

Федеральное агентство воздушного транспорта (Росавиация)
 ФГОУ ВПО
“Санкт-Петербургский государственный
университет гражданской авиации”
ФГОУ ВПО
“Санкт-Петербургский государственный
университет гражданской авиации”
Б. А. Сушкевич
РАДИОТЕХНИЧЕСКИЕ СИСТЕМЫ
навигации и посадки


Санкт-Петербург
2008
Лекция 1. Общая характеристика РТС навигации и посадки
1. Назначение и отличительные особенности.
2. Классификация.
3. Эксплуатационно-технические характеристики (ЭТХ).
1. Назначение и отличительные особенности ртс навигации и посадки (ртс н и п)
РТС Н и П – совокупность наземных и бортовых устройств, обеспечивающих решение основной задачи воздушной навигации и основанных на радиотехнических принципах измерения навигационных параметров.
К средствам радионавигации и посадки относятся:
автоматический радиопеленгатор (АРП);
всенаправленный ОВЧ радиомаяк азимутальный (РМА);
всенаправленный ультравысокочастотный (УВЧ) радиомаяк дальномерный (РМД);
радиотехническая система ближней навигации (РСБН);
отдельная приводная радиостанция (ОПРС);
маркерный радиомаяк (МРМ);
оборудование системы посадки (ОСП);
радиомаячная система инструментального захода воздушного судна на посадку (РМС);
локальная контрольно-корректирующая станция (ЛККС).
Автоматический радиопеленгатор предназначен для выдачи информации о пеленге на воздушное судно относительно места установки антенны радиопеленгатора по сигналам бортовых радиостанций в центры (пункты) ОВД..
Всенаправленный азимутальный радиомаяк диапазона ОВЧ предназначен для измерения азимута воздушного судна относительно места установки радиомаяка при полетах воздушного судна по трассам и в районе аэродрома.
Всенаправленный дальномерный радиомаяк диапазона УВЧ предназначен для измерения дальности воздушного судна относительно места установки радиомаяка при полетах воздушных судов по трассам и в районе аэродрома.
Радиотехническая система ближней навигации предназначена для определения азимута и дальности воздушного судна на борту и на земле относительно места установки наземного радиомаяка.
Отдельная приводная радиостанция предназначена для обозначений контрольного пункта на трассе (маршруте полета), привода воздушного судна, оснащенных соответствующим оборудованием, в район аэродрома, выполнения предпосадочного маневра и выдерживания направления полета воздушного судна вдоль оси взлетно-посадочной полосы. В состав ОПРС может входить МРМ для информирования экипажа воздушного судна о пролете фиксированной точки.
Оборудование системы посадки состоит из двух приводных радиостанций с МРМ (дальняя и ближняя) и предназначено для привода воздушного судна, в район аэродрома, выполнения предпосадочного маневра и захода на посадку. Дальняя приводная радиостанция (ДПРС) и МРМ предназначены для привода воздушного судна район аэродрома, выполнения предпосадочного маневра, выдерживания курса посадки и обеспечения работы в микрофонном режиме. Ближняя приводная радиостанция (БПРС) и МРМ предназначены для выдерживания воздушного судна курса посадки.
Радиомаячная система инструментального захода воздушного судна на посадку (РМС) состоит из комплекса наземного и бортового радиотехнического оборудования и предназначена для обеспечения получения на борту воздушного судна и выдачи экипажу и в систему автоматического управления информации о значении и знаке отклонения от номинальной траектории снижения, а также для определения моментов пролета характерных точек на траектории захода на посадку. В состав РМС входят курсовой радиомаяк (КРМ), глиссадный радиомаяк (ГРМ) и маркерные радиомаяки (МРМ).
Локальная контрольно-корректирующая станция представляет собой систему функционального дополнения наземного базирования к глобальной навигационной спутниковой системе и предназначена для формирования и передачи воздушным судам дифференциальных поправок к псевдодальностям навигационных спутников и информации о целостности сигналов, излучаемых навигационными спутниками. ЛККС совместно с навигационными спутниками глобальной навигационной спутниковой системы обеспечивает навигацию воздушного судна в районе аэродрома и поддерживает выполнение процедур зональной навигации.
Область применения, достоинства и недостатки РТС Н и П.
Внедрение РТС Н и П в практику СВЖ значительно уменьшает зависимость полетов от метеоусловий и существенно повышает безопасность полетов.
Преимущества РТСН и П:
- всепогодность и возможность применения в любое время суток и года;
- высокая точность измерения навигационных параметров;
- многофункциональность;
- возможность использования на всех этапах полета, включая предпосадочное маневрирование и заход на посадку в сложных метеоусловиях;
Ограничения и недостатки
- подверженность влиянию помех, создаваемых радиосредствами одного и того же типа или радиосредствами различного назначения;
- снижение качества функционирования из-за мешающего воздействия сигналов, отраженных неровностями рельефа и местными предметами вблизи от антенных систем;
- ограниченные размеры зон действия в вертикальной плоскости;
Классификация РТС Н и П.
РТС Н и П можно классифицировать по следующим признакам:
- по назначению:
1) РТС навигации;
2) посадки;
3) используемые в комплексах УВД;
4) предупреждения столкновений;
5) опознавания,
- по виду информативного параметра радиосигнала:
е = Еm∙ sin (ωt + φ) - радиосигнал
Параметры радиосигнала:
Еm- амплитуда; ω – частота; t – время распространения; φ – фаза.
Если измеряемый навигационный параметр (НП – угол, скорость, расстояние и т.д.) функционально связан с одним из параметров радиосигнала, то различают следующие виды РТС:
1) амплитудные - НП = f (Еm);
2) фазовые - НП = f(φ);
3) частотные – НП = f(ω);
4) временные – НП = f(t),
- по виду определяемого навигационного параметра (НП):
1) угломерные;
2) дальномерные;
3) разностно-дальномерные;
4) измерители линейных и угловых скоростей;
5) комбинированные (угломерно-дальномерные),
- по дальности действия:
1) РТС ближней навигации (РСБН с дальностью действия <350…400 км);
2) РТС дальней навигации (РСДН с дальностью действия < 2500…3000км);
3) глобальные,
-по степени автономности:
1) автономные (радионавигационные устройства – РНУ);
2) неавтономные (радионавигационные системы – РНС).
Эксплуатационно-технические характеристики РТС Н и П
Точность - это свойство РТС осуществлять измерение навигационного параметра с погрешностью, не превышающей заданную величину (допуск). Погрешность измерения является количественной мерой точности и представляет отклонение измеренного значения навигационного параметра от его истинного значения.
Погрешности измерения можно классифицировать по следующим признакам:
- по характеру происхождения:
а) методические;
б) аппаратурные или инструментальные;
в) обусловленные помехами;
г) субъективные или ошибки оператора;
- по характеру проявления:
а) систематические;
б) случайные.
Значение систематических погрешностей постоянно или меняется по закону, имеющему детерминированный характер.
Случайные погрешности отличаются тем, что их значение и знак хаотически изменяются от измерения к измерению. Случайные погрешности характеризуются законом распределения, дисперсией, значением средней квадратической погрешности (СКП) и другими параметрами. Чаще всего случайные погрешности подчинены нормальному закону распределения.
Зона действия – это область пространства, в пределах которой обеспечивается получение требуемой навигационной информации.
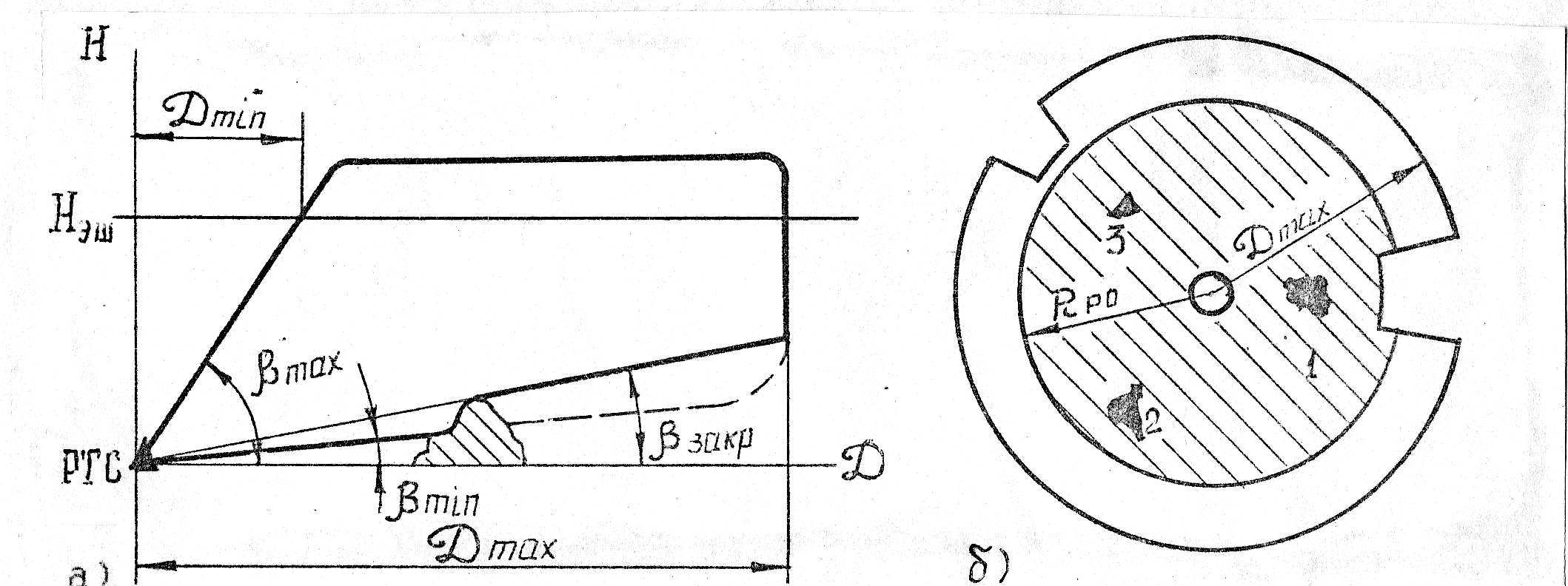
Рис.1. Зона действия и рабочая область РТС
а) вертикальная плоскость; б) горизонтальная плоскость
Зону действия принято характеризовать максимальной Dmax и минимальной Dmin дальностью действия (рис.1). Максимальная дальность действия зависит от используемого диапазона радиоволн и условий их распространения (характера земной поверхности, рельефа местности, состояния атмосферы и ионосферы, времени суток, высоты полета и др.), а также от технических характеристик передающих, приемных и антенных устройств РТС.
Максимальная дальность действия РТС метрового и сантиметрового диапазонов вследствие прямолинейности распространения радиоволн чаще всего ограничивается дальностью прямой радиовидимости, для расчета которой может быть использовано следующее выражение:
Rпр [км]
= (3,5...4,1)![]() .
.
Минимальная дальность действия определяется высотой полета ВС и формой диаграммы направленности в вертикальной плоскости (рис.1) и может быть определена как –
Dmin = Hпол/ tg βmax.
Рабочая область - это объем пространства, в пределах которого погрешность определения места ВС не превышает заданную с определенной вероятностью:
Rpo = f (Dmax, Dmin, σнп ).
Надежность - это способность РТС выполнять заданные функции и сохранять эксплуатационные показатели в течение заданного интервала времени.
РТС относятся к классу восстанавливаемых изделий, т.е. в них могут происходить отказы, они устраняются и эксплуатация продолжается далее. Надежность таких изделий принято характеризовать некоторыми количественными показателями:
- среднее время наработки на один отказ
Т0 =
 ,
,
где:
![]() - интервал времени межу соседними
отказами;
- интервал времени межу соседними
отказами;
![]() - количество отказов.
- количество отказов.
- интенсивность
или частота отказов
![]() ;
;
- вероятность
безотказной работы
![]() ≈ 1- t / T0;
≈ 1- t / T0;
- коэффициент
готовности
 ,
где
,
где
![]() -
среднее время восстановления;
-
среднее время восстановления;
- вероятность
нормального функционирования
![]()
В стандартах ИКАО оговариваются требования к надежности РТС навигации и посадки:
Вероятность отказа навигационных средств должна быть Ротк нс ≤ 10-4 за три часа полета; или одно летное происшествие на 107…108 летных часов по вине навигационных систем.
РТС посадки должны обеспечивать безопасную автоматическую посадку при вероятности летного происшествия не более 10-7 .
Пропускная способность - это максимальное число ВС, одновременно обслуживаемых данным типом РТС.
Быстродействие - определяется временем, которое затрачивается на получение навигационной информации. Оно должно быть не более 1мин для дозвуковых ВС и не более 3…7 с для сверхзвуковых.
Помехоустойчивость - это способность РТС выполнять свои функции в условиях естественных и искусственных помех.
Эффективность - показатель полноты решения поставленных перед РТС задач с учетом целевого назначения системы и условий ее работы.
Масса и габариты.
К техническим характеристикам относятся:
- диапазон рабочих частот;
- мощность излучаемых сигналов;
- чувствительность приемного устройства;
- характеристика антенн (форма диаграммы направленности, коэффициент усиления, КНД и др.);
- метод обзора пространства;
- тип оконечного устройства отображения информации;
- потребляемая мощность и др.