

16 Поясните способ регулирования координат электропривода с асинхронным двигателем изменением числа пар полюсов. Приведите соответствующие схемы, статические характеристики и формулы.
Данный способ регулирования скорости может быть реализован только при использовании специальных многоскоростных АД, у которых каждая статорная обмотка состоит из нескольких одинаковых секций, путем разных схем соединения которых может быть изменено число пар полюсов АД.
![]()
Рассмотрим простейший случай переключения секций, когда каждая статорная обмотка состоит из двух одинаковых секций.
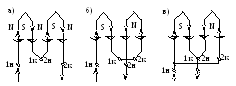
Рисунок 3.13 – Схемы соединения секций статорных обмоток многоскоростных АД при изменении числа пар полюсов
Для определения числа пар полюсов задаемся мгновенным направлением тока в секциях, по правилу буравчика определяем направление магнитных силовых линий и расставляем полюса.
На рисунке 3.13,а секции статорной обмотки соединены последовательно и согласно и число пар полюсов р=2.
На рисунке 3.13,б секции статорной обмотки соединены последовательно и встречно и р=1.
На рисунке 3.13,в секции соединены параллельно и р=1.
На практике наиболее часто используются две схемы переключения секций статорных обмоток многоскоростных АД. Первая – со звезды на двойную звезду (рисунок 3.14,а). Вторая – с треугольника на двойную звезду (рисунок 3.14,б).
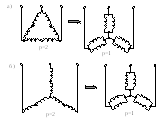
Рисунок 3.14 – Схемы переключения многоскоростных АД
В схемах треугольника и звезды секции соединены последовательно и согласно, а в схеме двойной звезды – параллельно, что вызывает уменьшение числа пар полюсов.
Механические характеристики при таких переключениях представлены на рисунке 3.15.
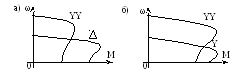
Рисунок 3.15 – Механические характеристики АД при изменении числа пар полюсов
Достоинства способа:
1) Экономичность, так как нет дополнительных потерь энергии.
2) Высокая жесткость характеристик.
3) Высокая перегрузочная способность.
Недостатки:
1) Ступенчатое изменение скорости.
2) Небольшой диапазон регулирования скорости.
17 Поясните, как производится торможение противовключением электропривода с асинхронным двигателем. Приведите механические характеристики.
Торможение противовключением. Осуществляется изменением порядка чередования фаз питающего АД напряжения. Допустим, что до торможения АД работал на характеристике 1 в точке а при чередовании фаз сети АВС (рисунок 3.19). Тогда при смене фаз на ВАС он перейдет на характеристику 3 в точку b. Участок bd будет соответствовать режиму торможения противовключением.

Рисунок 3.19 – Механические характеристики при торможении
противовключением и рекуперативном торможении
Второй способ торможения противовключением может быть реализован только при активной нагрузке электропривода. Допустим, что до торможения АД подъемного механизма работал на характеристике 1 в точке а, и требуется осуществить спуск груза, обеспечивая его торможение с помощью АД. Для этого двигатель включается в направлении подъема с большим добавочным резистором в цепи ротора ( характеристика 2). Двигатель переходит на характеристику 2 и после окончания переходных процессов будет работать в точке е. При этом в электроприводе будет происходить спуск груза, торможение которого будет осуществляться магнитным полем статора, вращающимся в направлении подъема.