

10.4 Порядок виконання роботи
1. Запустить Vissim.
2. Построить в программе Vissim виртуальный лабораторный стенд для исследования нелинейных звеньев (рисунок 10.1).
Вынести на рабочее поле Vissim’а генератор растущего ramp сигнала (Blocks – Signal Producer - ramp), и два осциллографа (Blocks – Signal Consumer – Plot).
На один осциллограф вывести входной сигнал (с генератора) и статическую характеристику нелинейной системы (с выхода схемы).
Вынести на рабочее поле блок дифференцирования Derivative (файл derivative.vsm).
На второй осциллограф – фазовый портрет системы.
Для
реализации выражения нелинейной
характеристики ( )
используется
блок pow
(Blocks
–Arithmetic-pow),
который
масштабирует сигнал, возводя его в
степень.
)
используется
блок pow
(Blocks
–Arithmetic-pow),
который
масштабирует сигнал, возводя его в
степень.
Нажатие правой кнопки мыши позволит ввести параметры масштабирования –степень (рисунок 10.2).
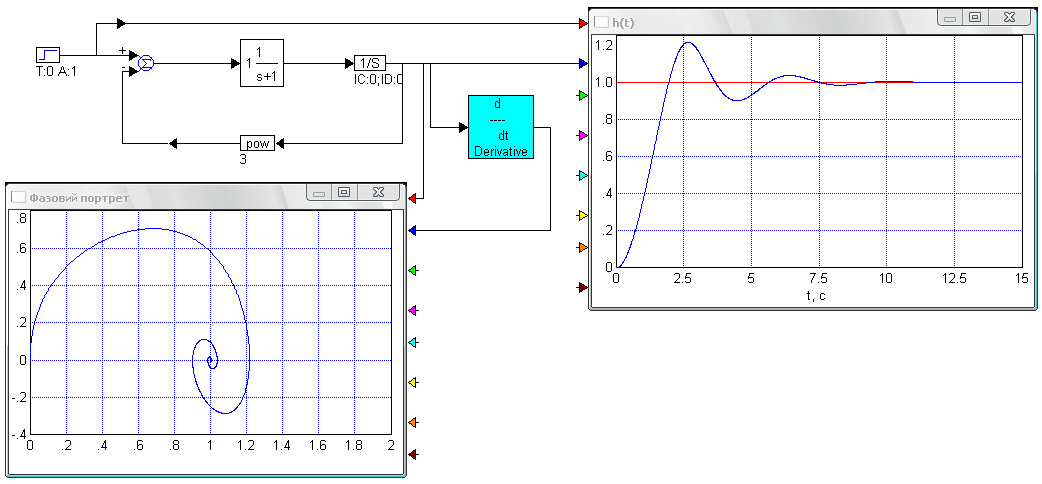
Рисунок 10.1 – Виртуальный лабораторный стенд для исследования нелинейной системы автоматического регулирования
Ступінь
Рисунок 10.2 – Окно задания параметров блока pow
Для
реализации выражения нелинейной
характеристики
 используется
блок pow
(Blocks
–Arithmetic-pow)
и блок сумматора
SummingJunction
(Blocks
–Arithmetic-SummingJunction).
На рисунке 10.3 представлена реализация
блока
используется
блок pow
(Blocks
–Arithmetic-pow)
и блок сумматора
SummingJunction
(Blocks
–Arithmetic-SummingJunction).
На рисунке 10.3 представлена реализация
блока
 .
.
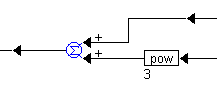


Сигнал с выхода линейной части системы
Рисунок
10.3 – Реализация в VisSim нелинейной
характеристики

Промоделировать систему и сделать выводы об устойчивости.
3. Получение системы дифференциальных уравнений, описывающих нелинейную системы.

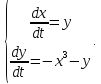
Особая точка – x=0; y=0.
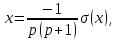
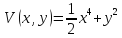
Используя
метод деления переменных получено
выражение для функции Ляпунова V(x,
y)
и
 :
:
 ,
,
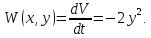
Анализ
полученных функций позволяет сделать
вывод, что V(x,
y)
– знакоопределенная положительная, а
 - знакопостоянная противоположного
знака. Таким образом можно сделать
вывод, что
движение в окрестности рассматриваемой
особой точки асимптотически устойчиво.
- знакопостоянная противоположного
знака. Таким образом можно сделать
вывод, что
движение в окрестности рассматриваемой
особой точки асимптотически устойчиво.
4. Для подтверждения выводов проведем визуальную оценку графиков функций Ляпунова в пространстве с помощью инструмента SurfacePlot в MathCad (рисунок 10.4).
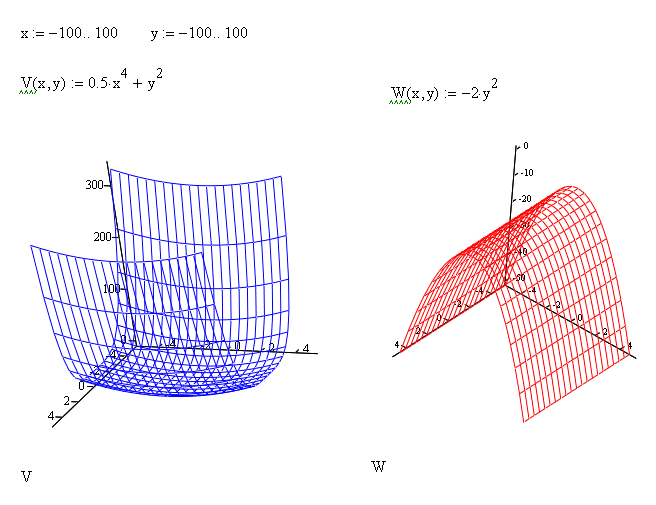
Рисунок 10.4 – Снимок экрана MathCad с графиками функций Ляпунова
10.5 Варианты заданий
Таблица 10.1
|
№ варианту |
Система дослідження |
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
|
|
6 |
|
|
7 |
|
|
8 |
|







