

Системы автоматического управления.
Трудовая деятельность состоит из двух видов:
Рабочих операций
Операций управления
Замена человека на машины в первом случае называют механизацией, во втором – автоматизацией, которая осуществляется автоматическими устройствами или системами.
Объектами управления (ОУ) называют объекты, агрегатное состояние которых характеризует функционирование системы.
Устройство, заставляющее ОУ изменять свое состояние, называется управляющим устройством (УУ).
Совокупность УУ и ОУ образует систему автоматического управления (САУ).

Рис. 1. Незамкнутая система автоматического управления.
Сущность автоматического управления
сводится к обеспечению равенства
![]() .
.
Разность между
![]() и
и![]() называется рассогласованием (или
ошибкой):
называется рассогласованием (или
ошибкой):
![]()
Схема, приведенная на рисунке (см Рис. 1) не является замкнутой. Очень часто схемы САУ строятся по замкнутой схеме или по схеме с ОС.

Рис. 2. Замкнутая система автоматического управления.
Принципы управления.
Принцип разомкнутого управления.
Реализуется разомкнутой САУ, причем
![]() задается либо программным устройством,
либо датчиком. Равенство
задается либо программным устройством,
либо датчиком. Равенство![]() поддерживается подбором закономерности
в схеме.
поддерживается подбором закономерности
в схеме.
Принцип ОС.

Рис. 3. Принцип ООС
Замкнутая система осуществляет контроль
за величиной
![]() (уменьшает).
(уменьшает).
Управление откликом по рассогласованию называется регулированием, а система – системой с автоматическим регулированием (САР).
Классификация сау.
По виду (задаче) автоматического регулирования:
а) система стабилизации: (t) –var;y(t) –const
б) система программного управления
в) следящие системы:
![]()
По характеру управления и априорным данным
а) оптимальные системы
б) адаптивные системы, изменяющие свои параметры и даже структуру в зависимости от воздействия.
По характеру внутренних динамических процессов
а) системы непрерывного действия, которые работают с непрерывными аналоговыми сигналами.
б) импульсные системы
в) дискретные системы
г) цифровые системы
По характеру преобразования
а) линейные
б) нелинейные
По связи сигнала
а) детерминированные сигналы
б) со случайными (стохастическими) сигналами
Системы радиоавтоматики
Математическое описание линейных звеньев и систем.
Использование дифференциальных уравнений.

Рис. 4. Цепь с идеальными линейными элементами.
![]()
пусть
![]() тогда
тогда
![]()
Если
![]() тогда
тогда

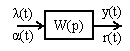
Рис. 5. Эквивалентная структурная схема.
Использование передаточных функций.
В основе этого метода лежит преобразование Лапласа:
![]()
Используем преобразование Лапласа для системы (Рис.):
пусть
![]() тогда
тогда
![]()

![]()
Рис. 6. К исследованию систем с помощью передаточных функций.
Использование временных характеристик.
Весовая (импульсная) функция цепи – отклик цепи на воздействие -импульса.
![]()
Пример: пусть
![]() ,
тогда
,
тогда![]()
При t< 0,w(t)= 0, размерность В/с.
Переходная характеристика – отклик цепи на воздействие единичного скачка (ступеньки).
![]()
Связь переходной и весовой функций:
![]()
Использование частотной передаточной функции.
![]() – комплексная частота
– комплексная частота
![]()
![]() где
где
![]()
![]()
Применение амплитудно-фазовых характеристик.
В теории управления принято строить частотную передаточную функцию в плоскости комплексного переменного. Такая характеристика называется амплитудно-фазовой или комплексной частотной характеристикой системы.
Пример:
![]()
![]()
где
![]()

Рис. 7. Комплексная частотная характеристика системы.
Применение ЛАЧХ.
![]()
![]() (в дБ)
(в дБ)
L() называется ЛАЧХ
При построении ЛАЧХ вместо откладывается в логарифмическом масштабе.
Применение асимптотических ЛАЧХ.
При анализе систем используется асимптотическая ЛАЧХ, которая строится на основании некоторых упрощений:
считается, что

Ошибка при этом не превышает нескольких дБ.
Пример:
![]() пусть
пусть![]() .
.
Введем сопрягающие частоты:
![]() где
где![]()

![]()

Если
![]() то
то![]() .
.
Если
![]() то
то![]() .
.
Если
![]() то
то![]() .
.
Если
![]() то
то![]() .
.

Рис. 8. Асимптотическая ЛАЧХ системы.
Анализ примера дает право сделать следующие вывод, что асимптотическая ЛАЧХ может быть построена по выражению для передаточной функции формальным образом с использованием следующих положений:
При переходе через сопрягающую частоту асимптотическая ЛАЧХ изменяет наклон
на –20 дБ/дек, если сопрягающая частота находится в знаменателе.
на +20 дБ/дек, если сопрягающая частота находится в числителе.
значение наклона кратно 20 дБ/дек.