

Типовые динамические звенья систем автоматического управления
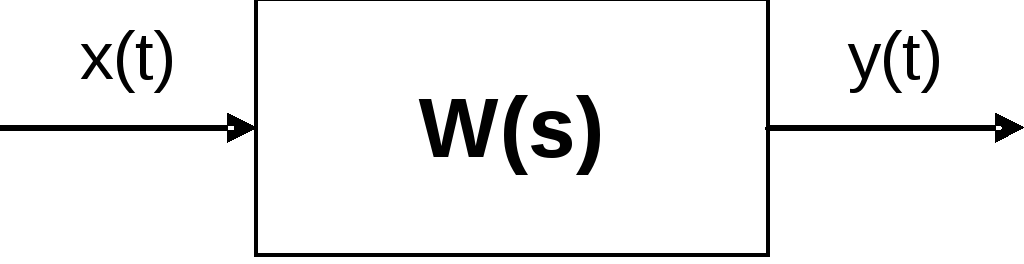
Что такое динамическое звено? На предыдущих занятиях мы рассматривали отдельные части системы автоматического управления и называли их элементами системы автоматического управления. Элементы могут иметь различный физический вид и конструктивное оформление. Главное, что на такие элементы подается некоторый входной сигнал х(t), и как отклик на этот входной сигнал, элемент системы управления формирует некоторый выходной сигнал у(t). Далее мы установили, что связь между выходным и входным сигналами определяется динамическими свойствами элемента управления, которые можно представить в виде передаточной функции W(s). Так вот, динамическим звеном называется любой элемент системы автоматического управления, имеющий определенное математическое описание, т.е. для которого известна передаточная функция.

а)
б)
Рис. 3.4. Элемент (а) и динамическое звено (б) САУ.
Типовые динамические звенья – это минимально необходимый набор звеньев для описания системы управления произвольного вида. К типовым звеньям относятся:
пропорциональное звено;
апериодическое звено I-ого порядка;
апериодическое звено II-ого порядка;
колебательное звено;
интегрирующее звено;
идеальное дифференцирующее звено;
форсирующее звено I-ого порядка;
форсирующее звено II-ого порядка;
звено с чистым запаздыванием.
Пропорциональное звено
Пропорциональное звено иначе еще называется безынерционным.
1. Передаточная функция.
Передаточная функция пропорционального звена имеет вид:
W(s) = K где К – коэффициент усиления.
2. Математическое описание звена.
Пропорциональное звено описывается алгебраическим уравнением:
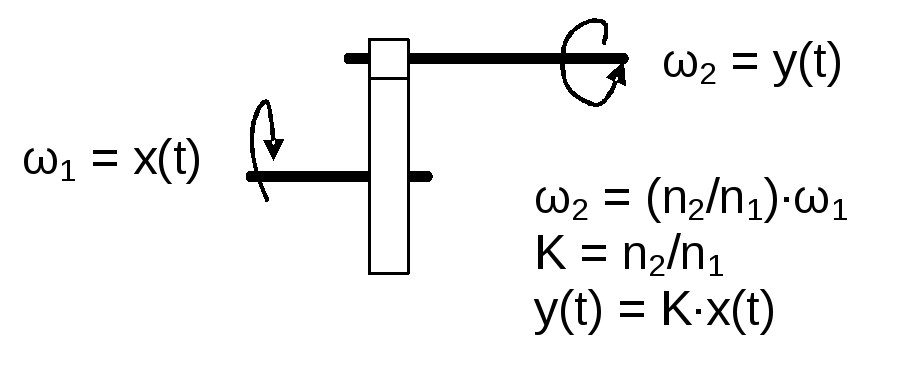
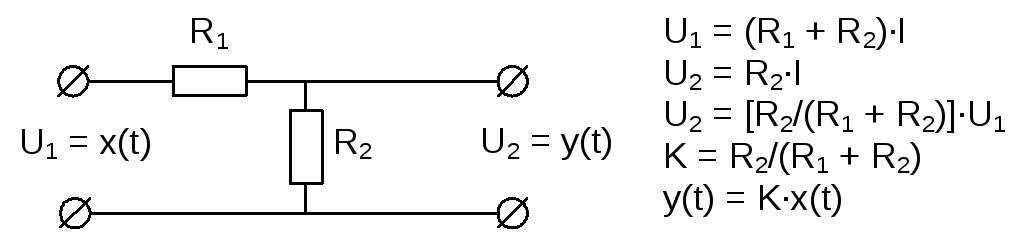
у(t) = K·х(t)
3. Физическая реализация звена.
Примерами таких пропорциональных звеньев могут служить, рычажный механизм, жесткая механическая передача, редуктор, электронный усилитель сигналов на низких частотах, делитель напряжения и др.

4. Переходная функция.
Переходная функция пропорциональное звена имеет вид:
h(t) = L-1[W(s)/s] = L-1[K/s] = K·1(t)
5. Весовая функция.
Весовая функция пропорционального звена равна:
w(t) = L-1[W(s)] = K·δ(t)


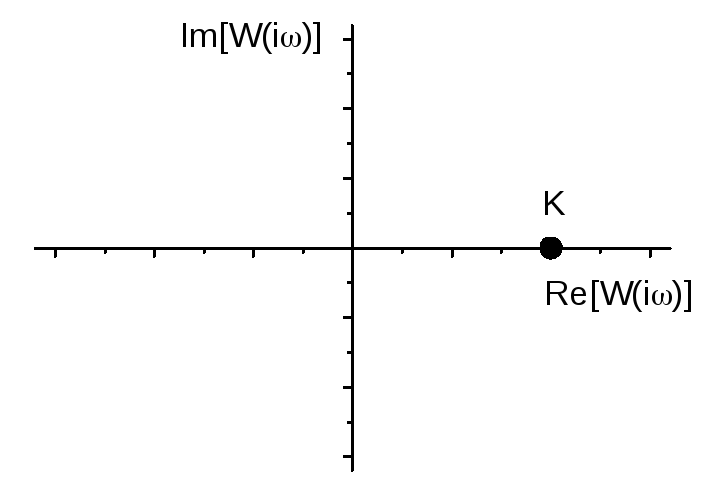

Рис. 3.5. Переходная функция, весовая функция, АФЧХ и АЧХ пропорционального звена.
6. Частотные характеристики.
Найдем АФЧХ, АЧХ, ФЧХ и ЛАХ пропорционального звена:
W(jω) = K = K +0·j
A(ω)
=
![]() =
K
=
K
φ(ω) = arctg(0/K) = 0
L(ω) = 20·lg[A(ω)] = 20·lg(K)
Как следует из представленных результатов, амплитуда выходного сигнала не зависит от частоты. В действительности ни одно звено не в состоянии равномерно пропускать все частоты от 0 до ¥, как правило на высоких частотах, коэффициент усиления становится меньше и стремиться к нулю при ω → ∞. Таким образом, математическая модель пропорционального звена является некоторой идеализацией реальных звеньев.
Апериодическое звено I-ого порядка
Апериодические звенья иначе еще называются инерционными.
1. Передаточная функция.
Передаточная функция апериодического звена I-ого порядка имеет вид:
W(s) = K/(T·s + 1)
где K – коэффициент усиления; T – постоянная времени, характеризующая инерционность системы, т.е. продолжительность переходного процесса в ней. Поскольку постоянная времени характеризует некоторый временной интервал, то ее величина должна быть всегда положительной, т.е. (T > 0).
2. Математическое описание звена.
Апериодическое звено I-ого порядка описывается дифференциальным уравнением первого порядка:
T·dу(t)/dt + у(t) = K·х(t)
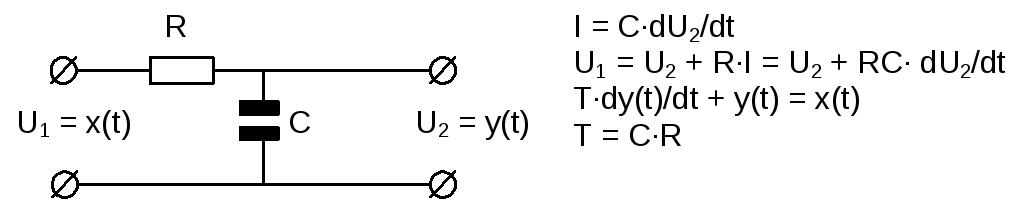
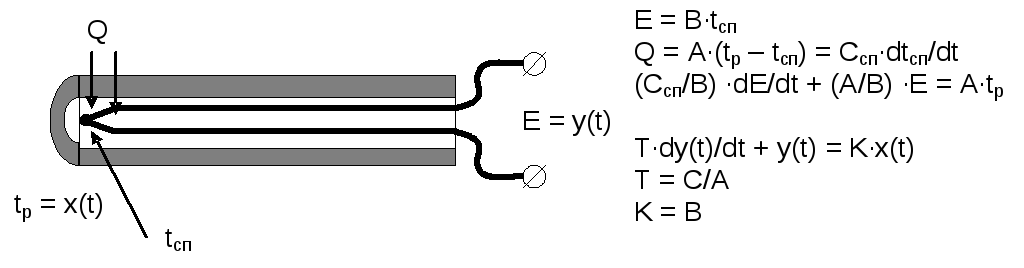
3. Физическая реализация звена.
Примерами апериодического звена I-ого порядка могут служить: электрический RC-фильтр; термоэлектрический преобразователь; резервуар с сжатым газом и т.п.

4. Переходная функция.
Переходная функция апериодического звена I-ого порядка имеет вид:
h(t) = L-1[W(s)·1(t)] = L-1[K/(s·(T·s + 1))] = K – K·e-t/T = K·(1 – e-t/T)
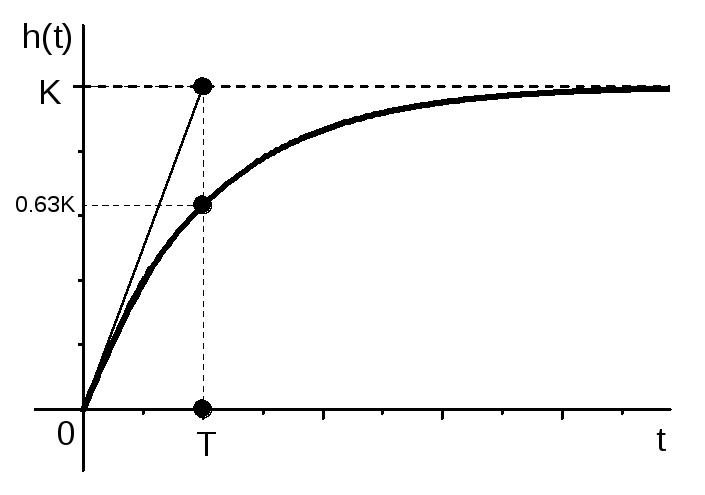

Рис. 3.6. Переходная характеристика апериодического звена I-го порядка.
Переходный процесс апериодического звена I-ого порядка имеет экспоненциальный вид. Установившееся значение равно: hуст = K. Касательная в точке t = 0 пересекает линию установившегося значения в точке t = T. В момент времени t = T переходная функция принимает значение: h(T) ≈ 0.632·K, т.е. за время T переходная характеристика набирает только около 63% от установившегося значения.
Определим время регулирования Tу для апериодического звена I-ого порядка. Как известно из предыдущей лекции, время регулирования – это время, после которого разница между текущим и установившимся значениями не будет превышать некоторой заданной малой величины Δ. (Как правило, Δ задается как 5 % от установившегося значения).
h(Tу) = (1 – Δ)·hуст = (1 – Δ)·K = K·(1 – e-Tу/T), отсюда е-Tу/T = Δ, тогда Tу/T = -ln(Δ), В итоге получаем Tу = [-ln(Δ)]·T.
При Δ = 0,05 Tу = - ln(0.05)·T ≈ 3·T.
Другими словами, время переходного процесса апериодического звена I-ого порядка приблизительно в 3 раза превышает постоянную времени.