

курсовая работа / sintez_posledovatelnogo_korrektiruyushego_ustroystva_dlya_si / КП ТАУ - черновик
.docФедеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
Ухтинский государственный
технический университет
Кафедра ЭАТП
Синтез последовательного корректирующего устройства для системы автоматического управления электроприводом постоянного тока
Пояснительная записка к курсовому проекту по ТАУ
КП 02069562-140604-17-05
Вариант №12
Зачётная книжка № 030599
Проект принял: Б.А. Иванов
Оценка _____________ «_____» ___________ 2008 г.
Выполнил студент
гр. ЭАП-1-05 Е.А.Кузьминов
Руководитель проекта Б.А.Иванов
200 8
8
СОДЕРЖАНИЕ:
-
 Содержание 3
Содержание 3
-
Введение 4
-
Задание на курсовую работу 5
-
Исходные данные 6
-
Синтез последовательного корректирующего устройства 7
-
Расчет переходных процессов 18
-
Оценка показателей качества переходных процессов 18
-
Построение годографа комплексного коэффициента передачи и ЛАЧХ, ЛФЧХ скорректированной системы 19
-
Заключение 22
-
Литература 23
 Введение.
Введение.
В теории систем автоматического управления синтезом называют технически обусловленное математическое обоснование структуры системы и определение ее оптимальных параметров.
В связи с трудностями, возникающими при полном синтезе САУ, чаще имеет смысл рассматривать задачу коррекции динамических и статических свойств уже имеющейся САУ.
Следует различать три основных метода коррекции динамических свойств линейных САУ.
При последовательной коррекции корректирующее устройство включают последовательно с элементами основного контура регулирования.
При прямой параллельной коррекции корректирующее устройство включают параллельно участку цепи управления, подлежащему коррекции.
Параллельные корректирующие устройства часто используются с целью введения в закон управления производных или интегралов от сигналов управления.
При введении местных обратных связей корректирующее устройство включают в цепь отрицательной обратной связи, которая охватывает избранные элементы САУ.
Применяемая в данной курсовой работе методика синтеза КУ ориентирована исключительно на минимально-фазовые системы, т.е. системы, у которых имеется однозначная зависимость между видом ЛАЧХ и ЛФЧХ, что позволяет судить о переходном процессе по одной ЛАЧХ.
Задание на курсовой проект по дисциплине
«Теория автоматического управления»
-
 Произвести
синтез последовательного корректирующего
устройства по логарифмическим частотным
характеристикам для обеспечения
заданных показателей качества системы
автоматического управления
электроприводом постоянного тока.
Произвести
синтез последовательного корректирующего
устройства по логарифмическим частотным
характеристикам для обеспечения
заданных показателей качества системы
автоматического управления
электроприводом постоянного тока. -
Рассчитать кривые переходных процессов в скорректированной системе при поступлении на вход сигналов
 и
и
 .
. -
Произвести оценку показателей качества переходных процессов и сравнить их с заданными.
-
Построить ККП и логарифмические частотные характеристики скорректированной системы при помощи программы «Matlab».
-
Сравнить результаты построений вручную и на ЭВМ.
Исходные данные:
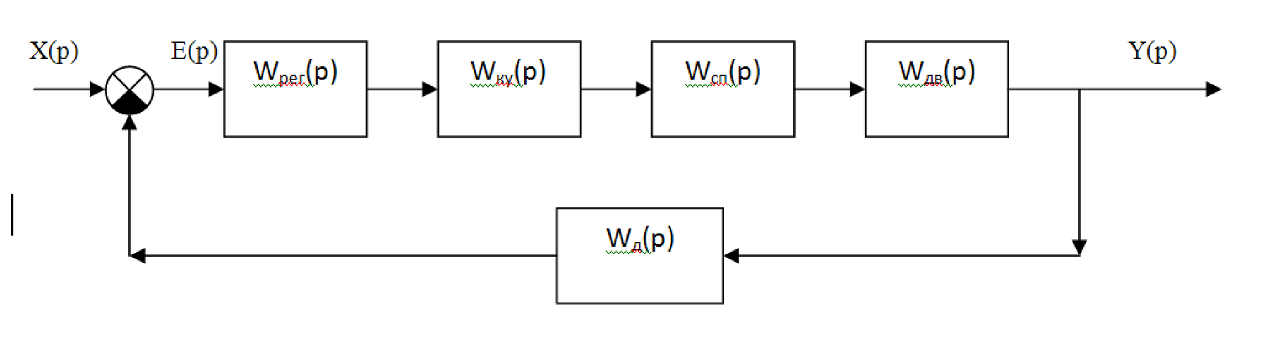
 Рис.1.
Структурная схема системы автоматического
управления двигателем постоянного
тока.
Рис.1.
Структурная схема системы автоматического
управления двигателем постоянного
тока.
![]() передаточная
функция регулятора скорости;
передаточная
функция регулятора скорости;
![]() передаточная
функция силового преобразователя,
передаточная
функция силового преобразователя,
где Ксп=42 – коэффициент усиления преобразователя,
Тсп=0,002 с – постоянная времени силового преобразователя;
![]() передаточная
функция датчика скорости,
передаточная
функция датчика скорости,
где КД=0,1 В∙с – коэффициент усиления датчика;
![]() передаточная
функция двигателя постоянного тока с
внутренним возбуждением, управляемого
по якорной цепи.
передаточная
функция двигателя постоянного тока с
внутренним возбуждением, управляемого
по якорной цепи.
Необходимо синтезировать корректирующее устройство последовательного типа, обеспечивающего необходимые показатели качества, при следующем задании:
Uдн=110 В – номинальное напряжение двигателя;
Рдн=0,1 кВт – номинальная мощность двигателя;
nдн=2000 об/мин – номинальная частота вращения двигателя;
Iян=1.22 А – номинальный ток цепи якоря;
Rян=3,0 Ом – номинальное активное сопротивление цепи якоря;
J=0,0015 кг∙м2 – приведенный к валу двигателя суммарный момент инерции.
 В
результате синтеза необходимо получить
следующие показатели качества.
В
результате синтеза необходимо получить
следующие показатели качества.
-
при изменении управляющего напряжения с постоянной скоростью V=10 В/с скоростная ошибка системы ск не должна превышать 0,12 В;
-
перерегулирование при номинальном ступенчатом воздействии не должно превышать значения зад=37%;
-
время регулирования при номинальном ступенчатом воздействии не должно превышать значения tуст=1 с.
Синтез последовательного корректирующего устройства.
-
Конкретизируем передаточную функцию двигателя. Для этого определяем значение коэффициента усиления Кдв и электромеханической постоянной времени Тм.
-
Вычислим номинальную угловую скорость вращения вала двигателя:
-
 ,
(1.1)
,
(1.1)
-
Определим конструктивные постоянные двигателя:
![]() ,
(1.2)
,
(1.2)
![]() ,
(1.3)
,
(1.3)
где МДн - номинальный вращающий момент двигателя, определяемый:
![]() ,
(1.4)
,
(1.4)
![]() ,
,
-
 Определим
искомые параметры Тм и КДв:
Определим
искомые параметры Тм и КДв:
![]()
![]() ,
(1.5)
,
(1.5)
Теперь передаточные функции всех элементов нескорректированной САУ определены.
-
Приведем заданную структурную схему САУ к структуре с единичной обратной связью.

Рис.2. Структурная схема САУ двигателем постоянного тока, приведенная к единичной обратной связи.
В дальнейшем будем рассматривать
замкнутую систему без учета звена с
передаточной функцией
![]() .
Это допустимо, т.к. датчик скорости
моделируется безынерционным элементом
с передаточной функцией WД=КД
и, следовательно, звено с передаточной
функцией
.
Это допустимо, т.к. датчик скорости
моделируется безынерционным элементом
с передаточной функцией WД=КД
и, следовательно, звено с передаточной
функцией
![]() может только масштабировать
выходную координату САУ, не меняя
динамических параметров.
Запишем передаточную функцию разомкнутой
нескорректированной
системы
может только масштабировать
выходную координату САУ, не меняя
динамических параметров.
Запишем передаточную функцию разомкнутой
нескорректированной
системы
![]() ,
(1.6)
,
(1.6)
 Для
рассматриваемого примера
Для
рассматриваемого примера
![]() ,
,
-
Определяем требуемый коэффициент усиления разомкнутой системы Крск, при котором обеспечиваются заданная точность в установившемся режиме.
![]() ,
,
-
Строим ЛАЧХ разомкнутой нескорректированной системы Lрнс с учетом требуемого коэффициента усиления Крск. Для этого предварительно находим:
![]() ,
,
и частоты перегиба Lрнс
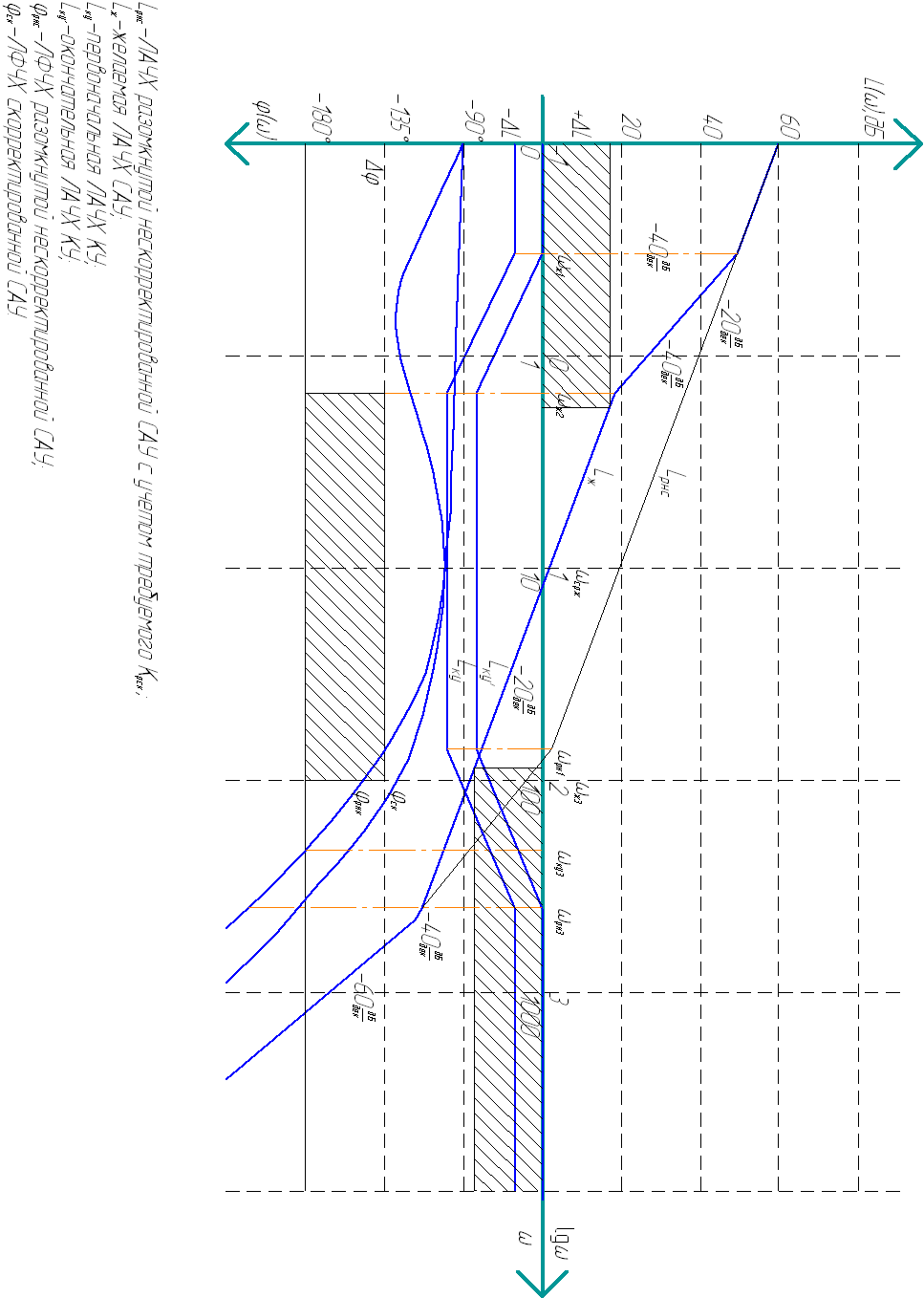
 Рис.3.
К синтезу последовательного корректирующего
устройства.
Рис.3.
К синтезу последовательного корректирующего
устройства.
-
 По
логарифмическому критерию устойчивости
оцениваем устойчивость
исходной нескорректированной системы.
Для этого по найденной ПФ
разомкнутой САУ (1.6) строим ЛФЧХ системы.
По
логарифмическому критерию устойчивости
оцениваем устойчивость
исходной нескорректированной системы.
Для этого по найденной ПФ
разомкнутой САУ (1.6) строим ЛФЧХ системы.
![]() .
.
По результатам построений, показанным на рис.3, можно сделать вывод что система устойчива, т.к. линия Lрнс() пересекает ось «раньше», чем кривая рнс() пресекает линию -2 (-180о).
-
Для выбора корректирующего устройства, обеспечивающего заданные динамические свойства системы, строим желаемую ЛАЧХ Lж()
-
Определяем параметр Рmax ВЧХ, соответствующий заданному значению перерегулирования зад. Для этого задаемся значением перерегулирования 1<зад, выбираем 1=25%. По графику (рис.П.1.1, с.62) определяем максимальное значение ВЧХ, соответствующее выбранному значению 1, Pmax=1,15. Находим минимальное значение ВЧХ.
-
![]() ,
(3.5)
,
(3.5)
Проверяем правильность выбора 1 подсчетом общего перерегулирования
![]() ,
(3.6)
,
(3.6)
Получаем значение перерегулирования близка зад. Следовательно, Рmax выбрано верно.
-
Определяем частоту положительности п, исходя из требуемого времени регулирования tуст и перерегулирования зад. Частоту
 находим с помощью графика
находим с помощью графика
 ,
изображенного на рис.П.1.1, с.62.
,
изображенного на рис.П.1.1, с.62.
![]() ;
;
![]() .
.
-
 Выбираем
частоту среза желаемой ЛАЧХ по найденному
значению п
Выбираем
частоту среза желаемой ЛАЧХ по найденному
значению п
![]() ,
,
![]()
Из графика, изображенного на рис.П.1.2, с.63, получаем значение запасов устойчивости по амплитуде и фазе в зависимости от величины перерегулирования %. Получим L=15 дБ и =45о. Граничные частоты среднечастотной асимптоты ж2 и ж3 определяем графически по уровню 2дБ по отношению к L. ж2=1,7100153 с-1 ж3=100 с-1.
-
За низкочастотную асимптоту желаемой ЛАЧХ принимаем низкочастотную асимптоту нескорректированной системы с требуемым коэффициентом усиления Крск. При этом будет достигнута требуемая точность в установившемся режиме. Высокочастотная асимптота желаемой ЛАЧХ совпадает с высокочастотной асимптотой ЛАЧХ нескорректированной САУ.
-
Сопрягаем построенные участки желаемой ЛАЧХ следующим образом: сопрягаем низкочастотную и среднечастотную асимптоты отрезком –40дБ/дек, а среднечастотную и высокочастотную отрезком –20дБ/дек.
-
Проверяем обеспечивается ли требуемое значение запаса устойчивости по фазе =45о. Для этого рассчитываем фазовый сдвиг в точках ж2 и ж3.
![]() ,
,
где Тку1=1/ж1=1/0,31623=3,1623 с,
Тку2=1/ж2=1/1,7100153=0,58479 с
Тку3=1/ку3=1/165,95587=0,0060256 с
Тку4=1/рн2=1/555,556=0,00199998 с
 Фазочастотная
характеристика желаемой системы имеет
вид
Фазочастотная
характеристика желаемой системы имеет
вид
![]() ,
,
![]() ,
,
Находим запас устойчивости по фазе в точке ж2=1,71 с-1
![]() ,
,
Находим запас устойчивости по фазе в точке ж3= 100 с-1
![]() .
.
Т.к. запас устойчивости по фазе в граничных точках получился не меньше заданного =45о, то построенную желаемую ЛАЧХ можно принять за ЛАЧХ скорректированной системы.
-
Определяем требуемую ПФ корректирующего устройства и его электрическую схему.
-
Определяем ЛАЧХ корректирующего устройства, вычитая ординаты ЛАЧХ нескорректированной системы. Для окончательного формирования ЛАЧХ КУ необходимо переместить полученную характеристику вдоль оси ординат на:
-
![]() ,
,
-
По полученной ЛАЧХ КУ восстанавливаем его ПФ
![]() ,
,
где Кку=0,5263;
Тку1=1/ж1=1/0,31623=3,1623 с,
Тку2=1/ж2=1/1,7100153=0,58479 с
Тку3=1/ку3=1/165,95587=0,0060256 с
Тку4=1/рн1=1/66,138=0,0151199 с – постоянные времени КУ.
-
 Т.к.
корректирующее устройство должно
уменьшать коэффициент усиления
разомкнутой системы, то для его схемной
реализации можно выбрать пассивное
корректирующее устройство. Выбираем
ЛАЧХ инерционно-форсирующего звена.
Т.к.
корректирующее устройство должно
уменьшать коэффициент усиления
разомкнутой системы, то для его схемной
реализации можно выбрать пассивное
корректирующее устройство. Выбираем
ЛАЧХ инерционно-форсирующего звена.
ПФ звена
 ,
,
где
![]()
Фазочастотная характеристика
![]() ,
,
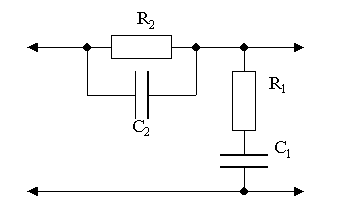

Рис.4. Принципиальная схема и ЛАЧХ инерционно – форсирующего звена.
Очевидно, что требуемая ПФ КУ может быть получена из табличной путем умножения на постоянный коэффициент Кку, который обеспечивается введением в схему делителя напряжения.
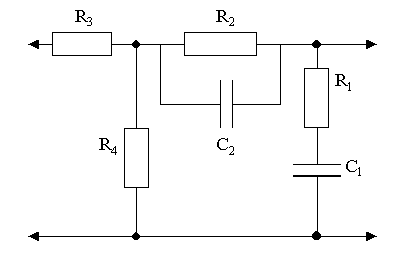
Рис.5. Принципиальная электрическая схема КУ
 При
соединении делителя напряжения с
корректирующим звеном необходимо
следить за тем, чтобы нижнее плечо
делителя (R4)
не оказалось зашунтировано элементами
звена. При практическом исполнении
схемы необходимо учитывать, что R2+R1>>R4.
При
соединении делителя напряжения с
корректирующим звеном необходимо
следить за тем, чтобы нижнее плечо
делителя (R4)
не оказалось зашунтировано элементами
звена. При практическом исполнении
схемы необходимо учитывать, что R2+R1>>R4.
-
Определяем величины сопротивлений резисторов и емкостей конденсаторов, входящих в электрическую схему корректирующего устройства. Для этого выражаем постоянные времени полученного КУ через номиналы резисторов и конденсаторов.
R1C1=T1=Tку2=0,58479 с;
R2C2=T2=Tку4=0,0151199 с;
Tку2/R1(R1+R2)=Tку1=3,1623 с.
Зададимся значением сопротивления одного из резисторов R1=100 кОм, тогда:
С1=0,58479/105=5,8479 мкФ,
R2=440758,2 Ом=441 кОм,
С2=3,43/108 Ф=0,0343 мкФ.
 Для
практического исполнения корректирующей
цепи выбираем из стандартного ряда
следующие номинальные значения:
Для
практического исполнения корректирующей
цепи выбираем из стандартного ряда
следующие номинальные значения:
R2=430 кОм (ряд Е24),
С1=5,6 мкФ (ряд Е12),
С2=33 пФ (ряд Е6),
Для определения номиналов резисторов делителя напряжения и используем следующее соотношения:
![]() ;
;
Выберем:
![]() ,
,
Определяем номиналы резисторов:
R4=3157,8 Ом=3,2 кОм,
R3=2842,2 Ом=2,8 кОм.
Для практического использования принимаем в соответствии со стандартным рядом R3=2,7 кОм (ряд Е12) и R4=3,3 кОм (ряд Е6).
-
Строим логарифмическую фазочастотную характеристику скорректированной системы. Для этого определяем выражение для ЛФЧХ системы
![]() .
.
Учитывая, что Tку4=Tм, получим
 .
.
Из анализа ЛАЧХ и фазочастотной характеристик разомкнутой скорректированной системы можно сделать вывод, что соответствующая замкнутая система устойчива и обладает запасами устойчивости по амплитуде и фазе =15,025о, L=23 дБ.
-
 Записываем
ПФ скорректированной системы в
разомкнутом состоянии
Записываем
ПФ скорректированной системы в
разомкнутом состоянии
 .
.
-
В методических указаниях к работе предлагалось упростить ПФ скорректированной системы в разомкнутом состоянии учитывая, что Тсп<<Тку1 и Тку3<<Тку1,
![]()
-
 Определяем
передаточную функцию скорректированной
системы в замкнутом состоянии
Определяем
передаточную функцию скорректированной
системы в замкнутом состоянии
 .
.
На этом синтез последовательной САУ считается законченным.
Расчет переходных процессов
Необходимо рассчитать переходные процессы в скорректированной системе при поступлении на вход сигналов
![]() ,
,
![]() ,
,
где
![]() 1/(В*с-2).
1/(В*с-2).
Для расчета используем программу «Matlab». Кривые переходных процессов представлены на рис.6., рис.7.
Оценка показателей качества переходных процессов
Для рис. 6. :
Перерегулирование
![]() .
.
Полученное значение перерегулирования лежит в допустимых пределах.
Время регулирования - это время того момента, с которого начинает выполняться неравенство
![]() ,
,
где
![]() .
.
 По
графику определяем, что
По
графику определяем, что
![]() с.
с.
Для рис. 7.:
Скоростную ошибку можно определить по
графику:
![]()
Построение годографа комплексного коэффициента передачи и ЛАЧХ, ЛФЧХ скорректированной системы.
Для построения используем программу «MATLAB».
Годограф представлен на рис. 8.
ЛАЧХ и ЛФЧХ разомкнутой нескорректированной системы – на рис. 9.
ЛАЧХ и ЛФЧХ разомкнутой скорректированной системы – на рис. 10.
ЛАЧХ и ЛФЧХ замкнутой скорректированной системы – на рис. 11.
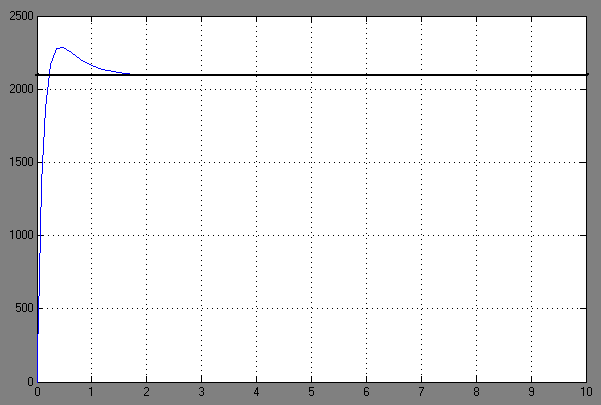
Рис. 6. График переходного процесса при x(t)=xном∙1(t).
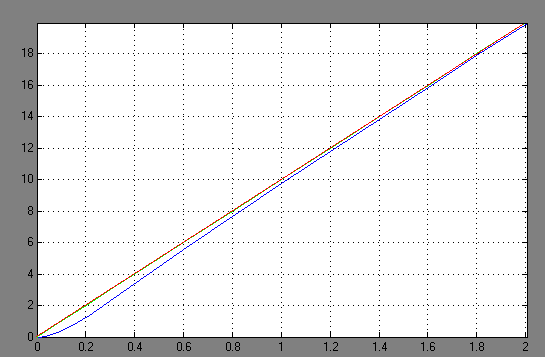
 Рис.
7. График переходного процесса при
x(t)=10t∙1(t).
Рис.
7. График переходного процесса при
x(t)=10t∙1(t).
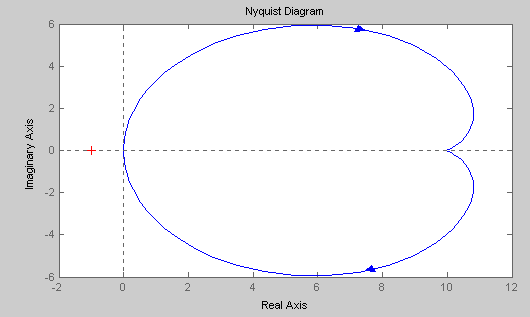
Рис. 8. Годограф замкнутой скорректированной системы.
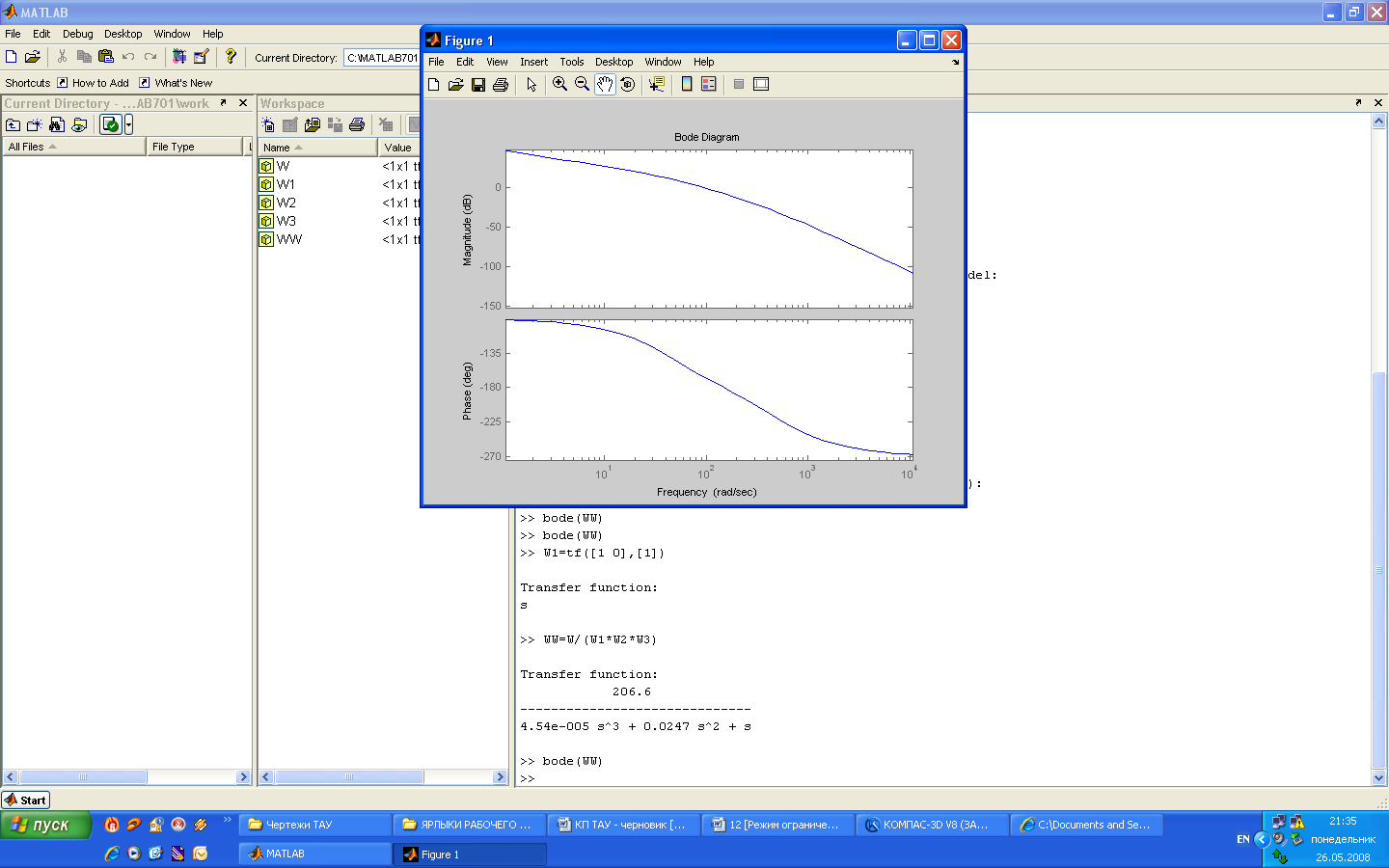
 Рис.
9. Графики ЛАЧХ
и ЛФЧХ разомкнутой нескорректированной
системы.
Рис.
9. Графики ЛАЧХ
и ЛФЧХ разомкнутой нескорректированной
системы.
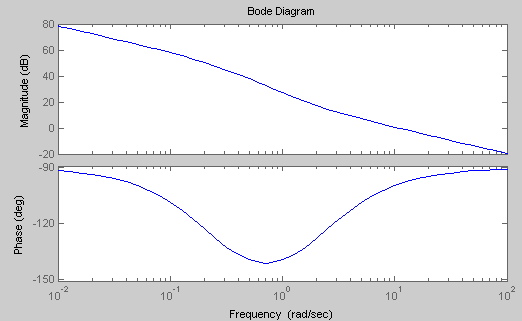
 Рис.
10. Графики ЛАЧХ
и ЛФЧХ разомкнутой скорректированной
системы.
Рис.
10. Графики ЛАЧХ
и ЛФЧХ разомкнутой скорректированной
системы.

 Рис.
11. Графики ЛАЧХ и ЛФЧХ замкнутой
скорректированной системы.
Рис.
11. Графики ЛАЧХ и ЛФЧХ замкнутой
скорректированной системы.
Заключение.
 Основываясь
на анализе характеристик, построенных
вручную и на ЭВМ, можно сделать следующие
выводы:
Основываясь
на анализе характеристик, построенных
вручную и на ЭВМ, можно сделать следующие
выводы:
-
Полученная в результате синтеза система является устойчивой (рис.3) (по логарифмическому критерию);
-
Графики ЛАЧХ и ЛФЧХ, построенные вручную, совпадают с построенными на ЭВМ;
-
Величина перерегулирования
 (Рис.6.), при подаче на вход сигнала
х(t)=xном∙1(t),
не превышает заданного значения;
(Рис.6.), при подаче на вход сигнала
х(t)=xном∙1(t),
не превышает заданного значения; -
Скоростная ошибка ск≈0,11 (Рис.7.), при подаче на вход системы сигнала x(t)=10t∙1(t), не превышает заданного значения.
Т.о. можно сделать вывод о том, что полученная в результате синтеза система автоматического управления удовлетворяет всем заданным параметрам.
Литература:
-
 Иванов
Б. А., Тимошенко Н. С., Соловей К. Н.
Частотная коррекция линейных систем
автоматического управления: Учебное
пособие. – Ухта: УИИ, 1996. –78 с., ил.
Иванов
Б. А., Тимошенко Н. С., Соловей К. Н.
Частотная коррекция линейных систем
автоматического управления: Учебное
пособие. – Ухта: УИИ, 1996. –78 с., ил. -
Бесекерский В. А., Попов Е. П. Теория систем автоматического регулирования. – М.: Наука, 1972-768 с.