

лабораторная работа / lab3 / ТАУ лаб №3
.doc
БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ ТЕХНОЛОГИИ И УПРАВЛЕНИЯИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ ФАКУЛЬТЕТ КАФЕДРА УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
Лабораторная работа №3по дисциплине ТАУИССЛЕДОВАНИЕ МОДАЛЬНОГО МЕТОДА СИНТЕЗА ЦИФРОВЫХ РЕГУЛЯТОРОВ ДЛЯ ЛИС
Выполнил: ст.гр.УИТ-42 Захаров М.В. Принял: Мефедова Ю.А. «___»____________2004г.
2004 |
Цель работы: исследование возможности модального метода синтеза цифровых регуляторов для ЛИС.
Вариант №6.
1.Выполним расчет дискретной передаточной функции по заданной непрерывной одним из известных методов
Передаточная
функция непрерывной части системы имеет
вид:
![]() ,
где
,
где
![]() ,
,
![]() ,
,
![]() ,
желаемые корни -
,
желаемые корни -
![]() ,
,
![]() ,
,
![]() .
Шаг дискретизации Т=0.2.
.
Шаг дискретизации Т=0.2.
![]()
Найдем дискретную передаточную функцию, используя Z-преобразования:
![]()
Разобьем
исходную передаточную функцию на
элементарные дроби:
![]()
По
таблице запишем соответствующие
z-преобразования
для каждой дроби и их сумму умножим на
![]() .
Имеем:
.
Имеем:
![]()
![]()
![]()
![]()
![]()
Получили дискретную передаточную функцию с фиксатором нулевого порядка
![]()
2.
Для объекта, математическая модель
которого задана дискретной передаточной
функцией:
![]() выполним
синтез астатического регулятора
модальным методом по формулам:
выполним
синтез астатического регулятора
модальным методом по формулам:
![]() ,
,
![]() ,
где
,
где
![]() .
Желаемые корни соответствуют минимальной
длительности процессов в замкнутой
системе.
.
Желаемые корни соответствуют минимальной
длительности процессов в замкнутой
системе.
Для
определения коэффициентов
![]() ,
,![]() ,
,![]() приравниваются
выражения:
приравниваются
выражения:
![]() и
и
![]()
где
![]()
![]()
![]()
![]()
упрощая, получим:
![]()
решим систему уравнений:


Тогда выражения корректора статики и динамики
![]()
![]()
![]()
Нормализация
корректора динамики:
![]()
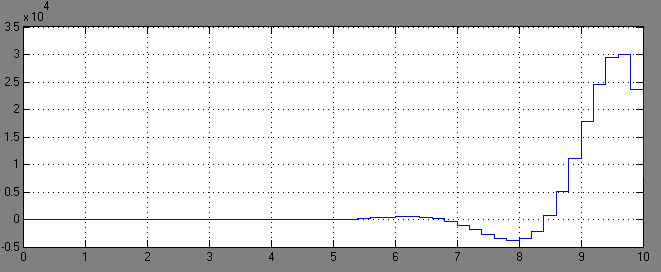
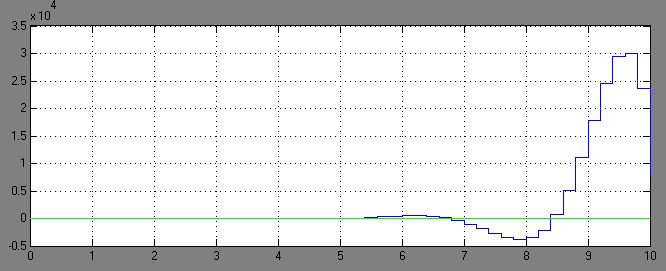
Модель без корректора (исходная модель):

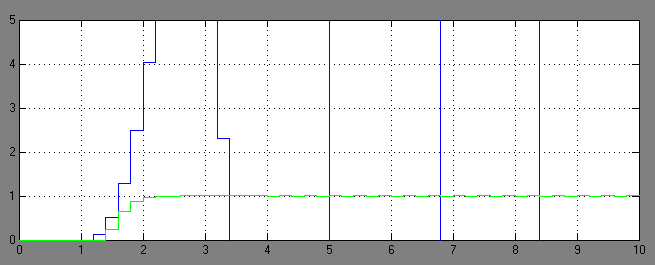
Модель с корректором:

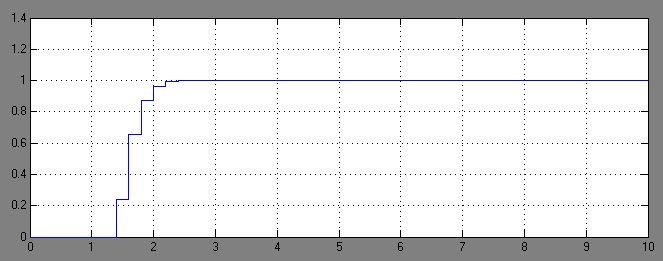
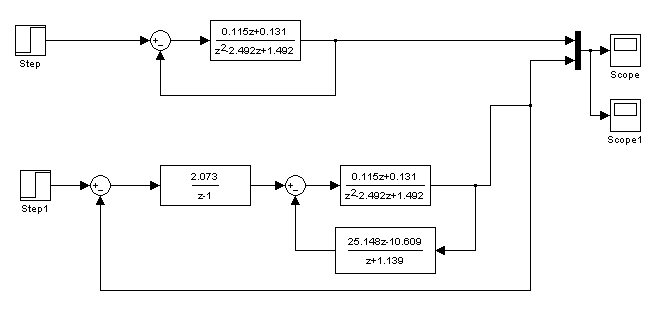
Увеличено:
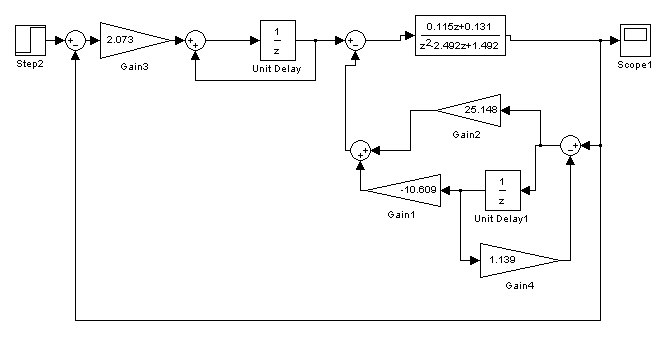
Модель с корректором, выполненным на элементах задержки:

Вывод. В процессе работы нами были рассчитаны параметры и произведен синтез цифрового корректора для линейной импульсной системы модальным методом. На основании полученных данных нами были построены Simulink-модели исходной системы, системы с цифровым корректором, заданным в виде дискретной передаточной функции, и корректором, построенным на базе цифровых элементов задержки. В результате сравнения полученных графиков можно сделать следующие выводы:
исходная система неустойчива, переходный процесс колебательный;
скорректированная система является устойчивой, переходный процесс монотонный, апериодический;
введение цифрового корректора позволяет добиться устойчивости системы, а также повысить качество управления, устранив перерегулирование при сохранении времени нарастания;
графики переходного процесса для системы, скорректированной корректором, заданным в виде передаточной функции и собранным на элементах задержки, совпадают, следовательно моделирование корректора произведено верно.