

Основы теории цепей и сигналов. Ст.Преподаватель Рожко Жанна Анатольевна.
Тема 6: форма представление сигналов
Вовсе не безразлично, каким образом следует разрезать курицу или зайца.
Децим Юний Ювенал. Сатиры. Римский поэт, I-II в.
Римлянин с высшим образованием не мог себе позволить без соответствующего философского обоснования потрошить курицу, а тем более зайца. Но лично меня всегда больше интересует, что я с этого буду иметь.
Владимир Бакаев. Комментарии. Уральский геофизик, XX-XXI в.
Содержание:
1 Динамическое представление сигналов.
1.1 Разложение сигналов по единичным импульсам. Единичные импульсы. Разложение сигнала. Импульсный отклик линейной системы.
1.2. Свертка (конволюция). Интеграл Дюамеля. Техника свертки. Свойства свертки. Системы свертки. Начальные условия свертки.
2 Спектральное представление сигналов. Разложение сигналов по гармоническим функциям. Понятие собственных функций. Ряды Фурье. Тригонометрическая форма. Параметры эффекта Гиббса.
2.1 Непрерывные преобразования Фурье и Лапласа.Интеграл Фурье. Тригонометрическая форма. Преобразование Лапласа. Обобщенный ряд Фурье.
2.2 Основные свойства преобразований Фурье.Линейность. Свойства четности. Изменение аргумента функции. Теорема запаздывания. Преобразование производной. Преобразование интеграла. Преобразование свертки. Преобразование произведения. Спектры мощности. Равенство Парсеваля.
2.3 Спектры некоторых сигналов. Единичные импульсы. Гребневая функция. Спектр прямоугольного импульса. Треугольные импульсы. Экспоненциальный импульс. Функции Лапласа и Гаусса. Гармонические колебания. Радиоимпульс.
Литература.
Лекция 6.
1 Динамическое представление сигналов
1.1 Разложение сигналов по единичным импульсам [1,11].
Динамическая форма представления сигналов соответствует их естественной и привычной для нас форме математического описания в виде функций независимых переменных (аргументов). Моделирование и анализ линейных стационарных систем обработки сигналов произвольной формы в динамическом представлении базируется на разложении сигналов по единичным импульсам простейшей формы.
Единичные импульсы. В качестве математической модели единичного импульса при анализе аналоговых сигналов используют дельта-функцию.
Дельта-функция или функция Дирака. По определению, дельта-функция описывается следующими математическими выражениями (в совокупности):
(t-)
= 0 при t
,
 (t-)
dt = 1.
(t-)
dt = 1.
Функция (t-) не является дифференцируемой, и имеет размерность, обратную размерности ее аргумента, что непосредственно следует из безразмерности результата интегрирования. Значение дельта-функции равно нулю везде за исключением точки , где она представляет собой бесконечно узкий импульс с бесконечно большой амплитудой, при этом площадь импульса равна 1.
Дельта-функция является полезной математической абстракцией. На практике такие функции не могут быть реализованы с абсолютной точностью, так как невозможно реализовать значение, равное бесконечности, в точке t = на аналоговой временной шкале, т.е. определенной по времени также с бесконечной точностью. Но во всех случаях, когда площадь импульса равна 1, длительность импульса достаточно мала, а за время его действия на входе какой-либо системы сигнал на ее выходе практически не изменяется (реакция системы на импульс во много раз больше длительности самого импульса), входной сигнал можно считать единичной импульсной функцией со свойствами дельта - функции.
Функция Кронекера. Для дискретных и цифровых систем в качестве единичного импульса используется дискретный интегральный аналог дельта-функции - функция единичного отсчета (kt-nt), которая равна 1 в координатной точке k = n и нулю во всех остальных точках, при этом функция (kt-nt) определена только для целых значений координат k и n.
Математические выражения (t-) и (kt-nt) называют также импульсами Дирака и Кронекера. Однако, применяя такую терминологию, не следует забывать, что это не просто единичные импульсы в координатных точках и nt, а импульсные функции, определяющие как значения импульсов в определенных координатных точках, так и нулевые значения по всем остальным координатам, в пределе от - до .
Рис. 3.1.1.
s(t)
= s()(t-)
d.
(3.1.1)
s()(t-)
d.
(3.1.1)
s(kt)
= s(nt)(kt-nt).
(3.1.1')
s(nt)(kt-nt).
(3.1.1')
Для аналоговых сигналов разложение (3.1.1) в физическом представлении эквивалентно сканированию значений сигнала s(t) в моменты времени t = бесконечно узкой щелью, бегущей вдоль оси t. Для цифровых сигналов эта щель равна одному отсчету. Пример разложения дискретного сигнала приведен на рис. 3.1.1.
Единичные импульсные функции (t-), -<, и (kt-nt), -<n<, образуют в бесконечномерных пространствах системы координатных базисов {(t-)} и {(kt-nt)}, т.к. они не перекрываются и, соответственно, взаимно ортогональны. По этим координатным системам и производится разложение сигналов s(t) и s(kt). Совокупности проекций сигналов на координатные базисы представляют собой векторные описания сигналов.
Импульсный отклик линейной системы. Если на вход линейной системы в момент времени t = 0 подать единичный импульс (Дирака или Кронекера, в зависимости от типа системы), то на выходе мы получим реакцию системы на единичный входной сигнал. Эта реакция называется функцией импульсного отклика системы или импульсной характеристикой. Она однозначно определяется оператором преобразования h(..):
y(t) = T[(t-0)] = h(t). (3.1.2)
y(kt) = T[(kt-0)] = h(kt). (3.1.2')
Импульсный отклик аналоговой системы на входную дельта-функцию также в определенной степени представляет собой математическую абстракцию идеального преобразования. С практической точки зрения под импульсным откликом можно понимать отображение реакции системы на импульсный входной сигнал произвольной формы с единичной площадью, если длительность этого сигнала пренебрежимо мала по сравнению с временной (координатной) разрешающей способностью системы. Для цифровых систем импульсный отклик однозначно определяется реакцией системы на импульс Кронекера. Функцию импульсного отклика называют также весовой функцией системы.
Очевидно, что в линейных и инвариантных к сдвигу системах форма импульсного отклика не зависит от времени прихода входного сигнала и определяет только его положение на временной оси. Так, если входной импульс задержан (относительно 0) на время to, то соответствующий выходной сигнал будет определяться выражением:
y(t) = T[(t-to)] = h(t-to).
В любой системе, работающей в реальном масштабе времени, сигнала на выходе системы не может быть, если нет сигнала на ее входе. Отсюда следует односторонность импульсного отклика физических систем:
h(t-) = 0 при t<.
Для программных систем, работающих с зарегистрированными массивами цифровых данных, импульсный отклик может быть и двусторонним, так как при обработке сигналов в любой текущей точке kt системе доступны как "прошлые" отсчеты kt-nt, так и "будущие" отсчеты kt+nt. Это резко расширяет возможности программной обработки сигналов по сравнению с физическими системами.
Рис. 3.1.2.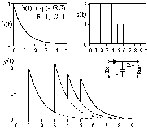
При подаче на вход RC-цепи единичного и очень короткого (t << RC) импульса заряда q емкость С заряжается до напряжения Vо = q/C, и начинает разряжаться через сопротивление R, при этом напряжение на емкости изменяется по закону v(t) = Voexp(-t/RC) = (q/C)exp(-t/RC). Отсюда, импульсный отклик RC-цепи на единичный входной сигнал с единичным значением заряда q = 1 равен: h(t) = (1/C)exp(-t/RC), где форма отклика определяется функцией экспоненты, а множитель (1/С) является масштабным преобразователем сигнала (заряда в напряжение). По существу, импульсным откликом системы определяется доля входного сигнала, которая действует на выходе системы по истечении времени t после поступления сигнала на вход (запаздывающая реакция системы).
Если функция импульсного отклика системы известна, то, с учетом принципа суперпозиции сигналов в линейной системе, можно выполнить расчет реакции системы в любой произвольный момент времени на любое количество входных сигналов в любые моменты времени их прихода путем суммирования запаздывающих реакций системы на эти входные сигналы. На рис. 3.1.2 приведен пример входного сигнала s(t) для RC-цепи в виде последовательности импульсов и реакция системы y(t) на такой входной сигнал, образованная суммированием реакций системы на каждый импульс.
Допустим, что на вход RC-цепи в моменты времени t1=1 и t2=2 поступили очень короткие (по сравнению со значением RC) импульсы заряда величиной A и В. Математически это можно отобразить сигналом s(t) = q1(t)+q2(t), где q1(t) = At-t1) и q2 = B(t-t2). Выходной сигнал системы при известном импульсном отклике h(t) отобразится формулой:
y(t) = T[q1(t)+q2(t)] = T[A(t-t1)]+T[B(t-t2)] = AT[(t-t1)]+BT[(t-t2)] = Ah(t-t1)+Bh(t-t2).
При расчете значений выходного сигнала в произвольный момент времени t после прихода на вход системы сигналов q1 и q2, например, для t = 5, для каждого из сигналов вычисляются значения их запаздывающих реакций: y1 = Ah(5-1) = Ah(4) и y2 = Bh(5-2) = Bh(3), после чего значения запаздывающих реакций суммируются у = у1+у2. Пример этой операции можно видеть на рис. 3.1.3, где для удобства графического представления приняты значения А=1 и В=1. Сущность операции не изменяется при любых значениях А и В, а в общем случае и для любого количества импульсов.
Рис. 3.1.3.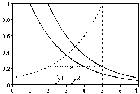
Такое, чисто математическое представление расчета более удобно для составления математических алгоритмов вычислений. Условно этот процесс для коротких входных импульсных сигналов может быть представлен в следующем виде. Для любой точки расчета ti выходного сигнала инвертированная по координатному направлению функция импульсного отклика h() помещается в эту точку ti и просматривается по своей координате с одновременным синхронным просмотром входного сигнала s(t) назад от точки расчета (прошлые значения входного сигнала) по координатам ti-. Значения всех встреченных при просмотре импульсов s(ti-) перемножаются со значениями h() и суммируются. Тем самым, для каждой текущей точки расчета ti в аналоговой системе выполняется операция:
y(ti)
= h()s(ti-)
d
h()s(ti-)
d
Соответственно в цифровых системах для произвольной точки k:
y(kt)
= h(nt)s(kt-nt).
(3.1.3')
h(nt)s(kt-nt).
(3.1.3')
Полученная сумма значений и будет представлять собой запаздывающую реакцию системы на все импульсы, поступившие на вход системы до текущей точки расчета выходного сигнала.
Таким образом, для линейных и стационарных систем легко определить их реакцию на любой входной сигнал, если известен импульсный отклик систем на единичный входной сигнал.