

лабораторная работа / ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ И КАЧЕСВО ЛИНЕЙНЫХ ИМПУЛЬСНЫХ СИСТЕМ- / la / LAB_TAU_1
.DOCБАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
КАФЕДРА УПРАВЛЕНИЯ И ИНФОРМАТИКИ В ТЕХНИЧЕСКИХ СИСТЕМАХ
ЛАБОРАТОРНАЯ РАБОТА №1
по дисциплине
Теория автоматического управления
Построение и исследование математических моделей
линейных импульсных систем (ЛИС)
Выполнил ст. гр. УИТ-42
Захаров М.В.
Проверил преподаватель
Мефедова Ю.А.________
«___» ___________2004
2004
Цель работы: исследовать математические модели ЛИС и способы построения этих моделей для линейных непрерывных объектов.
Вариант 6: передаточная
функция системы![]() ,
параметры T=0.1;
K=1.5;
T1=2.0;
T2=2.0.
Передаточная функция примет вид:
,
параметры T=0.1;
K=1.5;
T1=2.0;
T2=2.0.
Передаточная функция примет вид:
![]() .
.
Задание 1. Для заданной передаточной функции W(p) рассчитать W(z), используя матричный метод и метод Z-преобразования. Сравнить полученные результаты.
-
Получение W(z) используя матричный метод
По заданной передаточной функции запишем дифференциальное уравнение: 4y//+4y/+y=1.5u
Перейдем к уравнениям в пространстве состояний:


Следовательно, матрицы:
![]()
![]() и
и ![]()
Определим матрицы A и B:
A=
B=
Матрицы С и С совпадают.
Разностные уравнения имеют вид:

По найденному разностному уравнению построена математическая модель системы, реализованная в Simulink. Структурная схема представлена на рисунке 1.

Рисунок 1
Дискретную
передаточную функцию с фиксатором
нулевого порядка находим по формуле:
![]()
![]()

-
Получение W(z) используя z-преобразование
Определим значение
![]()
Разобьем выше
приведенную форму передаточной функции
на элементарные дроби:
![]() .
.
Запишем соответствующие
z-преобразования
для каждой дроби и умножим их на
![]() :
:

После упрощения
получим следующий вид дискретной
передаточной функции с фиксатором
нулевого порядка:
![]()
Как видно полученные разными способами передаточные функции отличаются незначительно, что подтверждает правильность решения.
2. Воспользуемся пакетом Simulink для определения переходных функций системы.

Рисунок 2 –Модель системы 1

Рисунок 3 – Переходный процесс в непрерывной и дискретной системе

Рисунок 3 - Модели систем 2
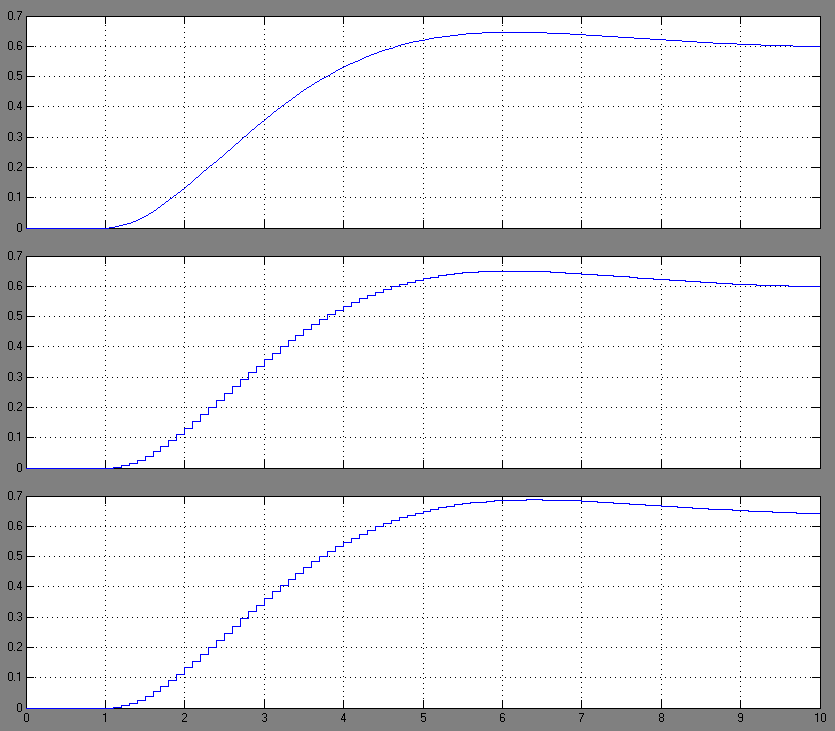
Рисунок 4 – Переходные процессы
Вывод: сравнивая динамические свойства непрерывных и дискретных моделей системы, можно заметить визуальную близость переходных характеристик двух систем. Это наталкивает на мысль о возможности идентичного применения обоих видов систем. Узким местом работы любой дискретной системы становится частота дискретизации. Для заданной системы частота в 0.1 Гц оказалась достаточной для приближения характеристик дискретной и непрерывной системы друг к другу, однако заданная система является относительно простой. Графики переходных характеристик говорят о существенной зависимости плавности управления от частоты дискретизации. Так, дискретная модель, полученная пакетом Simulink, достаточно далека от модели, полученной в ходе лабораторной работы. На Simulink-овской модели наблюдается начальный всплеск уровня сигнала, которого нет на других графиках, т.е. точность управления в системах с ООС оставляет желать лучшего. Как итог, дискретные системы применимы в тех случаях, когда аппаратное обеспечение определяет быструю реакцию системы на скоростные изменения входного сигнала.