

4.2 Система команд бис к1810вм86
Система команд микропроцессора включает 133 базовые команды и позволяет обрабатывать как восьми-, так и шестнадцатиразрядные данные. Команды могут быть безоперандными, а также содержать один или два операнда. Длина команд может составлять от 1 до 6 байт. Код операции находится в первом байте команды, а остальные байты содержат информацию об адресах операндов. Чтобы различать операции над байтами или словами, в первом байте команды используется специальный разряд W. При W=l операции выполняются с шестнадцатиразрядными данными.
В микропроцессоре К1810ВМ86 используются почти все известные в настоящее время способы адресации: прямая, регистровая, регистровая косвенная, непосредственная, стековая, базовая, индексная, базово-индексная, относительная. Разнообразие способов адресации во многом связано с наличием большого набора регистров, применяемых для хранения данных и адресов. Наряду с основным использованием сегментных регистров для адресации операндов по правилу умолчания при выполнении многих команд возможны дополнительные варианты адресации.
Для операндов, расположенных в памяти, применяются следующие виды ад-
ресации: прямая адресация с 16-разрядным адресом; косвенная по содержимому некоторого базового регистра (базовая) с 8-разрядным или 16-разрядным смещением; косвенная по сумме содержимого базового регистра и регистра индекса (ба-зово-индексная) с 8-разрядным и 16-разрядным смещением.
При использовании индексной адресации операнд по умолчанию располагается в текущем сегменте данных, а при базово-индексной адресации операнд по умолчанию находится в сегменте, задаваемом базовым регистром.
Вид адресации в команде чаще всего задается байтом, следующим за кодом операции.
5 Описание блок-схемы работы индикатора шин
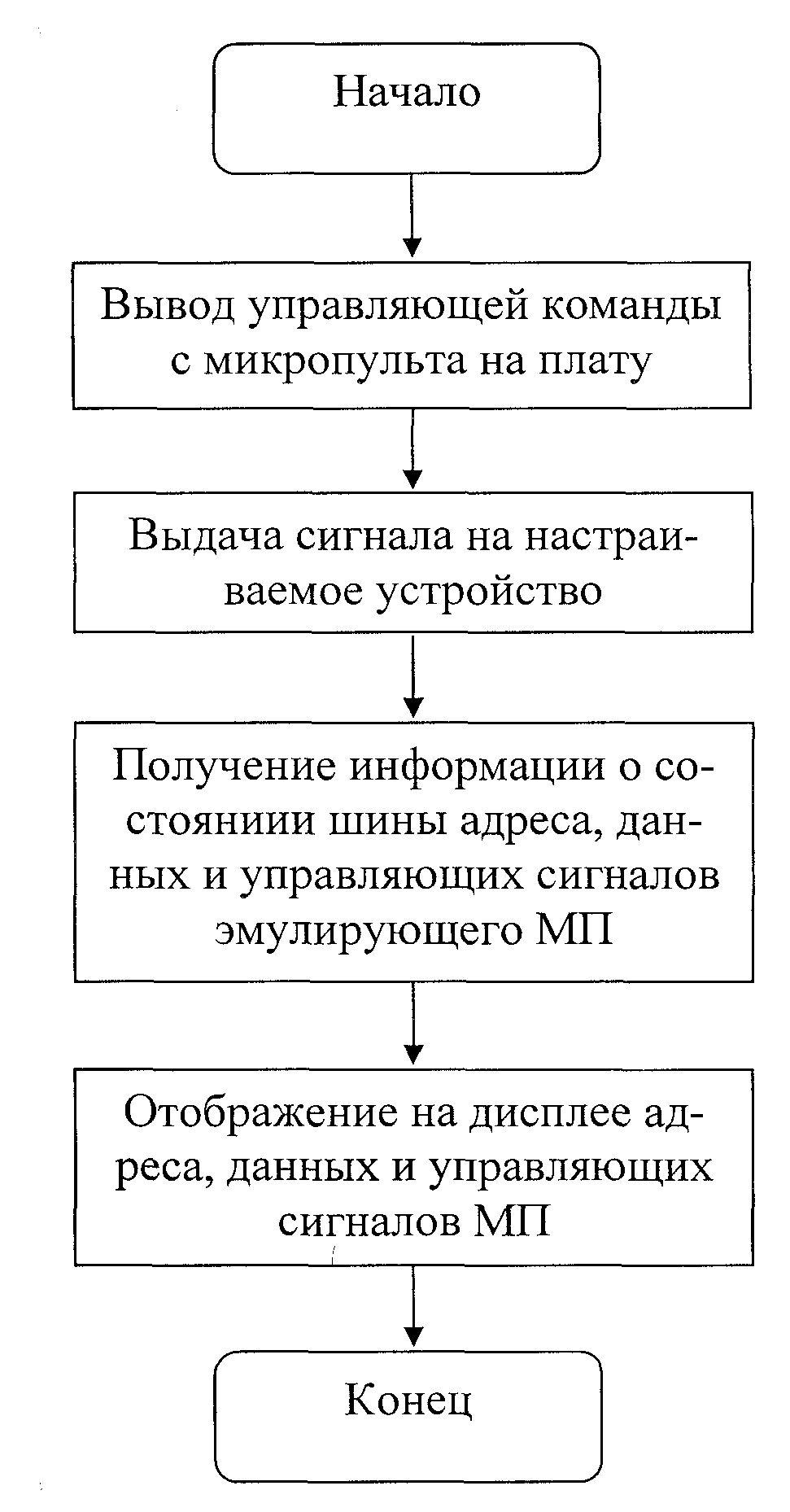
Описывая алгоритм работы индикатора шин видно, что его удобно применять при настройке и ремонте устройств на базе МП К1810ВМ86, прогоняя «зашитую» в РПЗУ программу в автоматическом, пошаговом или полуавтоматическом режиме с остановом на контрольной точке. Управляющая команда поступает из микропульта на плату, затем подается на настраиваемое устройство. Затем идет обратная передача информации от настраиваемого устройства и отображается на дисплее микропульта.
ЗАКЛЮЧЕНИЕ
В данном курсовом проекте был рассмотрен индикатор шин, который применяется при настройке и ремонте устройств. Представлена его структурная схема, рассмотрены основные элементы, составляющие схему.
На основе анализа литературы проведено сравнение применяемого микропроцессора К1810ВМ86 с аналогами по основным характеристикам, что позволило сделать вывод, данный микропроцессор по всем параметрам подходит для данной системы.
Рассмотрена структурная схема микропроцессора, основные узлы составляющие ее.
Описана блок-схема работы индикатора шин.
ПРИЛОЖЕНИЕ

Приложение 1 - Принципиальная схема процессора