

лабораторная работа / ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ И КАЧЕСВО ЛИНЕЙНЫХ ИМПУЛЬСНЫХ СИСТЕМ- / lab2 / Lab_TAU_2
.docБАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
КАФЕДРА УПРАВЛЕНИЯ И ИНФОРМАТИКИ В ТЕХНИЧЕСКИХ СИСТЕМАХ
ЛАБОРАТОРНАЯ РАБОТА №2
по дисциплине
Теория автоматического управления
Исследование устойчивости и качества линейных импульсных систем
Выполнил ст. гр. УИТ-42
Захаров М.В.
Проверил преподаватель
Мефедова Ю.А.________
«___» ___________2004
2004
Цель работы: исследовать влияние параметров ЛИС на устойчивость и качество переходных процессов.
Вариант 6: передаточная
функция системы![]() ,
параметры T=0.2;
K=1.5;
T1=2.0.
Передаточная функция примет вид:
,
параметры T=0.2;
K=1.5;
T1=2.0.
Передаточная функция примет вид:
![]() .
.
-
Найдем дискретную передаточную функцию разомкнутой системы с использованием z-преобразований
![]()
Разобьем исходную передаточную функцию на элементарные дроби.
![]()
Запишем соответствующие
z-преобразования
для каждой дроби и их сумму умножим на
![]() .
Имеем
.
Имеем
![]()
После упрощений получим следующий вид дискретной передаточной функции с фиксатором нулевого порядка.
![]()
-
Определим дискретную передаточную функцию замкнутой системы
![]()
После подстановки и упрощения получим:
![]()
-
Определим устойчивость системы по критерию Шур-Кона
Характеристическое уравнение замкнутой системы имеет вид:
![]()
Для уравнения второго порядка воспользуемся следующими условиями:
Согласно критерию, система устойчива.
-
Исследуем систему с помощью билинейного преобразования
 .
.
Характеристическое уравнение замкнутой системы представим в ω-форме:
![]()
Получим:
![]()
или
![]()
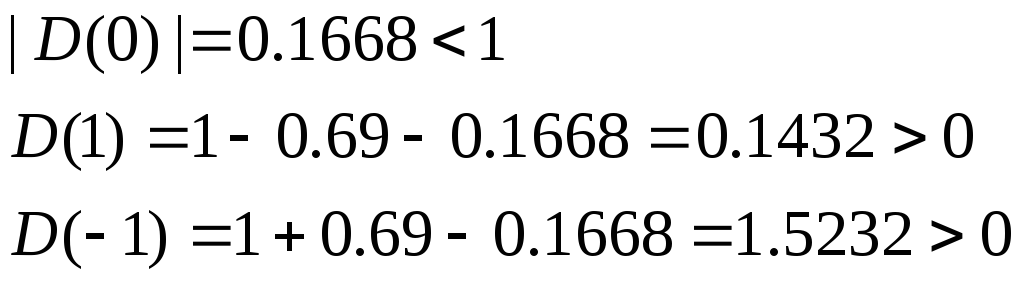
Для анализа устойчивости этого уравнения используем критерий Гурвица.
а0=1.5232>0
Δ1=а1=2.3336>0
Согласно критерию, система устойчива.
-
Модели непрерывной системы в замкнутом состоянии представлены на рисунке 1. Причем вторая модель с установленным в системе интегратором, а третья с найденным значением K, при котором система находится на границе устойчивости. На рисунке 2 представлены переходные характеристики построенных моделей.

Рисунок 1 – Модели непрерывной системы
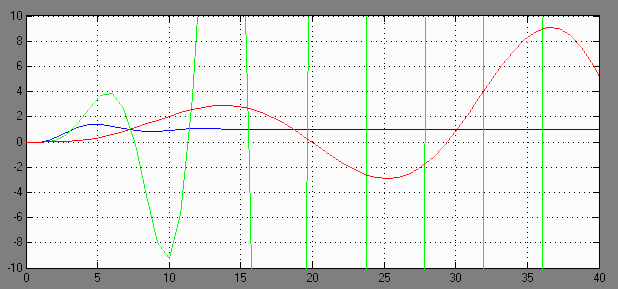
Рисунок 2 – Переходные процессы непрерывной системы
Модели импульсных систем:
-
непрерывная система с экстраполятором нулевого порядка;
-
непрерывная система с дискретной передаточной функцией, включающей передаточную функцию экстраполятора;
-
непрерывная система с экстраполятором нулевого порядка;
-
непрерывная система с экстраполятором нулевого порядка с коэффициентом К, выводящем систему на границу устойчивости;
-
непрерывная система с экстраполятором и цифровым интегратором с коэффициентом К, выводящем систему на границу устойчивости.
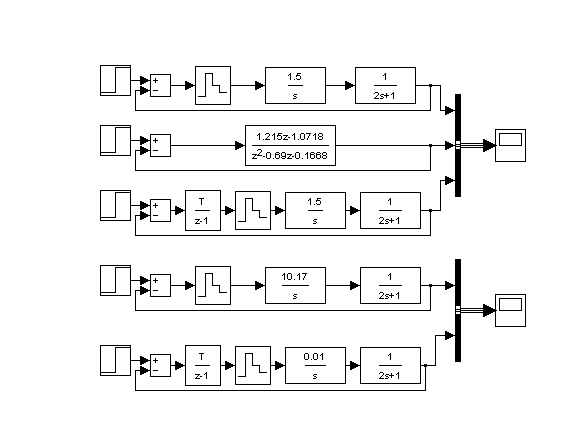
Рисунок 3 – Модели ЛИС
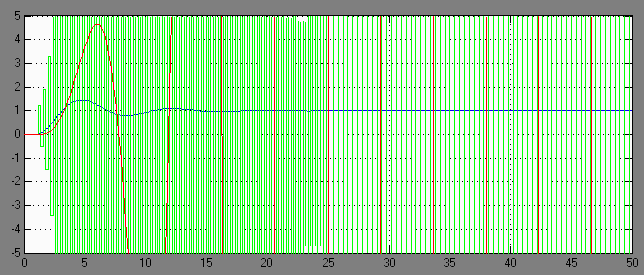
Рисунок 4 – Переходные характеристики систем 1, 2 и 3

Рисунок 5 – Переходные характеристики систем 4 и 5
Вывод:
-
Непрерывная система устойчива, но при введении интегратора становится неустойчивой при любом K. Нельзя исключать влияние интегрирующего звена, значительно снижающего устойчивость.
-
Непрерывная система с экстраполятором нулевого порядка имеет несколько меньший запас устойчивости, при К превышающем 10.17 система становится неустойчивой. В целом цифровая система достаточно близка по своим качества к непрерывной системе, но согласно графикам имеет более высоко качество управления.