

методические указания по лабораторной работе / МЕТОД ГАРМОНИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
.docМинистерство образования и науки Российской Федерации
Саратовский государственный технический университет
Балаковский институт техники, технологии и управления
Метод гармонической линеаризации
Методические указания к лабораторной работе по курсу «Теория автоматического управления» для студентов специальности 210100
Одобрено
редакционно –издательским советом
Балаковского интститута техники,
технологии и управления
Балаково 2004
Цель работы: Изучение нелинейных систем с помощью метода гармонической линеаризации (гармонического баланса), определение коэффициентов гармонической линеаризации для различных нелинейных звеньев. Получение навыков по нахождению параметров симметричных колебаний постоянной амплитуды и частоты (автоколебаний), используя алгебраический, частотный способы, а также с помощью критерия Михайлова.
ОСНОВНЫЕ СВЕДЕНИЯ
Метод гармонической линеаризации относится к приближенным методам исследования нелинейных систем. Он позволяет достаточно просто и с приемлемой точностью оценивать устойчивость нелинейных систем, определять частоту и амплитуду установившихся в системе колебаний.
Предполагается, что исследуемая нелинейная САУ может быть представлена в следующем виде
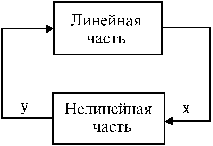
Рис.1.
причем нелинейная часть должна иметь одну нелинейность
![]() .
(1)
.
(1)
Эта нелинейность может быть как непрерывной, так и релейной, однозначной или гистерезисной.
Любую функцию или сигнал можно разложить в ряд по системе линейно-независимых, в частном случае ортонормированных функций. В качестве такого ортогонального ряда может быть использован ряд Фурье.
Разложим в ряд Фурье выходной сигнал нелинейной части системы
![]() ,
(2)
,
(2)
здесь
![]() - коэффициенты Фурье,
- коэффициенты Фурье,
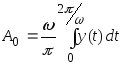 ,
,
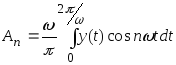 ,
,
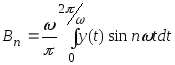 .
(3)
.
(3)
Таким образом,
сигнал
![]() согласно
(2) может быть представлен в виде
бесконечной суммы гармоник с возрастающими
частотами
согласно
(2) может быть представлен в виде
бесконечной суммы гармоник с возрастающими
частотами
![]() и т. д. Этот сигнал поступает на вход
линейной части нелинейной системы.
и т. д. Этот сигнал поступает на вход
линейной части нелинейной системы.
Обозначим передаточную функцию линейной части
![]() ,
(4)
,
(4)
причем степень полинома числителя должна быть меньше степени полинома знаменателя. В этом случае АЧХ линейной части имеет вид
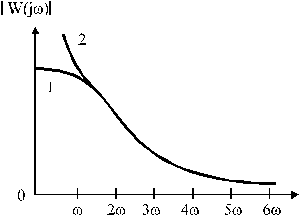
Рис.2.
где 1 -
![]() не имеет полюсов, 2 -
не имеет полюсов, 2 -
![]() имеет полюс или полюса.
имеет полюс или полюса.
Для АЧХ справедливо записать
![]() .
(5)
.
(5)
Таким образом, линейная часть нелинейной системы является фильтром высоких частот. В этом случае линейная часть будет пропускать без ослабления только низкие частоты, высокие же по мере роста частоты будут существенно ослабляться.
В методе гармонической линеаризации делается предположение о том, что линейная часть системы будет пропускать только постоянную составляющую сигнала и первую гармонику. Тогда сигнал на выходе линейной части будет иметь вид
![]() .
(6)
.
(6)
Этот сигнал проходит по всему замкнутому контуру системы Рис.1 и на выходе нелинейного элемента без учета более высоких гармоник, согласно (2) имеем
![]() .
(7)
.
(7)
При исследовании
нелинейных систем с помощью метода
гармонической линеаризации возможны
случаи симметричных и несимметричных
колебаний. Рассмотрим случай симметричных
колебаний. Здесь
![]() и
и![]() .
.
Введем следующие обозначения
![]() ,
,
![]() .
.
Подставив их в
(7), получим
![]() .
(8)
.
(8)
С учетом того, что
![]() ,
,
![]() ,
где
,
где
![]() ,
,
получим
![]() .
(9)
.
(9)
Согласно (3) и (8)
при
![]()
![]() ,
,
![]() .
(10)
.
(10)
Выражение (9)
является гармонической линеаризацией
нелинейности
![]() устанавливает линейную связь входной
переменной
устанавливает линейную связь входной
переменной
![]() и выходной
и выходной
![]() при
при
![]() .
Величины
.
Величины
![]() и
и
![]() называются коэффициентами гармонической
линеаризации.
называются коэффициентами гармонической
линеаризации.
Необходимо
отметить, что уравнение (9) является
линейным для конкретных величин
![]() и
и
![]() (амплитуды и частоты гармонических
колебаний в системе). Но в целом оно
сохраняет нелинейные свойства, так как
коэффициенты различны для различных
(амплитуды и частоты гармонических
колебаний в системе). Но в целом оно
сохраняет нелинейные свойства, так как
коэффициенты различны для различных
![]() и
и
![]() .
Эта особенность и позволяет исследовать
с помощью метода гармонической
линеаризации свойства нелинейных систем
[ Попов Е.П.].
.
Эта особенность и позволяет исследовать
с помощью метода гармонической
линеаризации свойства нелинейных систем
[ Попов Е.П.].
В случае несимметричных колебаний гармоническая линеаризация нелинейности приводит к линейному уравнению
![]() ,
(11)
,
(11)
где
![]() ,
,
![]() ,
,
![]() .
(12)
.
(12)
Так же как и
уравнение (9), линеаризованное уравнение
(11) сохраняет свойства нелинейного
элемента, так как коэффициенты
гармонической линеаризации
![]() ,
,
![]() ,
а так же постоянная составляющая
,
а так же постоянная составляющая
![]() зависят и от смещения
зависят и от смещения
![]() и от амплитуды гармонических колебаний
и от амплитуды гармонических колебаний
![]() .
.
Уравнения (9) и (11) позволяют получить передаточные функции гармонически линеаризованных нелинейных элементов. Так для симметричных колебаний
![]() ,
(13)
,
(13)
при этом частотная передаточная функция
![]() (14)
(14)
зависит только от амплитуды и не зависит от частоты колебаний в системе.
Необходимо отметить,
что если нечетно-симметричная нелинейность
однозначна, то в случае симметричных
колебаний в соответствии с (9) и (10)
получим, что
![]() ,
(15)
,
(15)
так как
![]()
![]() (16)
(16)
и линеаризованная нелинейность имеет вид
![]() .
(17)
.
(17)
Для неоднозначных
нелинейностей (с гистерезисом) интеграл
в выражении (16) не равен нулю, вследствие
различия в поведении кривой
![]() при
возрастании и убывании
при
возрастании и убывании
![]() ,
поэтому справедливо полное выражение
(9).
,
поэтому справедливо полное выражение
(9).
Найдем коэффициенты гармонической линеаризации для некоторых нелинейных характеристик. Пусть нелинейная характеристика имеет вид релейной характеристики с гистерезисом и зоной нечувствительности. Рассмотрим, как гармонические колебания проходят через нелинейный элемент с такой характеристикой.

Рис.3.
При выполнении
условия
![]() ,
то есть если амплитуда входного сигнала
,
то есть если амплитуда входного сигнала
![]() меньше зоны нечувствительности
меньше зоны нечувствительности
![]()
![]() ,
то сигнал на выходе нелинейного элемента
отсутствует. Если же амплитуда
,
то сигнал на выходе нелинейного элемента
отсутствует. Если же амплитуда
![]() ,
то реле переключается в точках A, B, C и
D. Обозначим
,
то реле переключается в точках A, B, C и
D. Обозначим
![]() и
и
![]() .
.
Тогда
![]() ,
,![]()
![]() .
(18)
.
(18)
При вычислении коэффициентов гармонической линеаризации следует иметь ввиду, что при симметричных нелинейных характеристиках интегралы в выражениях (10) находятся на полупериоде (0, ) с последующим увеличением результата в два раза. Таким образом

 ,
,
![]()
 .
(19)
.
(19)
Тогда
![]() ,
,
![]() .
(20)
.
(20)
Для нелинейного элемента с релейной характеристикой и зоной нечувствительности
![]() ,
,
![]() .
(21)
.
(21)
Для нелинейного элемента, имеющего релейную характеристику с гистерезисом
![]() ,
,
![]() .
(21)
.
(21)
Аналогично могут быть получены коэффициенты гармонической линеаризации для других нелинейных характеристик.
Рассмотрим два способа определения симметричных колебаний постоянной амплитуды и частоты (автоколебаний) и устойчивости линеаризованных систем: алгебраический и частотный. Сначала рассмотрим алгебраический способ. Для замкнутой системы Рис.1 передаточная функция линейной части равна
![]() .
.
Запишем гармонически линеаризованную передаточную функцию нелинейной части
![]() .
.
Характеристической уравнение замкнутой системы имеет вид
![]()
![]() .
(22)
.
(22)
Если в исследуемой
системе возникают автоколебания, то
это говорит о наличии двух чисто мнимых
корней в ее характеристическом уравнении.
Поэтому подставим в характеристическое
уравнение (22) значение корня
![]() .
.
![]()
![]() .
(23)
.
(23)
Представим
![]() .
.
Получим два
уравнения, определяющих искомую амплитуду
![]() и частоту
и частоту
![]()
![]() ,
,
![]() .
(24)
.
(24)
Если в решении
возможны вещественные положительные
значения амплитуды
![]() и частоты
и частоты
![]() ,
то в системе могут возникнуть автоколебания.
Если же амплитуда
,
то в системе могут возникнуть автоколебания.
Если же амплитуда
![]() и частота
и частота
![]() не имеет положительных значений, то
автоколебания в системе невозможны.
не имеет положительных значений, то
автоколебания в системе невозможны.
Рассмотрим пример 1. Пусть исследуемая нелинейная система имеет вид

Рис.4.
В этом примере нелинейный элемент представляет собой чувствительный элемент с релейной характеристикой, для которого коэффициенты гармонической линеаризации
![]() ,
,
![]() .
(25)
.
(25)
Исполнительное устройство имеет передаточную функцию вида
![]() .
(26)
.
(26)
Передаточная функция объекта регулирования равна
![]() .
(27)
.
(27)
Передаточная функция линейной части системы
![]() ,
(28)
,
(28)
где
![]() .
.
На основании (22), (25) и (28) запишем характеристическое уравнение замкнутой системы
![]() ,
(29)
,
(29)
откуда
![]() ,
,
![]() .
(30)
.
(30)
Пусть
![]() 1/сек,
1/сек,
![]() сек,
сек,
![]() сек,
сек,
![]() в.
в.
В этом случае параметры периодического движения равны
![]() 7,071
7,071
![]() ,
,
![]() в.
в.
Рассмотрим способ определения параметров автоколебаний в линеаризованной САУ с помощью критерия Михайлова. Способ основан на том, что при возникновении автоколебаний система будет находиться на границе устойчивости и годограф Михайлова в этом случае будет проходить через начало координат.
В примере 2 найдем параметры автоколебаний при том условии, что нелинейный элемент в системе Рис.4 представляет собой чувствительный элемент, имеющий релейную характеристику с гистерезисом, для которого коэффициенты гармонической линеаризации
![]() ,
,
![]() .
.
Линейная часть осталась неизменной.
Запишем характеристическое уравнение замкнутой системы
 .
.
Годограф Михайлова
получается заменой
![]() .
.
 .
.
Задача заключается
в том, чтобы подобрать такую амплитуду
колебаний
![]() ,
при которой годограф пройдет через
начало координат. Необходимо отметить,
что при этом текущая частота
,
при которой годограф пройдет через
начало координат. Необходимо отметить,
что при этом текущая частота
![]() ,
так как именно в этом случае кривая
пройдет через начало координат.
,
так как именно в этом случае кривая
пройдет через начало координат.
Расчеты, проведенные
в MATHCAD 7 при
![]() 1/сек,
1/сек,
![]() сек,
сек,
![]() сек,
сек,
![]() в
и
в
и
![]() в,
дали следующие результаты. На Рис.5
годограф Михайлова проходит через
начало координат. Для повышения точности
расчетов увеличим нужный фрагмент
графика. На Рис.6 приведен фрагмент
годографа, увеличенный в окрестности
начала координат. Кривая проходит через
начало координат при
в,
дали следующие результаты. На Рис.5
годограф Михайлова проходит через
начало координат. Для повышения точности
расчетов увеличим нужный фрагмент
графика. На Рис.6 приведен фрагмент
годографа, увеличенный в окрестности
начала координат. Кривая проходит через
начало координат при
![]() в.
в.
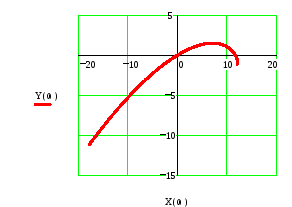
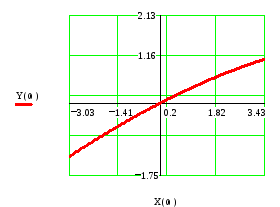
Рис.5. Рис.6.
Частоту колебаний
при этом можно найти из условия равенства
нулю модуля
![]() .
Для частот
.
Для частот
![]()
значения модуля сведены в таблицу
![]()
Таким образом,
частота колебаний
![]() 6,38
6,38
![]() .
Необходимо отметить, что точность
расчетов легко может быть увеличена.
.
Необходимо отметить, что точность
расчетов легко может быть увеличена.
Полученное
периодическое решение, определяемое
значением амплитуды
![]() и частоты
и частоты
![]() ,
необходимо исследовать на устойчивость.
Если решение устойчиво, то в системе
имеет место автоколебательный процесс
(устойчивый предельный цикл). В противном
случае предельный цикл будет неустойчивым.
,
необходимо исследовать на устойчивость.
Если решение устойчиво, то в системе
имеет место автоколебательный процесс
(устойчивый предельный цикл). В противном
случае предельный цикл будет неустойчивым.
Проще всего для
исследования устойчивости периодического
решения использовать критерий устойчивости
Михайлова в графическом виде. Было
установлено, что при
![]() кривая Михайлова проходит через начало
координат. Если дать
кривая Михайлова проходит через начало
координат. Если дать
![]() малое приращение
малое приращение
![]() ,
то кривая займет положение либо выше
нуля, либо ниже. Так в последнем примере
дадим приращение
,
то кривая займет положение либо выше
нуля, либо ниже. Так в последнем примере
дадим приращение
![]() в, то есть
в, то есть
![]() и
и
![]() .
Положение кривых Михайлова показано
на Рис.7.
.
Положение кривых Михайлова показано
на Рис.7.
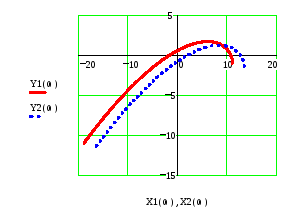
Рис.7.
При
![]() кривая проходит выше нуля, что говорит
об устойчивости системы и затухающем
переходном процессе. При
кривая проходит выше нуля, что говорит
об устойчивости системы и затухающем
переходном процессе. При
![]() кривая Михайлова проходит ниже нуля,
система является неустойчивой и
переходный процесс является расходящимся.
Таким образом периодическое решение с
амплитудой
кривая Михайлова проходит ниже нуля,
система является неустойчивой и
переходный процесс является расходящимся.
Таким образом периодическое решение с
амплитудой
![]() в
и частотой колебаний
в
и частотой колебаний
![]() 6,38
6,38
![]() устойчиво.
устойчиво.
Для исследования
устойчивости периодического решения
может быть использован и аналитический
критерий, получаемый из графического
критерия Михайлова. Действительно,
чтобы узнать пойдет ли кривая Михайлова
при
![]() выше нуля достаточно посмотреть, куда
будет перемещаться точка кривой
Михайлова, которая при
выше нуля достаточно посмотреть, куда
будет перемещаться точка кривой
Михайлова, которая при
![]() находится в начале координат.
находится в начале координат.
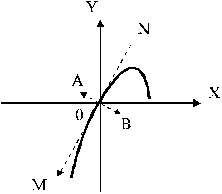
Рис.8.
Если разложить перемещение этой точки по координатным осям X и Y, то для устойчивости периодического решения вектор, определяемый проекциями на координатные оси
![]() и
и
![]() ,
,
должен быть
расположен справа от касательной MN к
кривой Михайлова, если смотреть вдоль
кривой в сторону возрастания
![]() ,
направление которой определяется
проекциями
,
направление которой определяется
проекциями
![]() и
и
![]() .
.
Аналитическое условие устойчивости запишем в следующем виде
![]()
![]()
![]()
![]() .
(31)
.
(31)
В этом выражении
частные производные берутся по текущему
параметру
![]() кривой Михайлова
кривой Михайлова
![]()
![]() ,
,
в точке
![]() .
.
Необходимо отметить, что аналитическое выражение критерия устойчивости (31) справедливо только для систем не выше четвертого порядка, так как например для системы пятого порядка в начале координат условие (31) может выполняться, а система будет неустойчивой
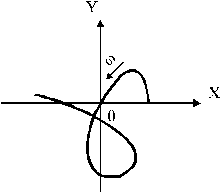
Рис.9.
Применим критерий (31) для исследования устойчивости периодического решения, полученного в примере 1.
Так как
![]() ,
,
![]() ,
,
то
![]() ,
,
![]() ,
,