

II. Динамическое исследование движения системы
Для определения истинного закона движения механизма достаточно установить закон движения ведущего звена механизма под действием заданных сил и моментов сил. При этом действующие силы и моменты, а также массы и моменты инерции звеньев следует привести к ведущему звену механизма, называемому звеном приведения.
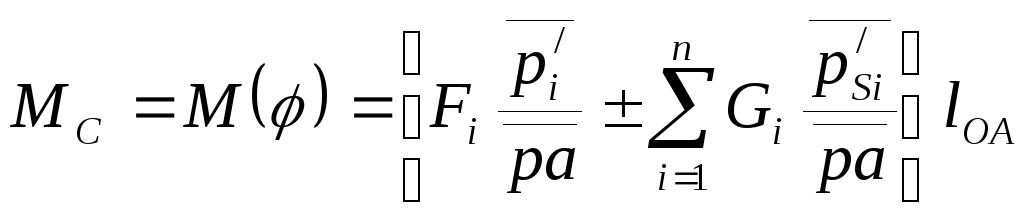
Уравнение приведенного момента сил сопротивления или движущих сил (в зависимости от типа машины) с учетом сил тяжести звеньев в общем виде в каждом расчетном положении имеет вид
![]() ,
,
где
MC
– приведенный момент сил сопротивления,
Нм; MД
– приведенный момент движущих сил, Нм;
– угол положения начального звена; i
– номер звена; Fi – сила
сопротивления (FС)
или движущая сила (FД),
Н;
![]() – скорость точки приложения силы
Fi,
м/c;
i
– угол между линией действия силы Fi
и вектором скорости
– скорость точки приложения силы
Fi,
м/c;
i
– угол между линией действия силы Fi
и вектором скорости
![]() ;
;
![]() – скорость кривошипной точки A,
м/с; lOA
– радиус кривошипа, м; Gi
– сила тяжести i-го
звена, Н;
– скорость кривошипной точки A,
м/с; lOA
– радиус кривошипа, м; Gi
– сила тяжести i-го
звена, Н;
![]() – линейная скорость центра масс i-го
звена, м/с.
– линейная скорость центра масс i-го
звена, м/с.
Для упрощения
расчетов рационально в представленном
уравнении заменить линейные скорости
(![]() ,
,![]() ,
,![]() )
их изображениями на планах скоростей.
Тогда расчетные формулы приведенного
момента сил сопротивления MC
или движущих сил MД
имеют вид
)
их изображениями на планах скоростей.
Тогда расчетные формулы приведенного
момента сил сопротивления MC
или движущих сил MД
имеют вид
 ,
,

где
![]() ,
,![]() – чертежные изображения проекций
векторов скоростей
– чертежные изображения проекций
векторов скоростей
![]() и
и
![]() на
линии действия соответствующих сил на
плане скоростей, мм;
на
линии действия соответствующих сил на
плане скоростей, мм;
![]() – чертежное изображение вектора скорости
кривошипной точки А
на плане скоростей, мм.
– чертежное изображение вектора скорости
кривошипной точки А
на плане скоростей, мм.
Окончательный вид расчетной формулы определяется схемой механизма и исходными данными к ней.
В
расчетах приведенного момента сил
сопротивлений при составляющих от сил
тяжести знак «плюс» соответствует
положениям механизма, в которых
вертикальные проекции скоростей
![]() направлены вверх, а знак «минус» – при
направлении этих проекций вниз. В
расчетах приведенного момента движущих
сил знаки при составляющих от сил тяжести
противоположны предыдущим: плюс при
направлении векторов
направлены вверх, а знак «минус» – при
направлении этих проекций вниз. В
расчетах приведенного момента движущих
сил знаки при составляющих от сил тяжести
противоположны предыдущим: плюс при
направлении векторов
![]() вниз и минус, если эти векторы направлены
вверх.
вниз и минус, если эти векторы направлены
вверх.
Рассчитывают МС (МД) за цикл движения механизма. По результатам вычислений в масштабе M [Нм/мм] строят график моментов сил сопротивлений или движущих сил M = f().
Интегрированием графика приведенного момента сил в функции угла положения начального звена получают масштабный график работ приведенных сил A = f(). Интегрирование выполняют ранее освоенным методом хорд, при этом предварительно задаются величиной полюсного расстояния h [мм]. Масштабный коэффициент A [Дж/мм] графика работ вычисляют по зависимости
![]()
где h – полюсное расстояние, мм; M – масштабный коэффициент графика моментов сил, Нм/мм; – масштабный коэффициент углов положения начального звена, рад/мм.
![]() ,
,
где
![]() – чертежное изображение угла поворота
кривошип, мм. Принимают равным значению
кратному 12 (180 мм, 240 мм и т.п.).
– чертежное изображение угла поворота
кривошип, мм. Принимают равным значению
кратному 12 (180 мм, 240 мм и т.п.).
Учитывая, что за цикл установившегося движения системы сумма работ сил сопротивлений и движущих сил равна нулю, строят прямолинейный график работ движущих сил AД = f() для технологической машины или график работ сил сопротивлений AС = f() для энергетической машины.
Алгебраическим суммированием ординат графиков работ сил сопротивлений AС = f() и движущих сил AД = f() строят масштабный график избыточной энергии T = f() рассматриваемой системы. При этом масштабный коэффициент T [Дж/мм] графика T = f() принимают равным масштабному коэффициенту графика работ A. Если амплитуда графика T = f() оказывается незначительной, то масштабный коэффициент следует уменьшить в 2÷3 раза и принять его равным T = A/(2÷3).
Для всех положений механизма за цикл движения рассчитывают избыточную энергию T [Дж], равную
![]() ,
,
где
![]() –
изображение избыточной энергии на
графике T = f(),
мм.
–
изображение избыточной энергии на
графике T = f(),
мм.
Результаты вычислений T за цикл движения механизма следует представить в табличной форме.
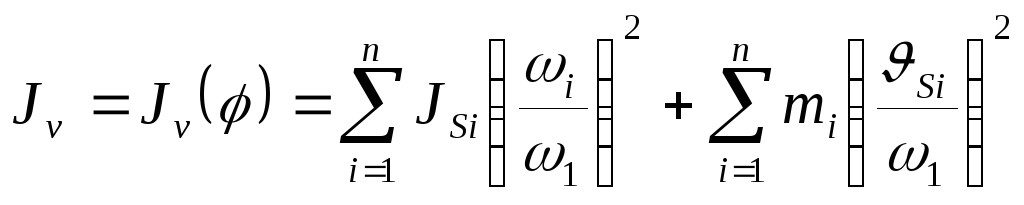
Составляют расчетную формулу приведенного к начальному звену момента инерции системы в функции угла положения. Окончательный вид расчетной формулы зависит от схемы механизма и исходных данных к ней.
Приведенный момент инерции системы равен
![]() ,
,
где Jc – постоянная часть приведенного момента инерции, кгм2; Jv – переменная часть приведенного момента инерции, кгм2.
![]() ,
,
где J01 – момент инерции начального звена относительно оси, проходящей через его центр масс, кгм2; JДВ – момент инерции ротора двигателя, кгм2; 1 – угловая скорость начального звена, с-1; ДВ – угловая скорость ротора двигателя, с-1.
 ,
,
где
JSi
– момент инерции i-го
звена относительно оси, проходящей
через центр масс звена, кгм2;
i
– угловая скорость i-го
звена, с-1;
mi
– масса i-го
звена, кг;
![]() – линейная скорость центра масс i-го
звена, м/с.
– линейная скорость центра масс i-го
звена, м/с.
Рассчитывают приведенный момент инерции системы за цикл движения механизма. По результатам вычислений в масштабе J [кгм2/мм] строят график приведенного момента инерции системы в функции угла положения начального механизма J = f().
Учитывая последующую необходимость исключения углового параметра , оси координат графика J = f() располагают повернутыми на 900 по часовой стрелке с размещением его на чертеже вверху справа от сетки предыдущих графиков M = f(), A = f(), T = f().
Решением дифференциального уравнения движения системы получают расчетную формулу скорости начального звена в функции угла положения
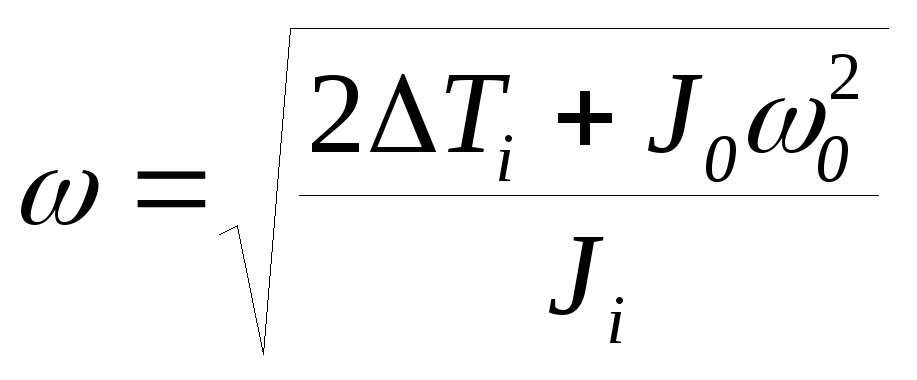 ,
,
где – угловая скорость начального звена в каждом расчетном положении механизма, c-1; J0 – приведенный момент инерции системы в начале цикла, кгм2; 0 – угловая скорость звена приведения в начале цикла, с-1; Ji – приведенный момент инерции системы в каждом расчетном положении, кгм2.
По результатам вычислений строят масштабный график угловой скорости звена приведения = f(), рассчитывают среднюю скорость ср за цикл движения и определяют фактический коэффициент неравномерности движения системы
![]() ,
,
где max – максимальная скорость ведущего звена, с-1; min – минимальная скорость ведущего звена, с-1; ср – средняя скорость ведущего звена, с-1.
Если расчетный коэффициент неравномерности оказывается больше заданного допустимого значения, следует перейти к проектированию маховика – регулятора движения системы.
Проектирование маховика – регулятора