

лабораторная работа / ТАУ_линейки / построение ЛАЧХ
.doc6 ПОСТРОЕНИЕ ЖЕЛАЕМОЙ ЛОГАРИФМИЧЕСКОЙ АМПЛИТУДО-
ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ СИСТЕМЫ
Желаемой называют асимптотическую ЛАЧХ разомкнутой системы, имеющей желаемые (требуемые) статические и динамические свойства. Желаемая ЛАЧХ (ЖЛАЧХ) состоит из трех основных асимптот: низкочастотной, среднечастотной и высокочастотной. Среднечастотная асимптота ЛАЧХ разомкнутой системы и ее сопряжение с низкочастотной определяют динамические свойства системы – устойчивость и показатели качества переходной характеристики.
Поскольку в исходной САУ присутствует дискретное устройство, построение желаемой ЛАЧХ ведется методом запретной зоны.
Построение ЖЛАЧХ начинаем с построения запретной зоны, для чего необходимо найти координаты рабочей точки, для этого нужны следующие данные:
g'=0,2 (м/с) - скорость изменения входной величины,
g''=0,04 (м/с2) - ускорение изменения входной величины,
σд=0,05 - допустимая ошибка.
Найдем значение частоты рабочей точки:
![]() с-1.
(44)
с-1.
(44)
Найдем значение амплитуды рабочей точки:
 (45)
(45)
Через полученные координаты проводим прямую с наклоном -20 дБ/дек. Эта прямая является верхней границей запретной зоны.
По
номограмме Солодовникова и заданному
в техническом задании желаемому
перерегулированию
![]() % и времени регулирования
% и времени регулирования
![]()
![]() c
определяем частоту среза:
c
определяем частоту среза:
![]() с-1.
(46)
с-1.
(46)

Рисунок 8 – Номограмма Солодовникова
По
заданной колебательности
![]() найдем среднечастотную область построения
ЖЛАЧХ. Верхней границе этой области
соответствует значение
найдем среднечастотную область построения
ЖЛАЧХ. Верхней границе этой области
соответствует значение
![]() дБ,
нижней –
дБ,
нижней –
![]() .
.
Наклон ЖЛАЧХ в среднечастотной области должен быть -20 дБ/дек, поэтому через частоту среза в этой области проводим прямую с наклоном -20 дБ/дек. В высокочастотной области ЖЛАЧХ сопрягается с исходной ЛАЧХ, то есть будет иметь такие же наклоны. Низкочастотная область не имеет большого значения, поэтому достраивается по исходной либо произвольно. Полученная ЖЛАЧХ показана на рисунке 9.
Для улучшения параметров системы в ней необходимо установить последовательное корректирующее устройство.
Построить ЛАЧХ корректирующего устройства можно с помощью графического вычитания реальной ЛАЧХ из желаемой ЛАЧХ, полученная ЛАЧХ корректирующего устройства показана на рисунке 9.

Рисунок 9 – ЛАЧХ, ЖЛАЧХ, ЛАЧХ корректирующего устройства
7 РАСЧЕТ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
Для коррекции в системе применяется корректирующее устройство (КУ) последовательного типа. КУ можно включать между различными элементами исходной системы. При выборе места включения руководствуются значением вносимой устройством погрешности. Наиболее предпочтительным вариантом является установка корректирующего устройства в электрическую цепь после микропроцессора.
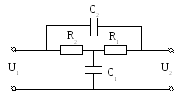
Рисунок 10 – Схема корректирующего устройства
Передаточная функция корректирующего звена:
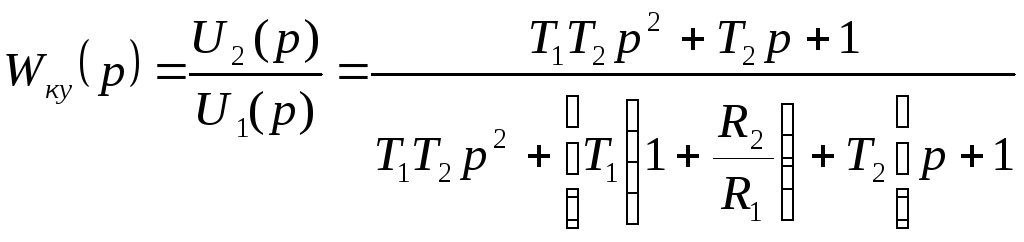 (47)
(47)
![]() (48)
(48)
![]() (49)
(49)
L0=1
L∞=1
Из графика ЛАЧХ корректирующего устройства определим все частоты излома:
λа=0,2 с -1
λв=1 с -1
λ1=10 с -1
λ2=150 с -1
Постоянные времени, соответствующие этим частотам:
![]() (50)
(50)
![]() (51)
(51)
![]() (52)
(52)
![]() (53)
(53)
Задаемся значениями:
R1=R2 =1000 Ом
![]() (54)
(54)
![]() (55)
(55)
Подставляя все найденные параметры в выражение для передаточной функции корректирующего устройства (47) получаем передаточную функцию в следующем виде:

Коррекцию системы можно произвести при помощи программы для микропроцессора, которая будет реализовывать передаточную функцию корректирующего устройства. Чтобы составить программу необходимо найти разностное уравнение в реальном масштабе времени.
После
замены
![]() ,
,
![]() ,
передаточная функция корректирующего
устройства примет вид:
,
передаточная функция корректирующего
устройства примет вид:
![]()