

курсовой проект / Аэроионизатор / Лит-ра для КР / ТЕХНИЧЕСКОЕ ЗАДАНИЕ
.doc
1 ТЕХНИЧЕСКОЕ ЗАДАНИЕ
1.1 Назначение
Аэроионизатор предназначен "оздоровлять" воздух наших жилищ, насыщая их живительными отрицательными аэроионами. Концентрация легких аэроионов существенно уменьшается при удалении от электрода - примерно в 10 раз на каждом метре удаления. Этот спад обусловлен рекомбинацией (гибелью) ионов, а также их захватом различными аэрозольными частицами, загрязняющими воздух. Из-за рекомбинации среднее время существования (продолжительность "жизни") легких аэроионов весьма ограничено и практически не превышает десятка секунд. Поэтому принципиально невозможно создать в помещении равномерное распределение аэроионов, и уж тем более пытаться насытить ими воздух в нескольких помещениях, если ионизатор установлен только в одном из них. Бесполезно также пытаться запастись аэроионами впрок. После выключения прибора их концентрация быстро упадет до фонового уровня. Но польза от поработавшего прибора все равно будет проявлять себя еще долгое время в виде чистого воздуха. При необходимости насыщения аэроионами нескольких помещений нужно каждое из них оснащать ионизатором или пользоваться переносным прибором. С учетом сказанного и был разработан компактный аэроионизатор.
1.2 Технические характеристики устройства
- питающее напряжение с частотой 50 Гц
- ток полного отклонения стрелки 50 мкА
- предел измеряемого напряжения составлял 100 кВ.
- питание от сети 220 В
- диодный умножитель на 40 кВ
- выбор потенциала на электроде от 15 до 30 кВ
2 РАЗРАБОТКА СХЕМЫ ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ УСТРОЙСТВА
Под управлением микроконтроллера аэроионизатор сможет работать не только в привычном непрерывном режиме, хотя и в нем предусмотрена возможность регулировать подаваемое на нее напряжение. Он будет включаться и выключаться с заданным периодом и автоматически прекращать работу по истечении установленного времени. Параметры всех режимов можно изменять с кнопочного пульта, наблюдая их значения на светодиодном цифровом индикаторе.
Основная часть схемы источника (без подключаемой к вилке ХР1 платы ввода/вывода) приведена на рис.1.
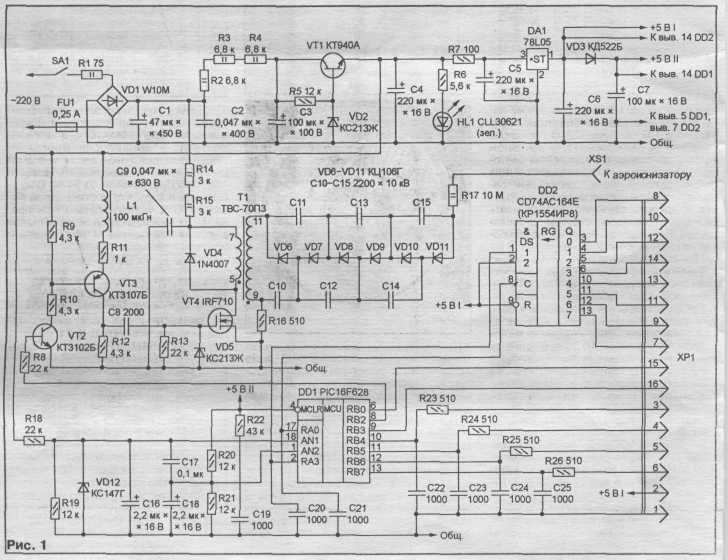
Рисунок 1- Схема электрическая принципиальная
Здесь можно выделить три основных функциональных узла.
Узел питания — бестрансформаторный. Это вполне оправдано при общем потребляемом от сети токе не более 15 мА. Диодный мост VD1 выпрямляет переменное сетевое напряжение. Резистор R1 ограничивает амплитуду импульсов зарядного тока конденсатора С1. Выпрямленное напряжение через гасящие резисторы R14 и R15 питает оконечный каскад высоковольтного инвертора на полевом транзисторе VT4, а через резисторы R2—R4 {на них падает приблизительно 70 В) — стабилизатор напряжения +12 В на транзисторе VT1 для предварительных каскадов инвертора. Из напряжения +12 В с помощью интегрального стабилизатора DA1 получают +5 В для питания микросхем устройства.
Узел управления построен на базе микроконтроллера PIC16F628, который должен быть предварительно запрограммирован в соответствии с таблицей. Данные об установленном пользователем режиме работы источника микроконтроллер хранит во внутренней энергонезависимой памяти. Поэтому нет необходимости, включая ионизатор, каждый раз настраивать источник его питания заново — работа будет автоматически возобновлена в режиме, действовавшем в момент выключения.
Чтобы заблаговременно распознать этот момент, использованы два компаратора, встроенных в микроконтроллер. На их входы (выводы 1 и 18 DD1) поступает напряжение из диагонали резисторного моста R18—R21, причем во время работы прибора напряжение на выводе 18 DD1 выше, чем на его выводе 1. После отключения от сети напряжение на выводе 18 DD1 быстро спадает, а в цепи +5 В II и на выводе 1 DD1 некоторое время остается почти неизменным благодаря цепи VD3C7. Обнаружив, что разность потенциалов выводов 18 и 1 изменила знак, микроконтроллер успевает записать в энергонезависимую память данные о режиме работы прежде, чем напряжение его питания упадет до значения, недостаточного для продолжения работы.
На выводы 10—13 микроконтроллера поступают сигналы от четырех установленных на плате ввода/вывода кнопок, с помощью которых управляют источником. Формируемые микроконтроллером в последовательной форме сигналы управления находящимися на той же плате двумя цифровыми светодиодными индикаторами сдвиговый регистр DD2 преобразует в параллельную форму. Индикация динамическая: в зависимости от уровней напряжения на выводах 6 и 9 DD1 в каждый момент времени работает лишь один из индикаторов. Высоковольтный инвертор построен на транзисторах VT2-VT4 и импульсном трансформаторе Т1 – строчном от малогабаритного черно-белого телевизора. Импульсы прямоугольной формы частотой 150…350 Гц, генерируемые микроконтроллером DD1 на выводе 8, усиливают транзисторы VT2 и VT3 до амплитуды 10…12 В. После укорочения дифференцирующей цепью C8R13 эти импульсы открывают мощный КМОП-транзистор VT4, в цепь стока которого включена обмотка 5-7 трансформатора Т1. Диод VD4 - демпферный.
Импульсы с повышающей обмотки (9-11) трансформатора поступают на выпрямитель с умножением напряжения на диодных столбах VD6 – VD11. Схема и конструкция такого выпрямителя общеизвестна. В зависимости от частоты повторения импульсов напряжение, подаваемое на ионизатор, изменяется в интервале 15…35 кВ, при необходимости его можно увеличить, добавив еще несколько ступеней умножения напряжения.
3 ОБОСНОВАНИЕ ВЫБОРА МИКРОПРОЦЕССОРА
Аналогом микроконтроллера PIC16F628 является микроконтроллер PIC16F84A . Проведем сравнительный анализ этих микроконтроллеров.
Таблица – 1 Сравнительный анализ аналогов
|
|
PIC16F628 |
PIC16F84A |
|
Память программ (слов) FLASH |
2048 x 14 |
1024 |
|
Память данных ОЗУ (байт) |
224 x 8 |
68 |
|
Память данных ЭСППЗУ (байт) |
128 x 8 |
64 |
|
технология КМОП |
Экономичная, высокоскоростная |
Экономичная, высокоскоростная |
|
архитектура
|
Полностью статическая |
Полностью статическая |
|
Низкое потребление энергии: |
- < 2 мА при 5,0 В, 4,0 МГц - 15 мкА (типичное значение) при 3 В, 32 кГц - < 1,0 мкА (типичное значение) в режиме STANDBY при 3В
|
- < 2 мА при 5,0 В, 4,0 МГц - 15 мкА (типичное значение) при 2 В, 32 кГц - < 0,5 мкА (типичное значение) в режиме STANDBY при 2В
|
Особенности ядра PIC16F628:
- Сброс при включении питания (POR);
- Таймер включения питания (PWRT) и таймер запуска генератора (OST)
- Сброс по падению напряжения питания (BOD)
- Сторожевой таймер (WDT) с собственным встроенным RC-генератором для повышения надежности работы;
- Программируемая защита кода;
- Режим экономии энергии (SLEEP)
- Программирование на плате через последовательный порт (с использованием двух выводов)
- Четыре программируемых пользователем идентификатора;
- Низкое напряжение программирования;
- Пробуждение из режима SLEEP по изменению состояния выводов;
- Внутренние резисторы к шине питания на линиях ввода/вывода;
- Внутренний резистор на линии MCLR.
Выбираемые режимы тактового генератора: - FLASH конфигурационные биты для установки режимов генератора; - Двухчастотный INTRC c низким энергопотреблением; - EXTRC: внешний недорогой RC-генератор; - XT: стандартный генератор на кварцевом резонаторе; - LP: экономичный, низкочастотный генератор на кварцевом резонаторе. - HS: высокочастотный генератор на кварцевом резонаторе. - EC: вход для подключения внешнего генератора.
Особенности микроконтроллера PIC16F84A:
- программирование на плате через последовательный порт (ICSPT) (с использованием двух выводов)
- сброс при включении питания (POR);
- таймер включения питания (PWRT) и таймер запуска генератора (OST);
- сброс по падению напряжения питания;
- сторожевой таймер (WDT) с собственным встроенным RC-генератором для повышения надежности работы;
- программируемая защита кода;
- режим экономии энергии (SLEEP).
Указанные особенности архитектуры микроконтроллеров PIC оправданы чрезвычайно низкой ценой, поэтому эти изделия весьма популярны. В настоящее время их используют даже вместо логических ИС средней степени интеграции. Серию PIC16 представляют недорогие высокопроизводительные 8-разрядные МК с RISC архитектурой и системой компактных 14-разрядных команд. Весь набор состоит всего из 35 простых и понятных команд, которые легко изучаются и запоминаются, что упрощает процесс освоения МК. Все команды выполняются за один машинный цикл, кроме команд ветвления, которые выполняются за два машинных цикла. Для автоматизации аэронизатора выберем микроконтроллер PIC16F628.
4 ОПИСАНИЕ МИКРОПРОЦЕССОРА
4.1 Цоколевка корпуса
Большинство портов МК имеют альтернативные функции. Для иллюстрации функций выводов микроконтроллеров рассмотрим цоколевку PIC16F628.
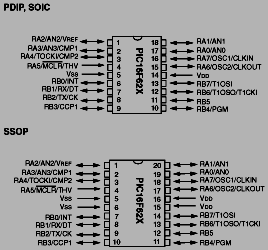
Рисунок 1 – Цоколевка корпуса
Альтернативные функции выводов OSC1, OSC2 и вывода -MCLR задаются в слове конфигурации, т.е. один раз на этапе программирования МК. Выводы, используемые при программировании или тестировании МК программатором, на соответствующие функции переводятся автоматически, при входе в режим программирования. Остальные выводы МК могут переключаться на свои альтернативные функции программно. Для правильной настройки периферийного модуля и, в частности, вывода МК на выполнение альтернативной функции, нужно в документации МК найти описание интересующего периферийного модуля, и выяснить какие регистры и как должны быть инициализированы, и реализовать эту инициализацию в программе.
По включению питания МК.
-
Все порты настроены как входы. Это исключает непредусмотренные явления. Пример. Вывод МК по схеме используется как вход кнопки и закорочен на питание кнопкой с нормально замкнутыми контактами. Если при инициализации МК этот вывод окажется в режиме выхода с низким уровнем, то, во-первых, выходной буфер может быть поврежден аномальным током, во-вторых, может произойти сброс МК из-за потери питания. Электролит в цепи блокировки питания не поможет!
-
Если МК имеет аналоговые функции на каких-то входах, то эти входы настроены как аналоговые. Это сделано для того, чтобы избежать побочных эффектов. Когда аналоговый сигнал на цифровом входе имеет околопороговый уровень и не может перевести входной буфер в одно из логических состояний, оба транзистора буфера оказываются открытыми, пропуская значительный ток от шины питания на общую шину. При маломощном источнике питания возможна потеря питания и сброс МК.
После подачи питания на МК начинает выполняться его рабочая программа, которая первым делом осуществляет настройку портов, периферийных модулей, прерываний и инициализирует переменные.
Таблица 2 - Описание выводов микропроцессора
|
Функция |
I – вход, O - выход |
Тип входа |
Описание |
|
RA2/AN2/VREF- |
P/O |
TTL |
RA2 / аналоговый вход_2 АЦП / вход “-” образцового напряжения для АЦП |
|
RA3 /AN3/CMP1 |
P/O |
TTL |
RA3 / аналоговый вход_3 АЦП |
|
RA4/TOCK1/CMP2 |
I/O |
ST |
RA4 / вход внешнего сигнала для TMR0 |
|
RA5/MCLR/THV |
I |
ST |
RA5 / внешний сброс / тестируется МК программатором |
|
Vss |
P |
- |
Общий |
|
RB0/INT |
I/O |
TTL/ST |
RB0 / внешнее прерывание |
|
RB1/RX/DT |
I/O |
ST |
RB1 / вход USART в асинхронном режиме / данные USART в синхронном режиме |
|
RB2/TX/CK |
I/O |
ST |
RB2 / выход USART в асинхронном режиме / тактовый сигнал USART в синхронном режиме |
|
RB3/CCP1 |
I/O |
ST |
RB3 / вход ЗАХВАТ/выход СРАВНЕНИЕ/выход ШИМ модуля CCP1 |
|
RA1/AN1 |
I/O |
TTL |
RA1/ аналоговый вход_1 АЦП |
|
RA0/AN0 |
I/O |
TTL |
RA0 / аналоговый вход_0 АЦП |
|
1 |
2 |
3 |
4 |
продолжение таблицы 2
|
1 |
2 |
3 |
4 |
|
RA6/OSC2/CLKOUT |
O |
- |
Выход генератора для кристаллического или кварцевого резонатора / выход внешнего тактового сигнала. В режиме RC генератора выход ¼ Fosc |
|
Vdd |
P |
- |
Питание |
|
RB7/T1OSI |
I/0 |
ST |
Вход осциллятора TMR1 |
|
RB6/T1OSC/T1CKI |
I |
ST/ SMOS |
Вход генератора для кристаллического, кварцевого или RC резонатора / вход внешнего сигнала TMR1 |
|
RB5 |
I/O |
TTL |
RB5 |
|
RB4/PGM |
I/O |
TTL |
RB3 / вход разрешения низковольтного программирования |
4.2 Структурная схема микропроцессора
При работе микроконтроллера, его программа использует различные оперативные данные, полученные в результате вычислений, преобразований, считываний с внешних устройств и портов. Эти оперативные данные называют переменными величинами, или просто, переменными. Для хранения переменных служит память данных (ПД, DATA MEMORY, DM). ПД представляет собой массив регистров разрядностью в один байт. Объем ПД всегда гораздо меньше, чем ПП, и обычно составляет от 16 до 256 байт. При выключении питания МК, данные в ПД не сохраняются. Обычно это и не требуется. Но бывает необходимо время от времени, по ходу работы МК, скорректировать или запомнить какие-то параметры. Например, одни телевизоры при очередном включении устанавливают усредненные значения оперативных регулировок, а другие восстанавливают их такими, какими они были при последнем выключении телевизора. В первом случае, измененные пользователем настройки запоминаются в ПД и, при выключении питания исчезают, а при включении, программа берет начальные параметры из ПП и инициирует ими соответствующие переменные в ПД. Программа МК не может изменить содержимое ПП, поэтому предписанные программистом начальные параметры не могут быть изменены. Все изменения в ПД не сохраняются при выключении питания. Т.о. становится очевидной необходимость памяти обладающей свойствами, как ПЗУ, так и ОЗУ. С появлением FLASH микроконтроллеров такая память была создана и введена в состав МК. Она реализована в виде массива ячеек (обычно 64…256) разрядностью в один байт и называется EEPROM Data Memory или FLASH ПД. Программа микроконтроллера в ходе своего исполнения может считывать и записывать байты во FLASH ПД. Данные в ней могут быть переписаны миллионы раз и сохраняются при выключении питания. Чтобы считать байт из FLASH ПД необходимо выполнить соответствующую процедуру состоящую из нескольких команд, а чтобы записать байт во FLASH ПД необходимо выполнить соответствующую процедуру и подождать окончания записи несколько миллисекунд. Некоторые МК имеют возможность записи и считывания данных прямо во FLASH ПП, используя такой же механизм, как и при доступе к FLASH ПД. В принципе не имеет значения, где хранить изменяемый параметр, только нужно иметь в виду, что
-
FLASH ПД допускает до 100 000 циклов чтения/записи
-
FLASH ПП допускает до нескольких тысяч циклов чтения/записи
-
Запись во FLASH ПП в принципе изменяет саму программу
МК разных типов имеют различное число линий ввода/вывода, но, в любом случае, все они логически разбиты на группы по 8. Группы называются как PORTA, PORTB, PORTC и т.д. Число имеющихся у МК линий ввода/вывода не обязательно кратно 8, поэтому группа может быть не полной, но всегда, как логическая единица, порт представляет собой байт. Как правило, каждый разряд порта, независимо от других разрядов, может быть оперативно настроен как на ввод бита, так и на вывод. Т.е. программа может оперативно переключать направление разряда порта. Как это делается? Просто каждому порту соответствует дополнительный регистр, разряды которого определяют направление соответствующего разряда порта. Эти регистры называются TRISA, TRISB, и т.д. Единица в разряде регистра TRIS переключает соответствующий разряд порта на вход, а ноль - на выход. Подобно регистрам TRIS, существуют и другие служебные регистры, с помощью которых программа осуществляет управление различными функциями и функциями периферийных модулей. Как ядро МК, так и его периферийные модули, имеют свои информационные регистры, как, например регистр STATUS, в котором находятся флаги (биты) описывающие некоторые признаки результата выполненной операции, или регистры АЦП, из которых можно считать результат преобразования. Все служебные регистры, такие как управляющие и информационные регистры, порты, и даже счетчик программ относятся к регистрам специальных функций (Special Function Registers, коротко SFR). Регистры специальных функций управляют свойствами различных физических и логических модулей МК или являются носителями результата функции, выполняемой модулем. Например, таймер, порт или АЦП перед использованием должен быть настроен на требуемый режим. Для этого в управляющий регистр модуля записывается управляющее слово. После окончания функции модуля результат считывается из другого специального регистра модуля. Все эти регистры являются регистрами специальных функций. Каждый SFR имеет имя, причем имена стандартны для всего семейства МК PIC. И вот еще одно замечательное свойство МК PIC: все регистры SFR находятся в адресном пространстве памяти данных. К любому регистру SFR можно обращаться так же, как и к любой ячейки ПД. Это значит, что для функционирования МК нет надобности в специальных управляющих командах, достаточно обычных арифметических и логических команд и команд пересылки, что значительно сокращает весь набор необходимых команд, облегчает освоение МК и упрощает написание и чтение программ. SFR занимают первые 0x20 адресов на каждой странице ПД (о страничной организации ПД чуть позже). После SFR в ПД расположены регистры общего назначения (РОНы, General Purpose Registers, GPR).
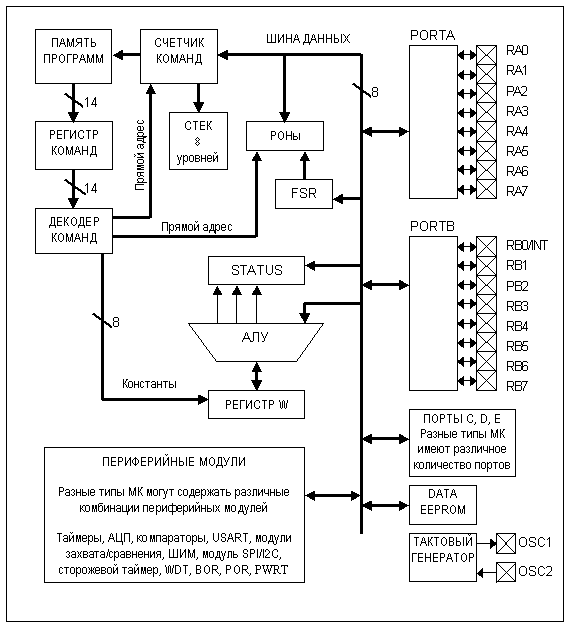
Рисунок 2 - Структурная схема микропроцессора
Раздельные память и шины для команд и для данных. Разрядность ПП и шины команд - 14, ПД, регистров АЛУ и шины данных - 8. В арсенале всего 35 простых и компактных команд. Все команды выполняются за 1 машинный цикл, кроме команд ветвления, которые выполняются за 2 машинных цикла.
Все регистры МК делятся на две группы: специальные регистры и регистры общего назначения. Обе группы составляют единое пространство - память данных, поэтому для управления функциями и настройками МК не требуются специальные команды.
Ортогональная система команд позволяет выполнить любую операцию с любым регистром, используя любой метод адресации.
В состав разных типов МК входят различные стандартные периферийные модули, выполняющие типичные для цифровых систем функции. Они освобождают ресурсы МК, упрощают программу и удешевляют изделие.
Все выводы МК, кроме выводов питания и сброса, используются как порты общего назначения. Периферийные модули не занимают монопольно выводы МК. Все коммуникации осуществляются через альтернативные функции портов. Т.е. программа может подключать модуль к внешнему выводу МК только когда это необходимо. Если модуль не используется, то он и не использует никакие выводы МК.
Несколько типов тактовых генераторов. Тактовая частота 0…20МГц.
Диапазон напряжения питания не является архитектурной особенностью, и все-таки: 2…5,5В - для низковольтных вариантов МК (LC, LF) и 3,5(4,5)…5,5В - для остальных.
Неотъемлемая составная часть микроконтроллера - это АЛУ (Арифметико-логическое устройство). АЛУ выполняет арифметические и логические операции с участием одного или двух операндов (байтов), а также битовые операции. В последнем случае операндом является байт, но операция выполняется только над одним из его битов. В состав ядра МК входит и занимает центральное место особый 8-разрядный регистр, он называется рабочим и обозначается как W (от слова Work - работа). Регистр W не имеет адреса и не отображается на адресное пространство памяти данных, поэтому его нельзя адресовать или обратиться к нему прямо или косвенно. Он участвует в операциях непосредственно. С его участием выполняются все двухоперандные операции, операции с константой и операции пересылки, в нем можно сохранить результат операции. Иногда интересует не сам результат операции, а лишь некий его признак, например, знак результата, или равен ли результат операции нулю или нет. Эти признаки называют флагами состояния АЛУ. Таких флагов три и доступны они в виде битов регистра STATUS: бит Z: 1 - результат арифметической или логической операции равен нулю, 0 - результат операции не равен нулю; бит C: 1 - результат арифметической операции отрицательный, 0 - не отрицательный; бит DC: 1 - в результате арифметической операции был перенос единицы из младшей тетрады в старшую, 0 - переноса не было
Не каждая операция влияет на тот или иной флаг. Например, операция пересылки байта из регистра W в регистр памяти данных не влияет на флаги. А операция пересылки байта из регистра памяти данных в регистр W влияет на флаг Z: если пересылаемый байт равен нулю, флаг Z будет установлен, иначе сброшен. Прежде чем проверять флаг, как результат операции, загляните в таблицу операций и убедитесь, что операция воздействует на интересующий флаг.
Узел управления построен на базе микроконтроллера PIC16F628, который должен предварительно запрограммирован в соответствии с таблицей. Данные об установленном пользователем режиме работы источника микроконтроллер хранит во внутренней энергонезависимой памяти. Поэтому нет необходимости, включая ионизатор, каждый раз настраивать источник его питания заново – работа будет автоматически возобновлена в режиме, действовавшем в момент выключения.
Чтобы заблаговременно распознать этот момент, использованы два компаратора, встроенных в микроконтроллер. На их входы (выводы 1 и 18 DD1) поступает напряжение из диагонали резисторного моста R18-R21, причем во время работы прибора напряжение на выводе 18 DD1 выше, чем на его выходе 1. После отключения от сети напряжение на выводе 18 DD1 быстро спадает, а в цепи +5В II и на выводе 1 DD1некоторое время остается почти неизменным благодаря цепи VD3C7. Обнаружив, что разность потенциалов выводов 18 и 1 изменила знак, микроконтроллер успевает записать данные о режиме работы прежде, чем напряжение его питания упадет до значения, недостаточного для продолжения работы.