

Углы вертикального наведения
При
стрельбе по наземным целям от -
![]() до +
до +
![]() ,
,
При
стрельбе по зенитным целям от -
![]() до +
до +
![]() ,
,
При
воздушной стрельбе от -
![]() до +
до +
![]() .
.
Угловые
скорости
в полевых станках невелики, в зенитных
и авиационных установках могут доходить
также до
![]() .
.
2.2.5. Ограничители рассеивания
Целый ряд условий боевого применения пулеметов (стрельба в проход и интервалы, стрельба через головы своих войск и т.п.) требует механического ограничения положения оружия на станке в определенных пределах углов горизонтального и вертикального наведения. Для этого служат ограничители горизонтального рассеивания и ограничители вертикального рассеивания.
По характеру ограничения встречаются два типа ограничителей.
1) со ступенчатым ограничением:
а) штифтовые (станок Дегтярева под СГ-43);
б) стопорные (станок под МГ-34);
в) рычажные (станок Малиновского под СГМ).
2) с бесступенчатым ограничением (польский станок под пулемет Браунинг).
2.2.6. Выравнивающие механизмы и устройства
Нормальное положение станка, обеспечивающее наилучшую меткость, состоит в том, что ось вертлюга должна быть вертикальной.
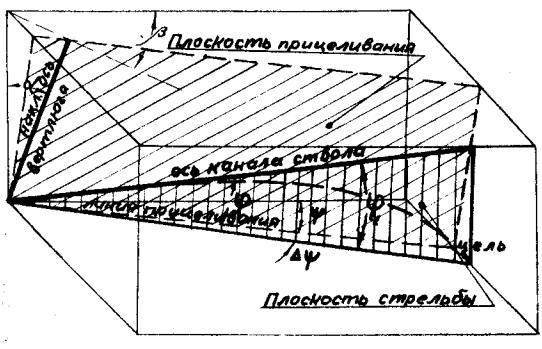
Отклонение оси вертлюга от вертикали приводит к явлению «сваливания» оружия, в результате которого вносятся ошибки в величину угла прицеливания и, следовательно, ухудшается меткость.
Ниже приведена схема, поясняющая это явление (рисунок 2.6).
- установленный угол прицеливания;
- угол отклонения оси вертлюга от вертикали;
- угол между плоскостью стрельбы и вертикальной плоскостью, в которой лежит наклонная ось вертлюга.
![]() -
действительный угол прицеливания;
-
действительный угол прицеливания;
![]() -
вертикальное отклонение оси канала;
-
вертикальное отклонение оси канала;
![]() -
горизонтальное отклонение оси канала.
-
горизонтальное отклонение оси канала.
Для
определения углов
![]() и
и
![]() могут быть использованы зависимости:
могут быть использованы зависимости:
![]() (2.1)
(2.1)
![]() (2.2)
(2.2)
![]() (2.3)
(2.3)
Зависимости
(2.1) и (2.2) показывают, что при данном
отклонении оси вертлюга -
![]() отклонения оси канала будут тем больше,
чем больше
отклонения оси канала будут тем больше,
чем больше
![]() .
.
При
![]()
![]() (2.1а)
(2.1а)
![]() (2.2а)
(2.2а)
Выравнивание оси вертлюга с целью избежания «сваливания» оружия может быть произведена:
1) выравниванием (горизонтированием) опорной поверхности подкашиванием и подкладыванием;
2) специальными выравнивающими механизмами и устройствами.
3) Применением одновременно обоих названных способов, так как, во-первых, механическое выравнивание имеет ограниченные пределы и, во-вторых, в ряде станков механическое выравнивание может быть произведено только в одной плоскости (ст. Соколова под с.п. Максима, германский станок – салазки).
|
|
|
Рисунок 2.6. Схема «сваливания» оружия. |
По полноте выравнивания различают два типа выравнивающих механизмов и устройств:
1) с полным выравниванием (в двух плоскостях);
2) с неполным выравниванием (в одной плоскости).
По способу осуществления выравнивания встречаются также два типа выравнивающих механизмов и устройств:
1) с выравниванием всего остова вместе с вертлюгом, например, выдвижением или поворотом ног;
2) с выравниванием одного вертлюга, например, скольжением стола по дугам остова (ст. Соколова).