

РГР / kontrolnaya_rabota_po_oau_4_5_mufazalov_d_f / Задание на рас4-5о
.doc
САУ №4
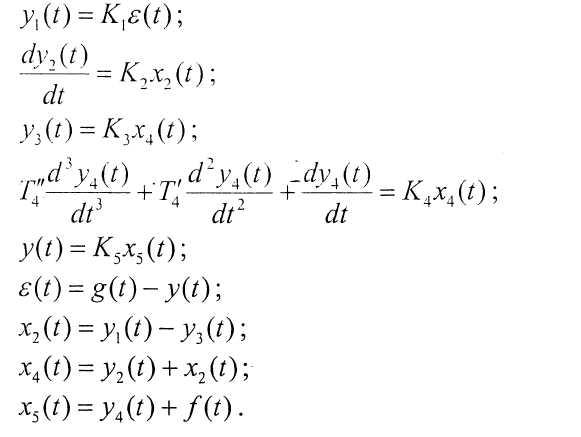
Система управления описывается совокупностью уравнений (4)
Известные параметры системы управления приведены в таблице ниже. Таблица 4 - Параметры САУ
|
№ |
K2 |
K3 |
K4 |
|
|
K5 |
|
5 |
8 |
1.7 |
3.0 |
0.076 |
0.036 |
5.4 |
1. Составить структурную схему системы управления по заданной совокупности уравнений.
Составим по дифференциальным уравнениям передаточные функции звеньев
W1(p)=k1
W2(p)=k2/p
W3(p)=k3
W4(p)=k4/(t4’’p3+t4’p2+p)
W5(p)=k5
И структурную схему системы
(рис. 1)
-
Определить передаточные функции замкнутой системы по задающему воздействию, по возмущению, по ошибке.
При оформлении передаточные функции записывать в виде дроби
Составим передаточную функцию замкнутой системы по задающему воздействию:
Фg(p)= WПр(p)/(1+WПр(p))
WПр(p)=W1(p)*W23(p)*W4(p)*W5(p)
W23(p)=(W2(p)+1)/(1+(1+W2(p))*W3(p))
W23(p)=(p+k2)/(k3p+k2*k3+1)
WПр(p)=k1*(p+k2)*k4*k5/(k3*p+k2*k3+1)/(t4’’p3+t4’p2+p)
k1*k4*k5*(p+k2)
Ф(p)=------------------------------------------------------------------ (1)
(k1*k4*k5(p+k2)+(k3*p+k2*k3+1)(t4’’p3+t4’p2+p))
Составим передаточную функцию замкнутой системы , по возмущению:
Фf(p)=W5(p)/(1+ WПр(p))
k5*(k3*p+k2*k3+1)*(t4’’p3+t4’p2+p)
Фf(p)=------------------------------------------------------------------
( k1*k4*k5(p+k2)+(k3*p+k2*k3+1)(t4’’p3+t4’p2+p))
Составим передаточную функцию замкнутой системы, по ошибке:
Фе(p)=1/(1+ WПр(p))
(k3*p+k2*k3+1)(t4’’p3+t4’p2+p)
Фе(p)=_________________________________________
(k1*k4*k5(p+k2)+ (k3*p+k2*k3+1)(t4’’p3+t4’p2+p))
-
Построить область устойчивости замкнутой системы методом D-разбиения по неизвестному коэффициенту усиления. Выбрать значение этого коэффициента, исходя из условия устойчивости.
Из (1) выразим характеристический полином замкнутой системы
D(p)=(k1*k4*k5(p+k2)+(k3*p+k2*k3+1)(t4’’p3+t4’p2+p))
Из уравнения D(p)=0 выразим неизвестный коэффициент
k1= –(k3*p+k2*k3+1)(t4’’p3+t4’p2+p))/ k5/k4/(p+k2)
перейдем в частотную область p=jω
k1(ω)= ––(k3* jω +k2*k3+1)(t4’’(jω)3+t4’(jω)2+ jω))/ k5/k4/(jω+k2)
k1(w)=0.0617*(-1.7*i*w-14.6)*(-0.0760*i*w^3- 0.036*w^2+i*w)/(i*w+8)
выделим мнимую и действительную части x(w) и y(w) и построим график y(x)
Рис(2)
Выделим на графике область устойчивости и выберем вней значние коэффициента к1.
K1=0,025
-
Оценить устойчивость разомкнутой системы регулирования по критерию Гурвица.
Подставим полученное значение в (1).
Получим
0.405 s + 3.24
Ф(p)=-----------------------------------------------------------------------
0.2052 s^4 + 1.131 s^3 + 3.19 s^2 + 14 s + 3.24
-------------------------------------------------
составим определитель Гурвица И НАЙДЕМ ЕГО значение

 1.1308
14.0050 0 0
1.1308
14.0050 0 0
0.2052 3.1896 3.2400 0
0 1.1308 14.0050 0 = 19.8362>0
0 0.2052 3.1896 3.2400
Н айдем
значения его главнодиагональных миноров.
айдем
значения его главнодиагональных миноров.

1.1308 14.0050 0
0.2052 3.1896 3.2400 = 6.1223>0
0 1.1308 14.0050


1.1308 14.0050
0.2052 3.1896 = 0.7330>0
Определитель Гурвица и все его главнодиагональные миноры положительны, следовательно, по критерию Гурвица система устойчива.
-
Исследовать на устойчивость замкнутую систему управления, используя критерии Михайлова и Найквиста.
Рассмотрим характеристический полином замкнутой системы в частотной области и построим годограф Михайлова
D(s)=0.2052 s^4 + 1.131 s^3 + 3.19 s^2 + 14 s + 3.24
Рис3
Из рисунка видно, что годограф Михайлова проходит через 4 квадранта. порядок системы равен 4, поэтому система по критерию Михайлова устойчива.
Рассмотрим в частотной области передаточную функцию разомкнутой системы
0.405 s + 3.24
Wраз(p)= ------------------------------------------------------------
0.2052 s^4 + 1.131 s^3 + 3.19 s^2 + 13.6 s
и построим годограф Найквиста
рис 4
годограф Найквиста не охватывает точку (-1, 0j), поэтому замкнутая система устойчива.
5.
Построить логарифмические частотные характеристики разомкнутой системы и определить запасы устойчивости по амплитуде и фазе.
Рис 5.
И определим по ней запасы устойчивости: по фазе 88,5 градусов, по амплитуда 6.9 дб.
-
Найти коэффициенты ошибок замкнутой системы.
Передаточная функция замкнутой системы по ошибке имеет вид
0.2052 s^4 + 1.131 s^3 + 3.19 s^2 + 13.6 s Q(p)
Фе(p)=----------------------------------------------------------------------------=-----------------------------
0.2052 s^4 + 1.131 s^3 + 3.19 s^2 + 14 s + 3.24 R(p)
Найдем коэффициенты ошибок
С0= Фе(0)=0
С1=(Q’(0)R(0)-Q(0)R’(0))/R(0)/R(0)=(3.19*3.24)/3.24/3.24= 0.9846
8. Построить переходную характеристику системы и определить показатели качества управления.
С помощью оператора step построим переходную функцию замкнутой системы
Рис 6.
Показатели качества: время регулирования 16.6 с, перерегулирование отсутствует, установившееся значение 1, перерегулирование 0,0382 %
Листинг программы:
clc
clear
k2=8
k3=1.7
k4=3
k5=5.4
t4=0.076
t5=0.036
%выражение для коэффициента
syms w p
p=1i*w;
k1=-(k3*p+k2*k3+1).*(t4*p.^3+t5*p.^2 +p)/ k5/k4./(p+k2)
%изменение частоты
w=-5:0.015:5;
%построение графика
p=1i*w;
k1=-(k3*p+k2*k3+1).*(t4*p.^3+t5*p.^2 +p)/ k5/k4./(p+k2);
plot(real(k1),imag(k1),'LineWidth',2), grid
%выбираем хначение к1
k1=0.025
%описываем ПФ звеньев
w1=tf(k1)
w2=tf(k2,[1 0])
w3=k3
w4=tf(k4,[t4 t5 1 0])
w5=k5
w23=feedback(w2+1,w3)
%ПФ разомкнутой системы
WR=w1*w23*w4*w5;
%ПФ замкнтуой системы
W=feedback(WR,1)
figure(4)
step(W)
%криетрий гурвица
a=W.den{1}
d4=[a(2) a( 4) 0 0 ; a(1) a(3) a(5) 0 ; 0 a(2) a(4) 0; 0 a(1) a(3) a(5) ]
det(d4)
d3=d4(1:3,1:3)
det(d3)
d2=d3(1:2,1:2)
det(d2)
d1=d2(1:1,1:1)
det(d1)
b=W.den{1};
%критерий Михайлова
w=0:0.01:4;
p=1j*w;
M=polyval(b,p);
figure(2)
plot(real(M),imag(M)),grid
%критерий Найквиста
WR
w=0:0.01:10;
p=1j*w;
M1=polyval(WR.num{1},p)./polyval(WR.den{1},p);
figure(3)
plot(real(M1),imag(M1)),grid
%ЛАХ ЛФХ
figure(5)
margin(WR)
%коэф ошибок
We=1/(1+WR)