

Государственный комитет Российской Федерации по высшему образованию
Саратовский ордена Трудового Красного Знамени государственный технический университет коррекция динамики следящей системы
Методические указания
к лабораторной работе
по курсу “Теория управления”
для студентов специальности 2101.
Одобрено
редакционно-издательским советом
Саратовского государственного
технического университета.
Саратов 1999
Краткая теория
Работоспособная САУ должна быть устойчивой. При этом коэффициенты уравнения системы должны удовлетворять одному из критериев устойчивости. Если система неустойчива, то, изменяя коэффициеты уравнения, устойчивости можно добиться.
Коэффициенты уравнения определяются физическими параметрами и конструктивными коэффициентами узлов и составных частей системы. В ряде случаев они допускают изменения путем регулировок, настроек, переключений. Однако диапазонов регулировок иногда оказывается недостаточно. Некоторые узлы систем управления регулировок не предусматривают совсем. В этих случаях добиться устойчивости системы
управления изменением коэффициентов не всегда возможно. В подобных ситуациях устойчивости добиваются включением в систему дополнительных элементов (устройств), называемых корректирующими. Корректирующие устройства (КУ) могут включаться в систему по -разному: последовательно, параллельно, встречно – параллельно. Они получают название по способу включения в систему управления.
Система управления может быть устойчива, но показатели качества управления при этом могут быть неудовлетворительными. Задача
улучшения качества управления также может решаться применением корректирующих устройств
ПОСЛЕДОВАТЕЛЬНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО
Варианты включения последовательных корректирующих устройств показаны на рис.1(а, б).


Рис.1
На рис.1а корректирующее звено Wк1 включено после звена W1, являющегося обычно усилителем сигнала рассогласования, а на рис.1б – перед усилителем. Передаточная функция разомкнутой цепи
Wp = W1 W2 W3 Wk1 (1)
одинакова для обоих вариантов. Однако во многих случаях вариант а) предпочтительнее. Причина этого в том, что сигнал рассогласования может быть слабым. Корректирующее устройство для варианта б) слабый сигнал может дополнительно ослабить (ниже уровня шумов). В результате
работоспособность системы может быть нарушена.
Параллельное корректирующее устройство
О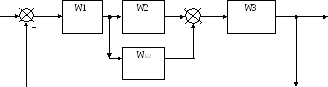 рганизация
параллельного корректирующего устройства
показана на рис.2.
рганизация
параллельного корректирующего устройства
показана на рис.2.
Рис.2
Передаточная функция разомкнутой цепи
Wр = W1 (Wк2+W2) W3 (2)
ВСТРЕЧНО – ПАРАЛЛЕЛЬНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО
Включение такого устройства (Wк3) показано на рис.3.

Рис.3