

6.5.6. Процедура синтеза регулятора модальным методом
На основе рассмотренной операторной методики модального метода синтеза можно предложить следующую процедуру расчета регулятора.
-
Проверяются условия разрешимости задачи синтеза для исходного объекта управления.
-
Записывается передаточная функция корректора статики
 .
. -
Выбирается передаточная функция корректора динамики
 ,
где
,
где
 – полином числителя передаточной
функции объекта; n
– порядок объекта;
– полином числителя передаточной
функции объекта; n
– порядок объекта;
 ,
,
 – коэффициенты регулятора, численные
значения которых должны быть определены
в процессе синтеза
– коэффициенты регулятора, численные
значения которых должны быть определены
в процессе синтеза
 .
. -
В соответствии с расчетной структурной схемой (см. рис. 6.13) находится действительное характеристическое уравнение системы, содержащее неизвестные параметры регулятора (6.52).
-
С учетом требований к качеству переходных процессов (
 и
и
 )
формируется желаемое характеристическое
уравнение системы (
)
формируется желаемое характеристическое
уравнение системы ( )-го
порядка в виде (6.56).
)-го
порядка в виде (6.56). -
Приравниваются коэффициенты при соответствующих степенях оператора p желаемого (6.56) и действительного (6.52) характеристических уравнений системы, записываются расчетные соотношения для параметров регулятора (6.57).
-
В случае, когда степени полиномов числителя и знаменателя передаточной функции объекта связаны соотношением
 ,
передаточная функция корректора
динамики содержит в числителе и
знаменателе полиномы одного порядка.
Такой регулятор может быть непосредственно
реализован в виде цепочки интеграторов
с прямыми и обратными связями (п. 3.6.1).
,
передаточная функция корректора
динамики содержит в числителе и
знаменателе полиномы одного порядка.
Такой регулятор может быть непосредственно
реализован в виде цепочки интеграторов
с прямыми и обратными связями (п. 3.6.1). -
В ситуации, когда
 ,
корректор динамики представляет собой
форсирующее звено, для его реализации
в систему следует вводить специальный
фильтр (см. рис. 6.16).
,
корректор динамики представляет собой
форсирующее звено, для его реализации
в систему следует вводить специальный
фильтр (см. рис. 6.16). -
При расчете стабилизирующей добавки
 используется методика модального
метода синтеза. Сначала формируется
желаемое характеристическое уравнение
фильтра так, чтобы процессы в нем
заканчивались на порядок быстрее, чем
в системе (т. е.
используется методика модального
метода синтеза. Сначала формируется
желаемое характеристическое уравнение
фильтра так, чтобы процессы в нем
заканчивались на порядок быстрее, чем
в системе (т. е.
 ).
Приравниваются коэффициенты при
соответствующих степенях оператора
p
полученного желаемого и действительного
(6.59) характеристических уравнений
фильтра, записываются соотношения для
расчета параметров стабилизирующей
добавки.
).
Приравниваются коэффициенты при
соответствующих степенях оператора
p
полученного желаемого и действительного
(6.59) характеристических уравнений
фильтра, записываются соотношения для
расчета параметров стабилизирующей
добавки. -
Параллельная модель
 и стабилизирующая добавка
и стабилизирующая добавка
 реализуются в виде цепочки интеграторов,
из внутренних переменных модели
формируется форсирующий регулятор.
реализуются в виде цепочки интеграторов,
из внутренних переменных модели
формируется форсирующий регулятор.
Пример 6.9
Предложить схемную реализацию регулятора, рассчитанного для объекта с передаточной функцией
![]()
из примера 6.8.
Найденные из условия требуемого качества процессов в замкнутой системе передаточные функции регулятора имеют вид
![]()
![]() ,
,
где
![]()
Как видим, корректор динамики представляет собой форсирующее звено первого порядка, поэтому для его реализации введем в систему стабилизирующую добавку с передаточной функцией
![]() .
.
С учетом передаточной функции модели объекта
![]()
запишем действительное характеристическое уравнение фильтра (6.59) в виде
![]()
или
![]() .
.
Представим это уравнение в стандартной форме
![]()
Сформируем
желаемое характеристическое уравнение
фильтра так, чтобы процессы в нем
заканчивались на порядок быстрее, чем
в системе. При этом выберем
![]()
Поскольку
в системе не допускается перерегулирование,
сохраним это условие и для фильтра.
Таким образом, корни должны быть
вещественными и располагаться на
расстоянии не ближе
![]() от мнимой оси. В результате выберем
следующие корни:
от мнимой оси. В результате выберем
следующие корни:
![]()
Запишем желаемое характеристическое уравнение фильтра
![]()
В результате подстановки численных значений корней получим
![]()
Определим
расчетные соотношения для параметров
стабилизирующей добавки, для чего
приравняем коэффициенты уравнений
![]() и
и
![]() :
:

Отсюда
найдем
![]() .
.
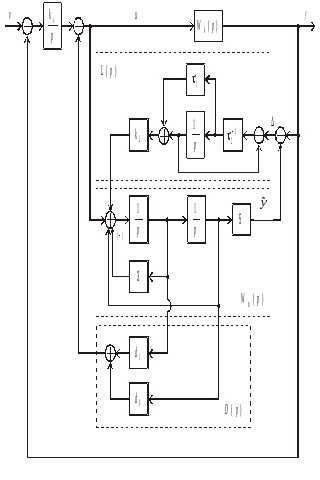 Рис.
6.22. Структурная
схема системы для примера 6.9
Рис.
6.22. Структурная
схема системы для примера 6.9
Таким образом, передаточная функция стабилизирующей добавки имеет вид
![]() .
.
В соответствии с
рекомендациями п. 3.6.1 и структурной
схемой, представленной на рис. 6.21,
приведем на рис. 6.22 полную структурную
схему системы с учетом реализации
регулятора. На схеме пунктиром выделены:
![]() – параллельная модель;
– параллельная модель;
![]() – стабилизирующая добавка;
– стабилизирующая добавка;
![]() – полином числителя корректора динамики.
– полином числителя корректора динамики.