

лабораторная работа / таулаб4dd / ваня
.docxСАРАТОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
КАФЕДРА «УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ»
ЛАБОРАТОРНАЯ РАБОТА №4
по дисциплине «ТАУ»
РАСЧЁТ КОРРЕКЦИИ ЛИНЕЙНЫХ САУ В РЕДАКТОРЕ MATLAB
Вариант №23(8)
Выполнил: ст.гр. УИТ-31
Федотов И.С.
Принял:
Шумарова О.С.
2011
Цель работы: изучение порядка расчёта последовательных корректирующих устройств системы автоматического управления.
Вариант задания для последовательной коррекции:
|
№ |
Передаточная функция |
Тпп ,с |
М |
σ ,% |
ед ,град |
Ωm ,рад/с |
εm ,рад/с2 |
|
8 |
|
- |
1,5 |
40 |
25 |
30 |
30 |

Расчёты:








Желаемая ПФ:


ПФ нескорректированной системы:
ПФ скорректированной системы:

С помощью пакета MatLab построим располагаемую ЛАЧХ, ЛФЧХ, желаемую ЛАЧХ, ЛФЧХ и ЛАЧХ корректирующего устройства.


Рис.1. Логарифмические характеристики.

Рис.2. Переходная характеристика располагаемой системы.
Система неустойчивая, определить колебательность и время переходного процесса процесса не возможно.
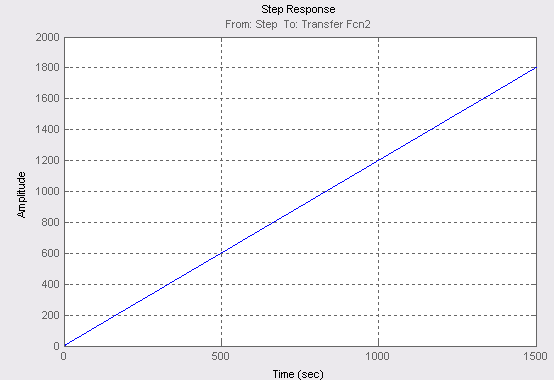
Рис.3. Переходная характеристика желаемой системы
Система неустойчивая, определить колебательность и время переходного процесса процесса не возможно.
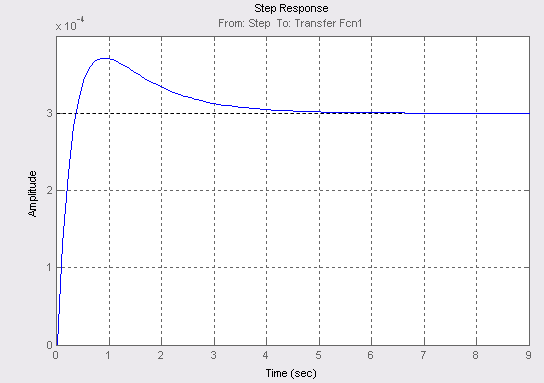
Рис.4. Переходная характеристика скорректированной системы.
-
Время переходного процесса: Tпп=2,8 с
-
Колебательность: n=0
-
По графику видно, что система возвращается в равновесное состояние, т.е. процесс является сходящимся. Откуда можно сделать вывод, что система сходящаяся.