

Санкт-Петербургский Государственный Университет Информационных Технологий, Механики и Оптики
Кафедра Систем Управления и Информатики
Расчетно-исследовательская работа
«ИССЛЕДОВАНИЕ ПАРАМЕТРИЧЕСКОЙ ЧУВСТВИТЕЛЬНОСТИ ОБЪЕКТОВ И СИСТЕМ, СИНТЕЗ НЕАДАПТИВНЫХ И АДАПТИВНЫХ АЛГОРИТМОВ, ОБЕСПЕЧИВАЮЩИХ НЕОБХОДИМУЮ РОБАСТНОСТЬ ИХ ДИНАМИЧЕСКИХ ПОКАЗАТЕЛЕЙ»
по курсу «Адаптивное и робастное управление»
Вариант 10: А-А-В-В-А-А-А-А
|
Выполнила: |
Студентка гр. 5145 Нибилица А.Ю.
|
|
Преподаватель: |
Слита О.В. |
Санкт-Петербург
2010 г.
Содержание
Введение. Постановка задачи……………………………………………………. 3
-
Построение МТЧ НОУ и результаты ее исследования…………………. 3
-
Построение МТЧ ДОУ и результаты ее исследования………………..... 6
-
Построение МТЧ СНС и результаты ее исследования…………………. 8
-
Построение МФМЧ и результаты ее исследования……………………. 15
-
Построение медианного МУ НОУ и оценка его результатов…………. 17
-
Синтез неадаптивного управления, обеспечивающего параметрическую инвариантность выхода СНС относительно неопределенности НОУ... 21
Заключение………………………………………………………………………. 22
Литература……………………………………………………………………….. 23
Введение. Постановка задачи
Дана передаточная функция «вход-выход» (ВВ) непрерывного объекта управления (НОУ):
![]() ,
,
![]() ,
,
где
![]() .
.
-
Построение мтч ноу и результаты ее исследования
Передаточная функция вход-выход НОУ:
![]()
Перейдем к канонической управляемой форме:

Для перехода к канонической управляемой форме воспользуемся формулами:
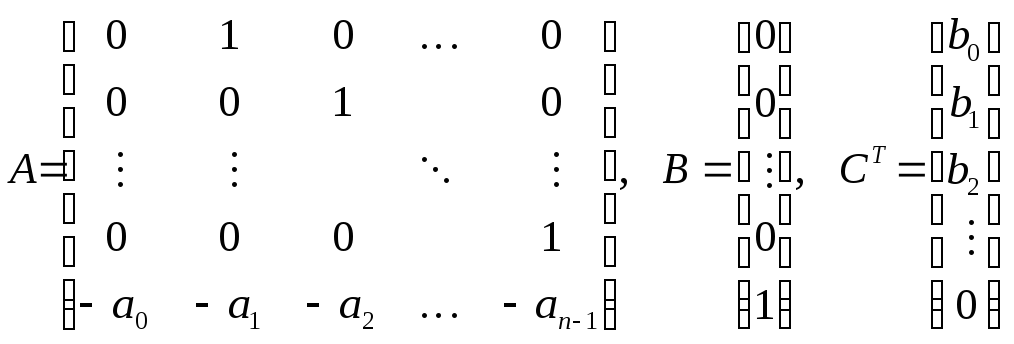
![]() - представление
НОУ:
- представление
НОУ:
 ,
,
![]() ,
,
 .
.
Матрицы номинального ОУ:
![]() ,
,
![]() ,
,
![]() .
.
Построение семейства моделей траекторной чувствительности:
![]()
Где
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
и формирование семейства агрегированных систем:
![]()
где
![]() ,
,
 ,
,
 ,
,
![]() .
.
Получим:
![]() ,
,
![]() ,
,
 ,
,
![]() ;
;
![]() ,
,
![]() ,
,
 ,
,
![]() ;
;
![]() ,
,
![]() ,
,
 ,
,
![]() ;
;
![]() ,
,
![]() ,
,
 ,
,
![]() ;
;
![]() ,
,
![]() ,
,
 ,
,
![]() ;
;
![]() ,
,
![]() ,
,
 ,
,
![]() ;
;
Вычислим матрицы управляемости по функции траекторной чувствительности и их абсолютные нормы:
![]() ,
,
![]()
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
В силу неравенства:
![]()
![]()
![]()
проранжируем параметры по потенциальной чувствительности:
![]() .
.
То есть соответствующие сингулярные числа являются показателями того, на какое из дополнительных движений необходимо затратить большее управление для его асимптотической сходимости к нулю, таким образом чем больше сингулярное число, тем меньше затраты на управление для асимптотической сходимости дополнительного движения к нулю; верно и обратное.
-
Построение мтч доу и результаты ее исследования
Дан интервал
дискретности
![]() и
передаточная функция ОУ:
и
передаточная функция ОУ:

Переход к дискретному описанию ОУ осуществляется методом замены переменной разностью конечных малых, где производные заменяются по формулам:
![]()
тогда

В конической управляемой форме матрицы ДОУ модели «Вход-Состояние-Выход» примут вид:

![]() ,
,
 .
.
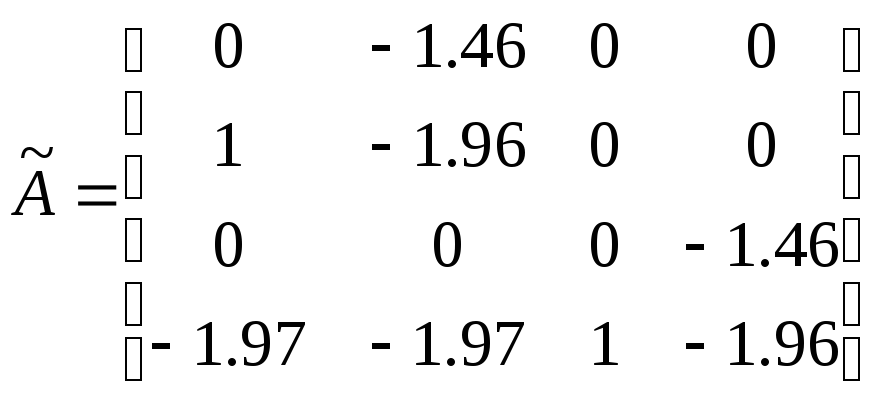
Таким образом матрицы номинального дискретного ОУ примут вид:
![]() .
.
Построим модель траекторной чувствительности к вариации интервала дискретности:
![]()
где ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
При условии, что qj=0, j=(1,p), (1+qp+1)=∆t – вариация интервала дискретности:
![]()
![]()
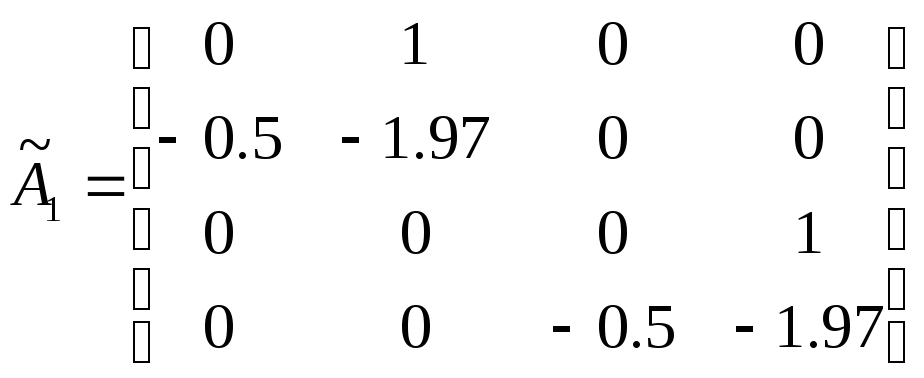
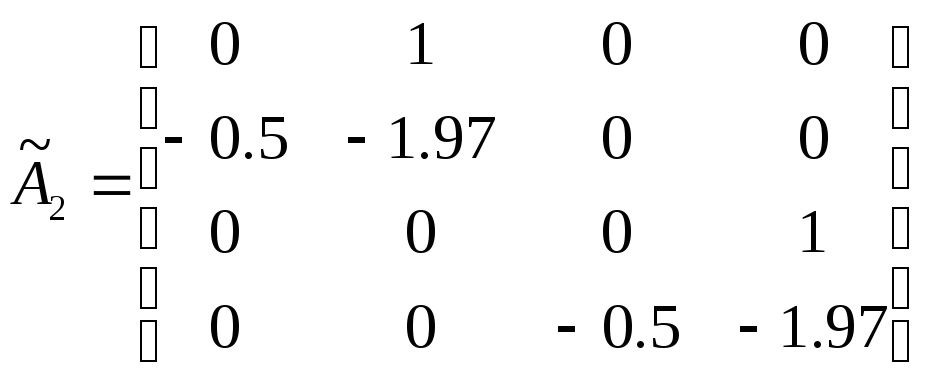
Построим агрегированный ОУ:
![]()
где
![]() ,
,
![]() ,
,
![]() .
.
Получим:
 ,
,
 ,
,
![]()
-
Построение мтч снс и результаты ее исследования
З акон
управления (ЗУ):
акон
управления (ЗУ):
![]() должен доставлять системе
должен доставлять системе
образованной объединением НОУ и ЗУ, с помощью:
- матрицы
![]() прямой связи по входу
прямой связи по входу
![]() равенство входа
равенство входа
![]() и выхода
и выхода
![]() в неподвижном состоянии при номинальных
значениях параметров;
в неподвижном состоянии при номинальных
значениях параметров;
-![]() матрицы
матрицы
![]() обратной связи по состоянию
обратной связи по состоянию
![]() при номинальных значениях параметров
распределение мод Баттерворта с
характеристической частотой .
при номинальных значениях параметров
распределение мод Баттерворта с
характеристической частотой .
Необходимо построить
МТЧ спроектированной системы по каждому
из параметров и для значения
![]() выделить доминирующие параметры по
степени их влияния на величину
выделить доминирующие параметры по
степени их влияния на величину
![]() перерегулирования и длительность
перерегулирования и длительность
![]() переходного процесса.
переходного процесса.
Необходимо построить матрицу функций модальной чувствительности и выделить неблагоприятное сочетание вариаций параметров.
Имеем представление системы в канонической наблюдаемой форме «ВСВ»:
 ,
,
![]() ,
,

Для построения
матрицы
![]() обратной связи по состоянию
обратной связи по состоянию
![]() при номинальных значениях параметров
используем полином Баттерворта 2го
порядка:
при номинальных значениях параметров
используем полином Баттерворта 2го
порядка:
![]()
Из требований к
проектируемой системе найдем матрицы
![]() .
.
Сформируем
характеристический полином:
![]() ,
на основе которого определим матрицу
состояния желаемой системы:
,
на основе которого определим матрицу
состояния желаемой системы:
![]()
Матрицу выхода находим на основе наблюдаемости пары (Г,Н): Н= [0 1].
Найдем матрицу преобразований из решения матричного уравнения Сильвестра: MГ–AM= –BН
![]()
тогда K=НM-1 K=[ -8.5 2.272]
Найдем
![]() :
:
![]() ,
,


![]()
Учитывая,
что
![]() ,
найдем
,
найдем
![]() :
:
 .
.
Найдем
![]() :
:
![]() ,
, ![]()
Рассчитаем передаточную функцию системы.
Переходная функция такой системы представлена на рисунке 3.1
1![]()
![]()
![]()

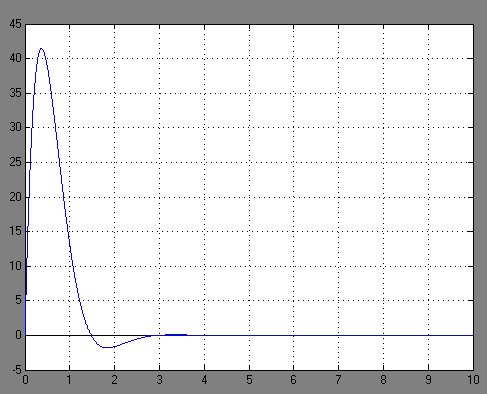
Рисунок 3.1 – Переходная функция СУ
Определим по графику на рисунке 3.1 установившееся значение: yу= 30.3.
Построение семейства моделей траекторной чувствительности:
![]()
где
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Получим:
![]() :
: ![]() ,
,
![]() ,
,
![]() ,
,
![]() :
: ![]() ,
,
![]() ,
,
![]() ,
,
![]() :
: ![]() ,
,
![]() ,
,
![]() ,
,
![]() :
: ![]() ,
,
![]() ,
,
![]() ,
,
![]() :
: ![]() ,
,
![]() ,
,
![]() ,
,
![]() :
: ![]() ,
,
![]() ,
,
![]() .
.
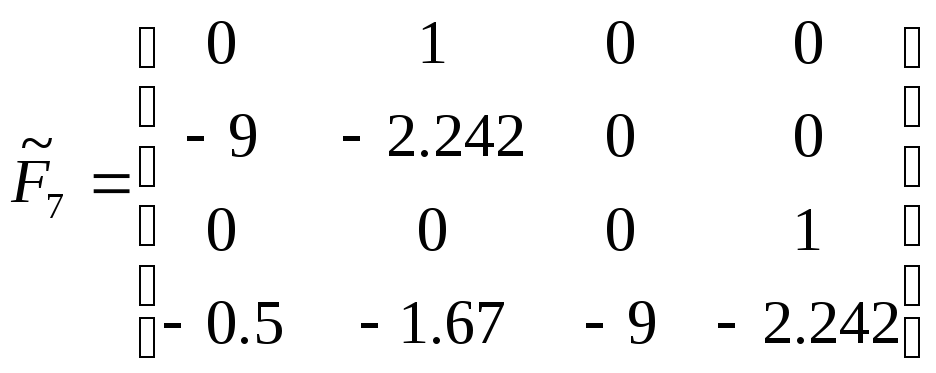
Формирование семейства агрегированных систем:
![]()
где
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
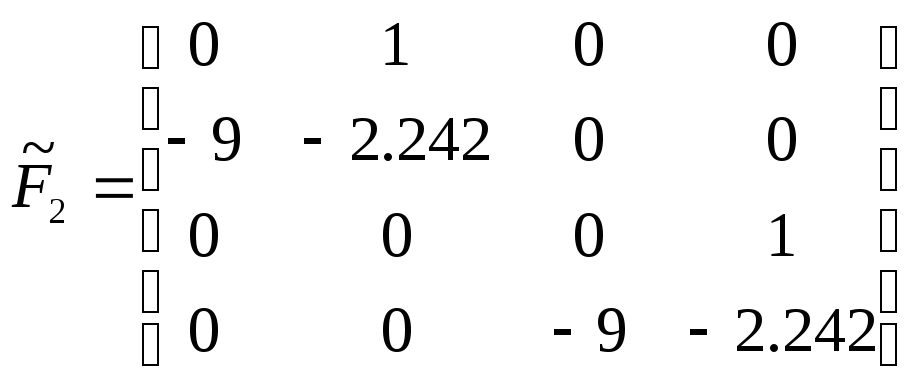
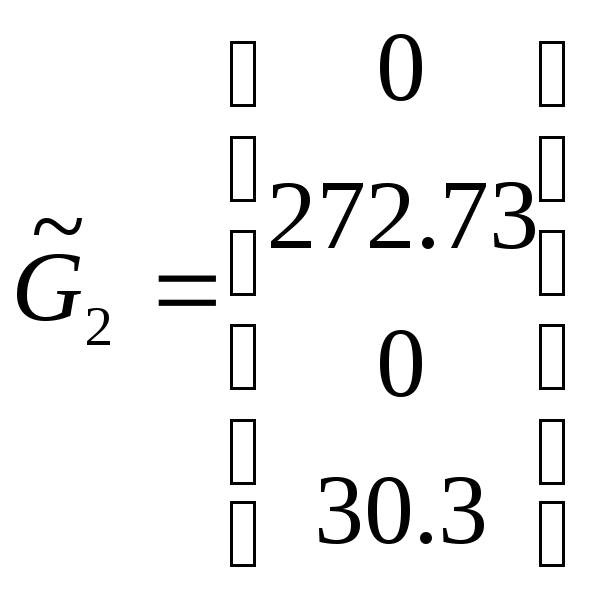
Получим:
![]() :
:  ,
,
 ,
,
![]() ,
,
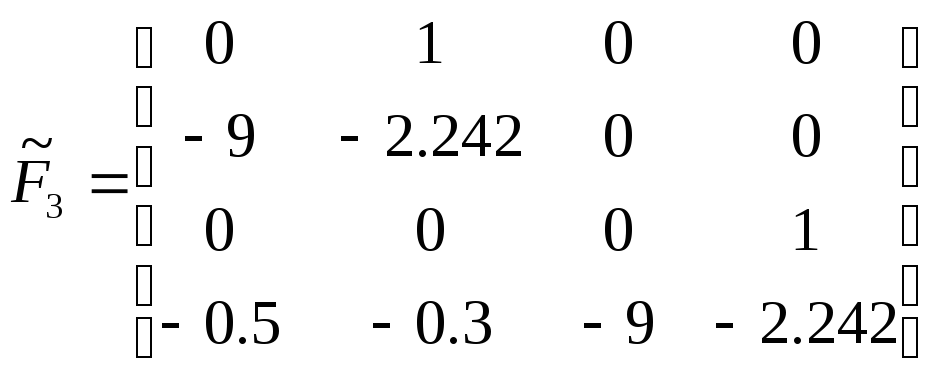
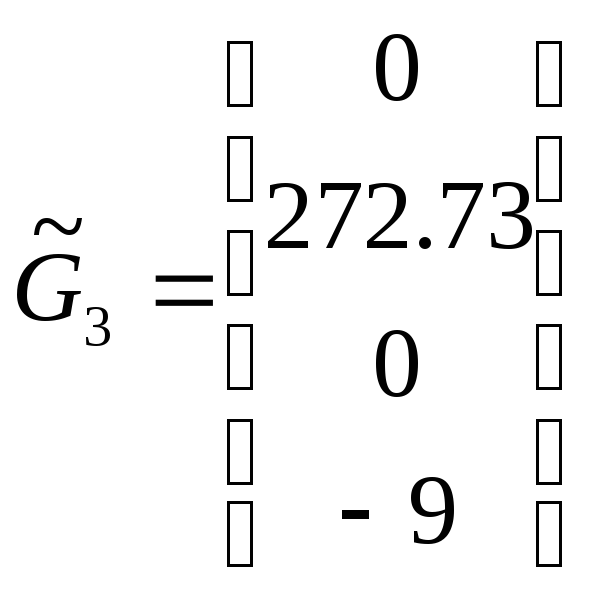
![]() :
:  ,
,
 ,
,
![]() ,
,
![]() :
:  ,
,
 ,
,![]() ,
,
![]() :
:  ,
,
 ,
,
![]() ,
,
![]() :
:  ,
,
 ,
,
![]() ,
,
![]() :
:  ,
,
 ,
,
![]() .
.
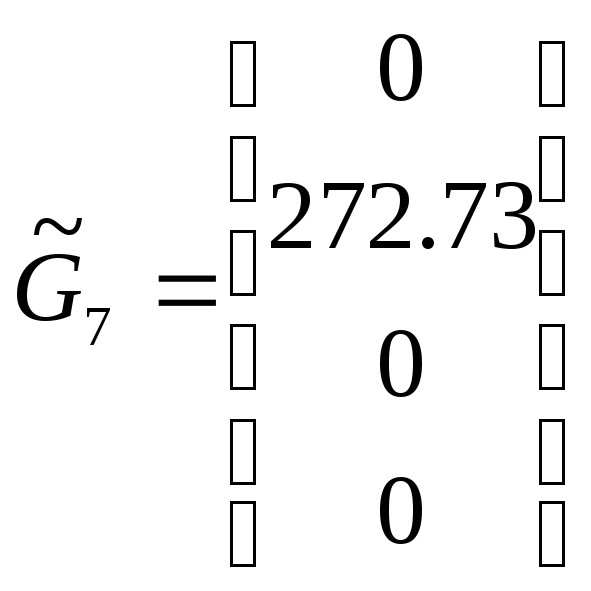
На рисунке 3.2 представлена структурная схема агрегированной системы: номинального объекта управления и модели траекторной чувствительности к вариации одного из параметров.
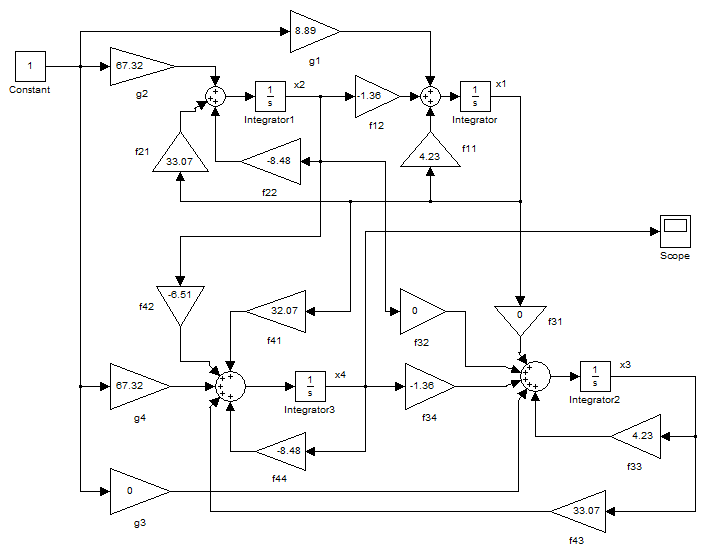
Рисунок 3.2 – Структурная схема агрегированной системы
На следующих
рисунках представлены графики переходных
функций номинальной системы и
параметрически возмущенной, где yн(t)
– функция выхода номинальной системы,
а yв(t,q)
– функция выхода возмущенной системы
при
![]() и
и
![]() .
.

![]()
![]()
![]()
![]()
![]()


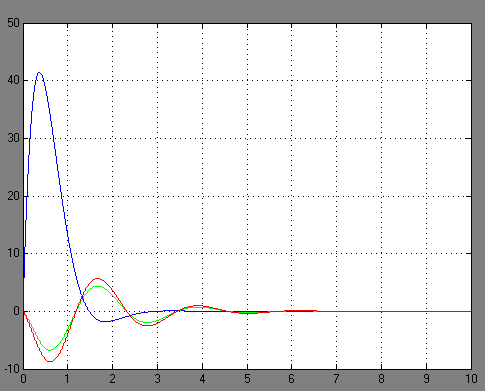
Рисунок 3.3 – Переходные функции системы
при
![]() и
и
![]()
Определим по графику на рисунке 3.3 установившееся и максимальное значения возмущенной системы: yу=0 и уmax=2.4; и определим в процентах разницу между значением выходной переменной номинальной системы и системы с возмущением
![]()
![]()
![]()
![]()
![]()
![]()


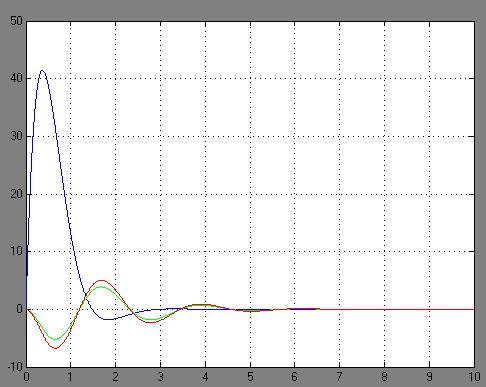
Рисунок 3.4 – Переходные функции системы
при
![]() и
и
![]() .
.
Определим по графику на рисунке 3.4 установившееся и максимальное значения возмущенной системы: yу=0 и уmax=7.5; и определим в процентах разницу между значением выходной переменной номинальной системы и системы с возмущением
![]()
![]()
![]()
![]()
![]()
![]()


Рисунок 3.5 – Переходные функции системы
при
![]() и
и
![]() .
.
Определим по графику на рисунке 3.5 установившееся и максимальное значения возмущенной системы: yу=0 и уmax=|-8.8|; и определим в процентах разницу между значением выходной переменной номинальной системы и системы с возмущением
![]()
![]()
![]()
![]()
![]()
![]()


Рисунок 3.6 – Переходные функции системы
при
![]() и
и
![]() .
.
Определим по графику на рисунке 3.6 установившееся и максимальное значения возмущенной системы: yу=0 и уmax=|-6.5|; и определим в процентах разницу между значением выходной переменной номинальной системы и системы с возмущением
![]()
![]()
![]()
![]()
![]()
![]()


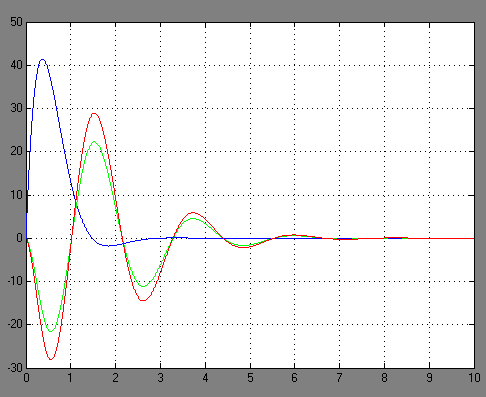
Рисунок 3.7 – Переходные функции системы
при
![]() и
и
![]() .
.
Определим по графику на рисунке 3.7 установившееся и максимальное значения возмущенной системы: yу=0 и уmax=27.5; и определим в процентах разницу между значением выходной переменной номинальной системы и системы с возмущением
![]()
![]()
![]()
![]()
![]()
![]()


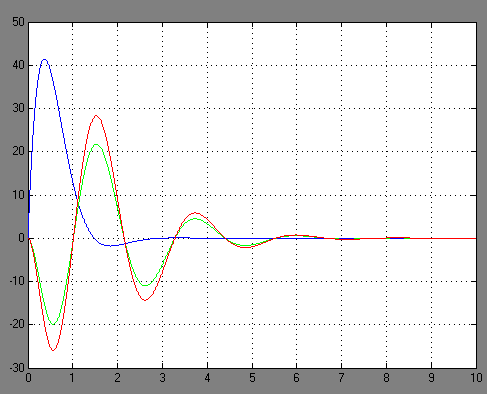
Рисунок 3.8 – Переходные функции системы
при
![]() и
и
![]() .
.
Определим по графику на рисунке 3.8 установившееся и максимальное значения возмущенной системы: yу=0 и уmax=28.8; и определим в процентах разницу между значением выходной переменной номинальной системы и системы с возмущением
![]()
Выделим доминирующие
параметры по степени их влияния на
величину
![]() перерегулирования и установившегося
значения
перерегулирования и установившегося
значения
![]() переходного процесса, и для этого сведем
полученные результаты в таблицу 3.1.
переходного процесса, и для этого сведем
полученные результаты в таблицу 3.1.
Таблица 3.1
|
Вариации Параметры |
q1 |
q2 |
q3 |
q4 |
q6 |
q7 |
|
|
5.7% |
17.7% |
20.8% |
15.4% |
66.7% |
67.4% |
Анализируя представленные в таблице 3.1 данные, параметры по степени влияния на качество процессов следует проранжировать следующим образом:
![]()
Вывод: наибольшее влияние на показатели качества системы оказывают вариации шестого и седьмого параметров.