

Министерство образования и науки РС(Я) ФГАОУ ВПО
«СЕВЕРО-ВОСТОЧНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ им М.К. Аммосова» Технологический институт Кафедра «многоканальных телекоммуникационных сетей»
Курсовая работа На тему: «Принципы формирования канальных сигналов в разностных ЦСП» Специальность 210404 «Многоканальные телекоммуникационные системы»
Выполнил: Студент 4 курса
гр. МТС-08 Тартыев В.А. Проверила: Данилова Л.Г.
г. Якутск 2011г.
Содержание:
-
Введение.
-
Основная часть:
-
Дифференциальная импульсно-кодовая модуляция.
-
Дельта модуляция.
-
Адаптивная дифференциальная импульсно-кодовая модуляция.
-
Адаптивная дельта модуляция.
-
Заключение.
4. Список литературы.
Введение.
Данная работа посвящена рассмотрению принципов формирования канальных сигналов в разностных ЦСП. В ЦСП с ИКМ квантованию и кодированию подвергаются дискретные по времени отсчеты непрерывного сигнала, взятые из условий теоремы отсчетов (Котельникова). Однако такой метод передачи не является единственно возможным методом цифровой передачи непрерывных аналоговых сигналов. Существуют и другие методы формирования цифровых сигналов называемые разностными.
Целью данной работы является изучение разных видов модуляции таких как: дифференциальная импульсно-кодовая модуляция (ДИКМ) и дельта модуляция (ДМ).А также их адаптивные модификации таких как: адаптивная дифференциальная импульсно-кодовая модуляция (АДИКМ) и адаптивная дельта модуляция (АДМ).Узнать ихние положительные и отрицательные стороны.
Дифференциальная импульсно-кодовая модуляция.
DPCM – Differencial Pulse Code Modulation.
Как известно, при передаче дискретизированных во времени непрерывных аналоговых сигналов с ограниченным спектром, отсчеты сигналов в соседних точках дискретизации с большой вероятностью мало отличаются друг от друга. Поэтому можно вместо кодирования и дальнейшей передачи отсчетов передавать по каналу связи кодированные значения разности соседних отсчетов, по которым на приемной стороне восстанавливаются значения отсчетов сигнала с АИМ-2. Такой метод и называется дифференциальная импульсно-кодовая модуляция (ДИКМ).
На рис.1 приведены временные диаграммы формирования разностного сигнала с АИМ-1. Осуществляя квантование и кодирование разностей соседних отсчетов, получают цифровой канальный сигнал с ДИКМ.
Р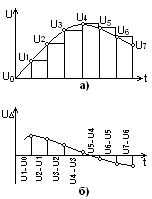 ис.1.
Принципы ДИКМ.
ис.1.
Принципы ДИКМ.
а) – отсчеты UАИМ-2 непрерывного сигнала;
б) разностная амплитуда двух соседних отсчетов UАИМ-1.
Как видно из рисунка, амплитуды разностей отсчетов меньше амплитуд самих отсчетов, поэтому при одинаковом шаге квантования число разрядов в кодовой канальной комбинации при ДИКМ меньше, чем при ИКМ. Уменьшение числа разрядов в кодовой группе при ДИКМ снижает скорость передачи цифрового канального сигнала.
Известно много вариантов технической реализации ДИКМ. Простейшая схема приведена на рис. 2 в виде кодера ДИКМ с декодером в цепи обратной связи.
Рис.2. Структурная схема кодека ДИКМ:
а) – кодер; б) – декодер.
Структурная схема кодера включает в себя:
-
ФНЧ — ограничивающий спектр частот входного непрерывного сигнала до FМАКС;
-
РУ — разностный усилитель, усиливающий разность двух сигналов поступающих на его входы: непрерывного сигнала и ступенчатого сигнала с АИМ-2 на выходе интегратора;
-
АИМ-2 — модулятор, осуществляющий дискретизацию разностного сигнала с частотой Fд;
-
Кодер ИКМ — осуществляющий квантование и кодирование разностного сигнала;
-
Декодер ИКМ — в котором кодовые комбинации преобразуются в дискретные отсчеты разностного сигнала с АИМ-2;
-
Инт(интегратор) — преобразующий разностные амплитудные отсчеты сигнала, поступающего на его вход, в ступенчатую функцию с АИМ-2;
-
ФНЧПР, выделяет из ступенчатой функции непрерывный сигнал с FМАКС.
Если в качестве кодера ИКМ использовать кодер с нелинейной шкалой квантования, в которой шаг квантования изменяется в зависимости от величины разностного сигнала, число шагов квантования еще более уменьшается, а значит уменьшается и скорость передачи цифрового сигнала. Такая модификация получила название адаптивной ДИКМ (АДИКМ).
На практике АДИКМ используется для увеличения числа каналов на местной ТФ сети (в 2 раза по сравнению с обычными ЦСП с ИКМ), а также при передаче канальных сигналов цифрового телевидения (существенно уменьшается скорость передачи цифрового ТВ сигнала).
Дельта модуляция.
DM — Delta Modulation
При рассмотрении принципов ИКМ и ДИКМ предполагалось, что период дискретизации выбран в соответствии с теоремой Котельникова: Тд FМАКС. Однако, если взять период дискретизации существенно меньшим: Тд << FМАКС, то различие между соседними отсчетами непрерывного аналогового сигнала уменьшится и не будет превышать минимального шага квантования , определенного для систем с ИКМ. В этом случае, за каждый период дискретизации при дельта-модуляции Тд ДМ, достаточно передавать в цифровом виде информацию о приращении разности последующего i-го отсчета по отношению к предыдущему (i–1)-му если:
UАИМ-2 i (t) UАИМ-2 i-1 (t)
,то формируется импульсная посылка положительной полярности +1, а если:
UАИМ-2 i (t) < UАИМ-2 i-1(t)
, то отрицательной полярности –1, как показано на рис.3, где Uf т(t) – импульсная последовательность с тактовой частотой при дельта модуляции а UДМ(t) –цифровой дельта-сигнал.
Рис.3. Временные диаграммы получения дельта-кода.
Таким образом, при выбранном шаге квантования , передается информация только о его знаке и для этого достаточно передавать один двоичный символ в каждый момент отсчета. Такой способ формирования канального сигнала называется классической дельта-модуляцией (ДМ).
Простейшая структурная схема модема дельта-модуляции и демодуляции приведена на рис 4.
Рис.4. Структурная схема дельта-модулятора и демодулятора (модема).
Структурная схема модема включает в себя:
-
ФНЧ — ограничивающий спектр частот входного сигнала;
-
РУ — разностный усилитель, усиливающий разность двух поступающих на его входы сигналов: непрерывного аналогового сигнала U(t) и отсчетного значения UАИМ i(t);
-
ГТЧ — генератор тактовой частоты, управляющие импульсы с которого поступают на пороговое устройство ПУ с частотой fт;
-
ПУ — на выходе ПУ возникают импульсы положительной полярности, если U(t) – UАИМ i(t) 0, и импульсы отрицательной полярности, если U(t) – UАИМ2 i(t) < 0;
-
Инт (идеальный интегратор) — на выходе которого формируется ступенчатая во времени функция UАИМ2(t) с интервалом Тд ДМ, и амплитудой каждого отсчета, отличающегося от предыдущего на величину ± .
На приемной стороне в состав модема входят:
-
ФУ — формирующее устройство, восстанавливающее искаженную форму импульсного сигнала;
-
СС — систему синхронизации, выделяющую тактовую частоту fТ из принимаемого цифрового сигнала с ДМ;
-
Инт (идеальный интегратор) — формирующий ступенчатую функцию;
-
ФНЧПР — преобразующий ступенчатую функцию в непрерывный аналоговый сигнал.
При использовании приведенной схемы дельта-модема возможна ситуация, когда ступенчатое напряжение UАИМ2(t) с одинаковым шагом приращения , на участках резкого изменения крутизны непрерывного сигнала ТПЕР не “успевает следить” за изменением U(t). На этих участках возникают специфические, свойственные способу ДМ искажения передаваемых сигналов – перегрузка по крутизне, при этом
UПЕР = U(t) – UАИМ2(t) > .
Для уменьшения шумов перегрузки при ДМ можно увеличивать шаг квантования, но при этом возрастает ошибка квантования, или же при том же шаге квантования увеличить тактовую частоту fТ, что приведет к увеличению скорости передачи цифрового канального сигнала. Поэтому в рассмотренной классической схеме дельта-модулятора при одинаковых с ИКМ шумах квантования тактовая частота fТ или скорость передачи импульсных посылок будет существенно больше. Если в канале ЦСП с ИКМ fТ при передаче ТФ сигнала fТ = Fд* m = 8 кГц * m = 64 кГц, то при ДМ она при тех же шумах квантования должна быть в 2 2,5 раза выше (примерно 150 кГц). По этой причине классическая ДМ практически не используется, а применяется ее модификации.
Тактовая частота в системах передачи с ДМ может быть существенно уменьшена, если для устранения перегрузки по крутизне менять шаг квантования в зависимости от скорости изменения амплитуды передаваемых непрерывных сигналов: если крутизна изменения аналогового сигнала увеличивается, шаг квантования также увеличивается, если крутизна уменьшается, шаг квантования – уменьшается. Такой способ получения цифрового дельта-сигнала называется адаптивной ДМ (АДМ), и является аналогом нелинейного кодирования, но только по крутизне, непрерывного сигнала.
Основными преимуществами АДМ по сравнению с ИКМ являются ее большая помехоустойчивость, связанная с тем, что она менее чувствительная к ошибкам при передаче цифрового сигнала, чем ИКМ, а также простота и надежность выделения тактовой частоты .
В настоящее время известно несколько десятков видов дельта-модуляции. Наиболее перспективными областями ее применения являются абонентские телефонные сети в сочетании с электронными системами коммутации и спутниковые системы связи .