

-
Датчик эдс на базе тахометрического моста
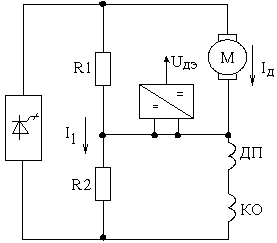
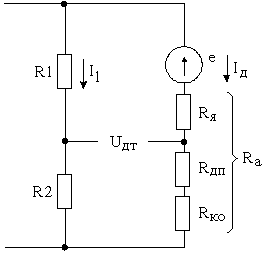
Датчик ЭДС на базе тахометрического моста представлен на рисунке 3.76а, где приняты обозначения: КО – компенсационная обмотка; ДП – дополнительные полюса.
Если
![]() ,
то Uдэ
е (см. рисунок 3.76б).
,
то Uдэ
е (см. рисунок 3.76б).
а)
б) Рисунок
3.76
Достоинство: простота схемы.
Недостатки:
- температурная нестабильность датчика, вызванная разной величиной тока, протекающего по силовой схеме и схеме делителя и разными условиями охлаждения (погрешность 710%);
- плохая точность датчика в переходных режимах, где проявляется влияние индуктивности силовой цепи двигателя.
Схема с учетом индуктивности представлена на рисунке 3.77.
Рисунок
3.77
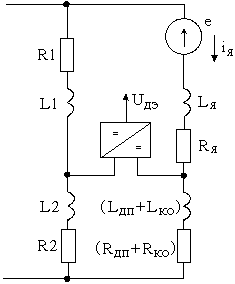
Чтобы
Uдэ
е, надо
![]() .
.
Таким
образом, требуется чтобы
![]() .
.
Такое соотношение не всегда выполняется, поэтому включают дополнительные индуктивности L1 и L2, тогда имеем баланс по активному и индуктивному сопротивлению.
![]() .
.
Но это усложняет схему, поэтому выбирают простоту (т.е. без L1 и L2).
Передаточная функция датчика эдс
Wдэ(р) = Кдэ.
Датчики этого типа применяют в роботах и манипуляторах.
-
Датчик эдс с применением дн и дт
Датчик ЭДС с применением ДН и ДТ представлен на рисунке 3.78, где приняты обозначения: Ф – фильтр; Uтк – сигнал токовой компенсации.
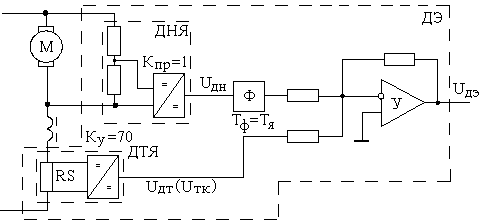 Рисунок
3.78
Рисунок
3.78
![]() .
.
В соответствии со схемой замещения цепи, представленной на рисунке 3.79, можно записать уравнения
![]() ;
;
Рисунок
3.79

 Необходимость
включения фильтра на выходе ДН вызвана
тем, чтобы исключить из выходного сигнала
датчика составляющую пропорциональную
падению напряжения на индуктивности
Lя, в
независимости от источника. В этом
случае для получения на выходе усилителя
сигнала датчика ЭДС необходимо из
сигнала на выходе фильтра вычесть сигнал
токовой компенсации Uтк
iRя.
Необходимость
включения фильтра на выходе ДН вызвана
тем, чтобы исключить из выходного сигнала
датчика составляющую пропорциональную
падению напряжения на индуктивности
Lя, в
независимости от источника. В этом
случае для получения на выходе усилителя
сигнала датчика ЭДС необходимо из
сигнала на выходе фильтра вычесть сигнал
токовой компенсации Uтк
iRя.
![]() ;
;
![]() ,
,
где Тф = Тяц = Lяц / Rяц – постоянная времени того участка цепи, к которому подключен ДН.
-
Датчики положения
а) аналоговые ДП
1) потенциометрические;
2) сельсинные (n-отсчетные).
Wдп = Кдп.
б) импульсные, использующие перфорированный диск (применяются в цифровых АЭП, микропроцессорных системах).
-
Датчики потока
Применяются в двухзонных ЭП.
-
Датчик потока на базе элемента Холла
Обеспечивает прямое (непосредственное) изменение потока и устанавливается прямо в конструкции электрической машины.
Передаточная функция датчика потока
Wдп(р) = Кдп.
-
Датчик потока с применением датчика тока возбуждения
-
Задатчики регулируемых величин
Задатчики регулируемых величин предназначены для ввода задающих сигналов.
При ручном вводе задания используются:
а) потенциометрические задатчики;
б) сельсинные задатчики.
-
Потенциометрический задатчик с плавным изменением задающего сигнала
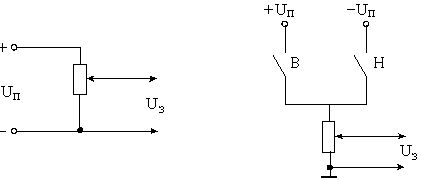
Потенциометрический задатчик с плавным изменением задающего сигнала в реверсивном и нереверсивном электроприводах представлен на рисунке 3.80.
Рисунок
3.80
-
Потенциометрический задатчик с дискретным изменением задающего сигнала
Потенциометрический задатчик с дискретным изменением задающего сигнала представлен на рисунке 3.81, где приняты обозначения: S – галетный переключатель; R1Rn – запаянные сопротивления.
Источники питания задающих устройств должны иметь хорошую стабилизацию.
Рисунок
3.81
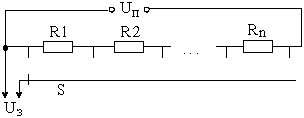
В случае линейной шкалы все сопротивления одинаковы, для нелинейной шкалы справедливо соотношение:
![]() =
1,11,3.
=
1,11,3.
Достоинство нелинейной шкалы – изменение регулируемой величины на каждой ступени будет отличаться в одно и тоже значение.
Таблица 3.1 Ступени нелинейной шкалы при диапазоне Д 11000
-
q
1.1
1.3
1.5
-
N
74
28
18
-
Примечание – N – количество положений.