

3.Определение разности расстояний
В РТС разностно-дальномерного типа определяется разность расстояний от ВС до двух РНТ с известными координатами (рис.10).
В этом случае ∆r = r1- r2.

Рис. 10. Схема разностно-дальномерной РНС и временные диаграммы процессов в ней
Предположим, что в точках А и Б установлены передатчики, одновременно излучающие колебания заданного вида, а на борту ВС в точке С ведется прием этих сигналов и измерение временного интервала между ними Δt. Этот временной интервал определиться как:
Δt = tз1 - tз2; t з1 = r1/с; t з2 = r2 ./с; Δt = (r1 - r2)/с = ∆r/с
Если выполнять полет так чтобы выполнялось условие ∆r = const, то линия положения, по которой будет двигаться ВС, будет гипербола. По этой причине такие РНС иногда еще называют гиперболическим. В разностно-дальномерных системах может использоваться и фазовый метод измерений. В этом случае на борту ВС производится измерение разности фаз сигналов, принятых от станций А и Б:
φ СА = ω∙ r1/с; φ СБ = ω∙ r2/c; Δφ = ω(r1 - r2)/c = ω∙∆r/с;
Δφ = 2π∙∆r/λ.
Погрешность измерения разности расстояний: - σr = λ∙σφ / 2π, где σr- СКП измерения разности расстояний; σφ – СКП измерения разности фаз.
4. Определение угловых координат
Определение направления радиотехническими методами получило название радиопеленгования или радиопеленгации. Угловые измерения сводятся к определению направления на источник радиоизлучения, устанавливаемый или возбуждаемый в точке расположения объекта наблюдения. О направлении на источник можно судить по пространственной ориентации фронта радиоволны. При этом возможны фазовые и амплитудные методы измерений.
Фазовые методы угломерных измерений
- основаны на определении пространственного положения фронта волны путем измерения разности фаз колебаний, возбуждаемых радиоволной в разнесенных приемных антеннах:
а) определение направления на источник
излучения путем поворота базы антенн
(рис.11).
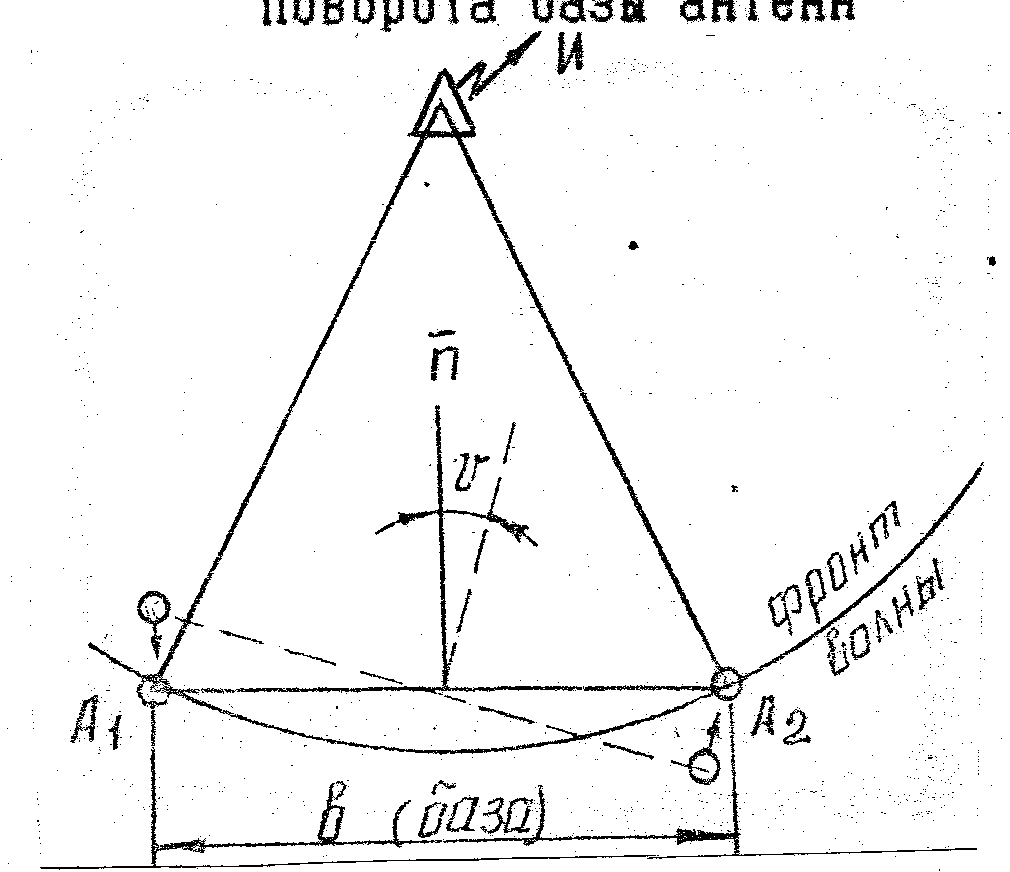
Рис.11. Определение направления путем поворота базы антенн
Измерив разность фаз Δφ=φА1-φА2 поворачивают базу антенн пока Δφ = 0. Это произойдет, когда нормаль n к базе антенн не совпадет с направлением на источник радиоизлучения υ = 0.
б)- определение направления по разности фаз в неподвижных антеннах (рис.12).

Рис.12. Определение направления по разности фаз
В неподвижных антеннах
Δφ = φ А1-φ А2
Δφ = ω·Δt = ω·δr/c =2π ·δr/λ = 2π·(b·sinυ)/λ .
Амплитудные методы угломерных измерений
а) метод “ максимума” - может быть реализован с помощью антенной системы, имеющую диаграмму направленности с отчетливо выраженным минимумом. Поворачивая антенну, добиваются максимума амплитуды сигнала и по повороту конструктивной оси антенны в момент достижения максимума сигнала судят о направлении на источник излучения (рис.12);
ε = max при υ = 0

Рис.12.Диаграмма направленности антенны (а) и зависимость амплитуды выходного сигнала (б) от угловой координаты υ
Недостаток метода - низкая угловая чувствительность и точность. Амплитуда принимаемых сигналов вблизи максимума ДНА изменяется мало и поэтому при малых величинах Δυ сигнал на выходе практически не меняется.
Достоинство - высокая помехозащищенность, т.к. определение угловой координаты производится при максимальном значении полезного сигнала на выходе пеленгатора.
б) метод “минимума” (рис.13);.

ε = min при υ=0
Рис. 13. ДНА (а) и зависимость выходного сигнал (б) от угловой координаты при реализации метода “минимума”
Недостаток метода - низкая помехозащищенность.
Достоинство - высокая угловая чувствительность
в) равносигнальный метод (рис.14);

Рис.14. Диаграммы направленности антенн (а), зависимость амплитуд сигналов на выходе антенн от направления (б) и разность амплитуд (в при измерении направления равносигнальным методом)
Достоинство метода - высокие угловая чувствительность, точность и помехозащищенность; легко определяется сторона уклонения.
Разновидности угломерных систем
А) Если используется слабонаправленное или ненаправленное излучение и направленный прием РНС называется радиопеленгаторной (АРК, АРП).
Б) Если используется направленное излучение и ненаправленный или слабонаправленный прием РНС называется радиомаячной (радиомаяки систем посадки, азимутальные маяки РСБН, маяки VOR и др.).