Терморезисторы и уравновешенные, неуравновешенные электроавтоматические мосты и логометры.
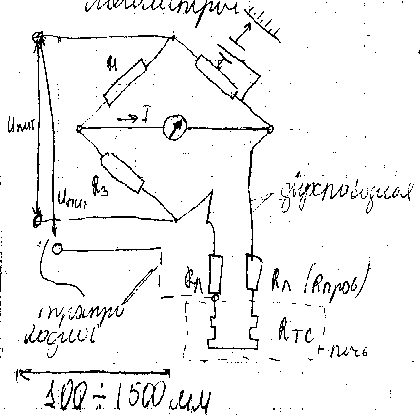
Отсчет производят в момент равновесия моста Iп=0
R1(Rтс-2Rл)=R2R3
![]()
Недостаток: не может уследить за быстрым изменением температуры. Недостаток двухпроводной схемы: результат зависит от окружающей температуры. Чтобы это устранить подключают по трехпроводной схеме.
Rл=Rпр
Iп=0; R1(Rтс+2Rл)= R2(R3+Rл)
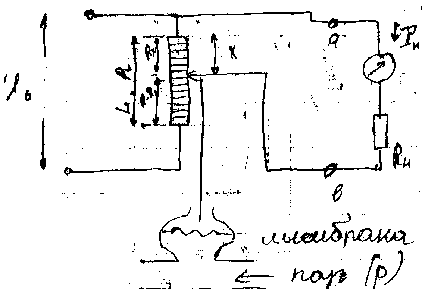
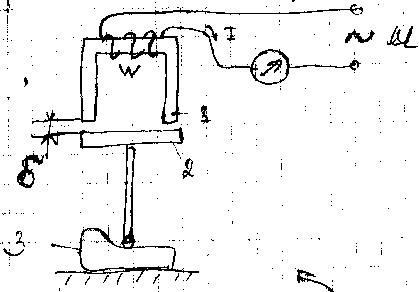
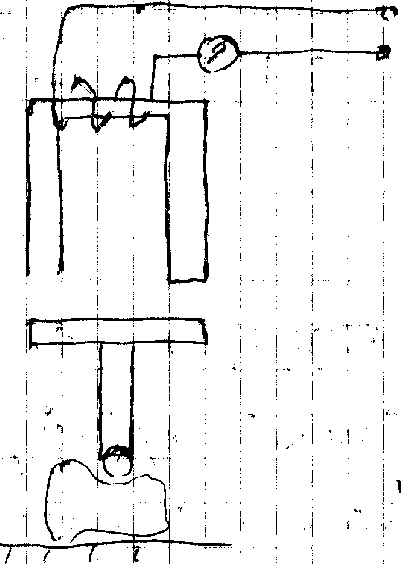
Схема электронного автоматического моста типа КСМ – 2 (Компенсирующая Схема Мостовая). В основу работы положен принцип уравновешивания моста.
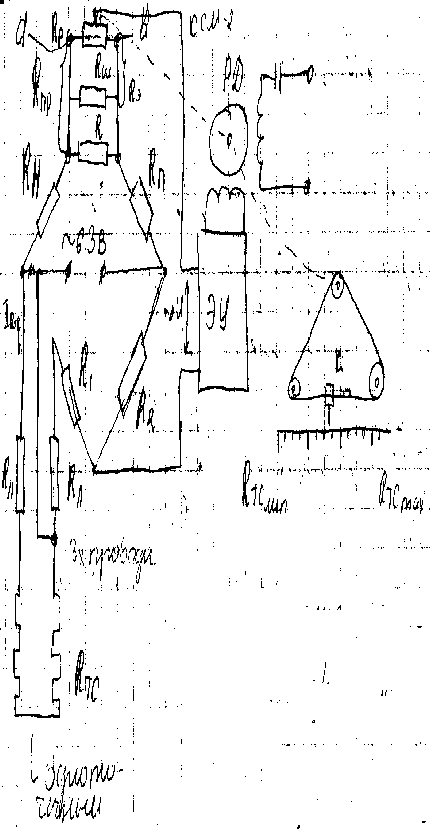
Rп
– подгонка начала шкалы; Rр
– реохорд = 315 Ом (тонкий провод); Rш
– шунт = 126 Ом;
![]() =900Ом;
R
– регулирует размах; Rпр
– приведенное сопротивление; Rн
– ограничивает ток IRтс
(5…7 мА); ЭУ – электромагнитный усилитель;
∆U
– сигнал разбаланса моста; РД –
реверсивный асинхронный двухфазный
двигатель переменного тока; К – каретка
(стрелка).
=900Ом;
R
– регулирует размах; Rпр
– приведенное сопротивление; Rн
– ограничивает ток IRтс
(5…7 мА); ЭУ – электромагнитный усилитель;
∆U
– сигнал разбаланса моста; РД –
реверсивный асинхронный двухфазный
двигатель переменного тока; К – каретка
(стрелка).
Уравнение равновесия моста для начала шкалы.
Ползунок в точке b
R2(Rтсmin+Rл+Rн)= (Rп+Rпр) (R1+Rл)
Мосты бывают 1, 3, 6, 12, 24 – х точечные.
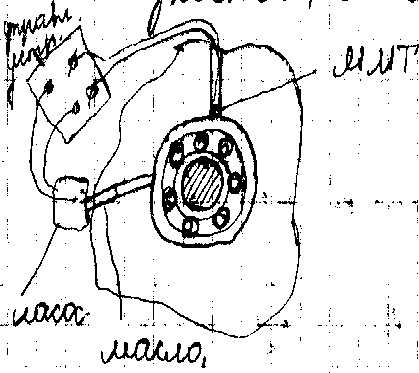
Полупроводниковый терморезистор (термистры) из оксидов металлов: CuO, MnO, CaO
ММТ-1 (медно-марганцевый), КМТ-У(кадмиево-марганцевый).
![]() В
– постоянный коэффициент, зависит от
примесей.
В
– постоянный коэффициент, зависит от
примесей.
![]()
![]() -
термический коэффициент сопротивления
-
термический коэффициент сопротивления
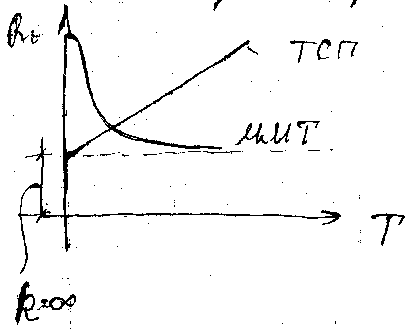
Достоинства: 1. Малые габариты и вес МКМТ-16 (Малогабаритный …) l=1.5мм, d=0,5мм.
2. Высокая чувствительность SММТ=20…60SТСП (Rл=2,5Ом)
3. Подключают к измерительным сх. по двухпроводным сх. т.к. при 20 С R=106Ом, а сопротивление проводов л=2,5Ом (можно пренебречь).
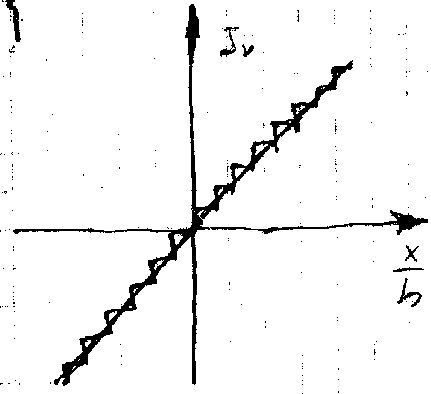
Недостатки: характеристика не линейна и не проходит через ноль.
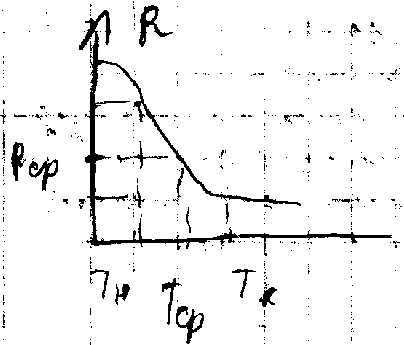
Rш=F(Rн, Rср, Rк, Tн, Tср, Tк)

2. Большой разброс параметров термисторов одного типа.
3. Небольшой диапазон измерений ∆Т=50…120С
Применяют для измерения температуры воздуха, жидкости, смеси, подшипников.
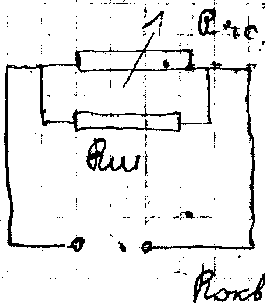
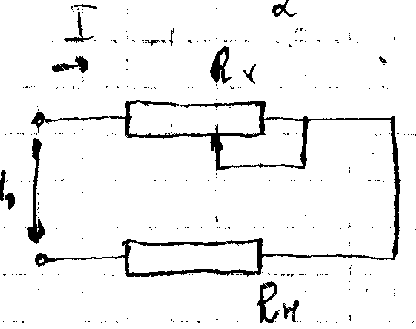
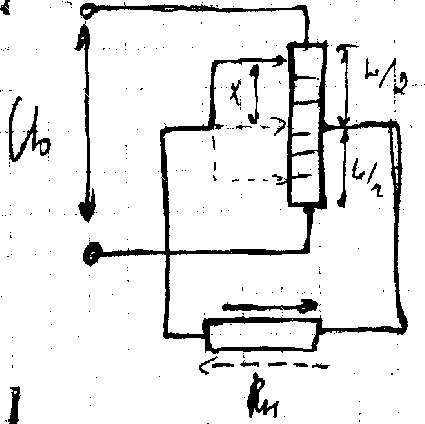
Реостатные (потенциометрические) датчики.
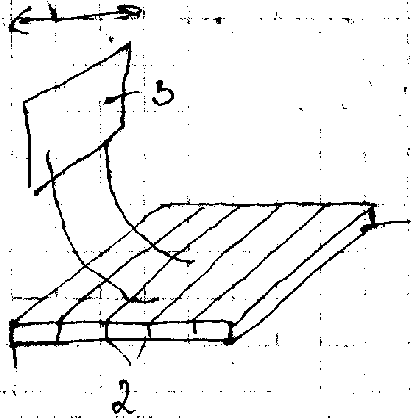
каркас из изолированного материала; 2 – провод намотки; 3 – ползун.
Реостатная схема
![]()
Потенциометрологический датчик в автомобильном баке
Величину тока нагрузки I определим из теоремы об эквивалентном генераторе
![]() хх
– холостой ход
хх
– холостой ход
Ri – внутреннее сопротивление источника
![]()
![]()

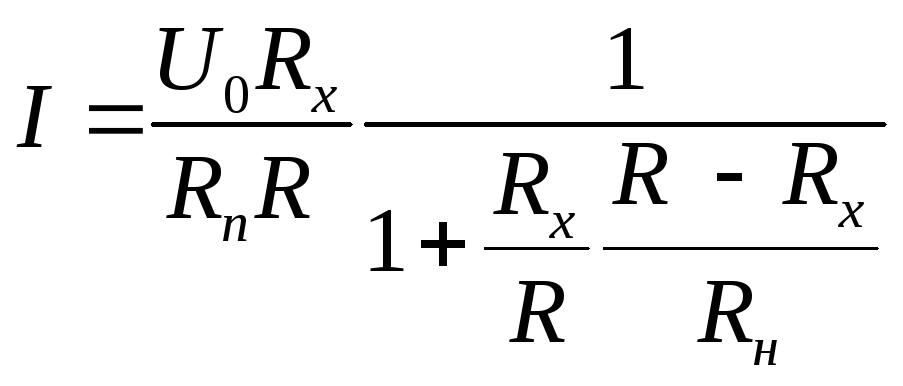
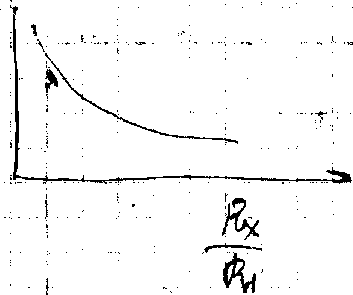
пусть R = kh, Rx=kx
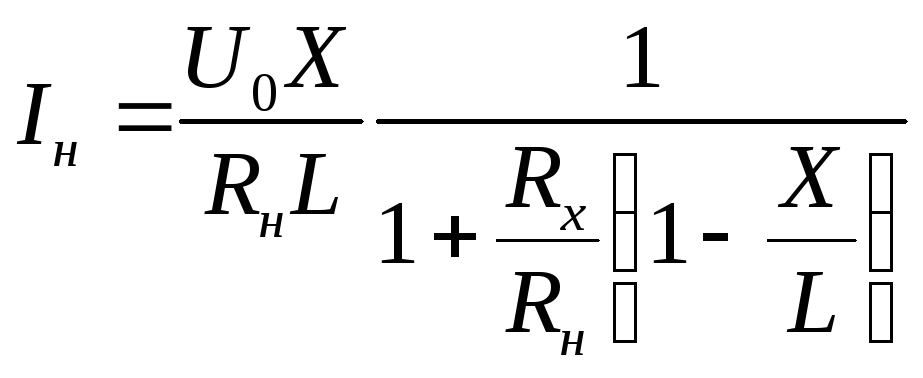 ,
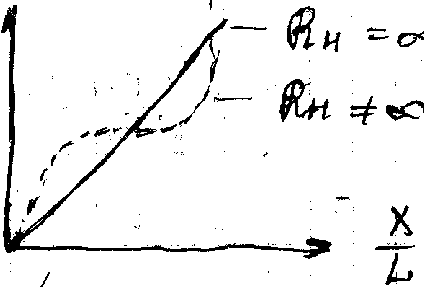
при Rн>>Rд
= R(Rx)
=> при Rн>>10Rд
,
при Rн>>Rд
= R(Rx)
=> при Rн>>10Rд
![]()
Для получения регрессивной характеристики реостатные датчики включают по мостовой схеме и реостат со средней точкой

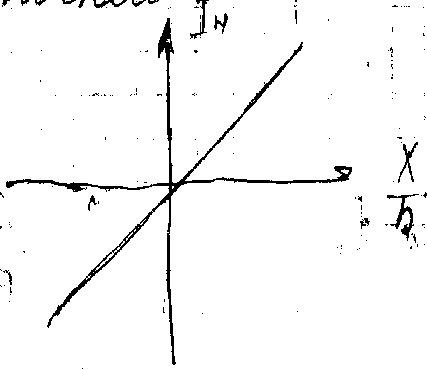
Потенциометры со средней точкой.
Достоинства: высокая мощность выходного сигнала, может работать на постоянном и переменном токе, простота и надежность.
Недостатки: результат зависит от температуры окружающей среды, ступенчатость изменения выходного тока, связанный с кратковременном разрывом цепи при переходе ползунка с одного витка на другой, значительные усилия для перемещения ползунка.
Для измерения уровня, давления в ограничителях, грузоподъемниках, кранах в качестве датчика вал двигателя (реостат обратной связи).
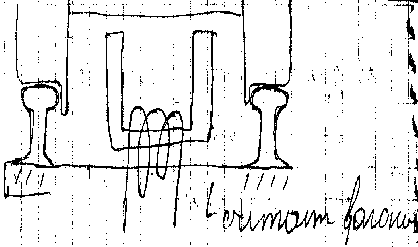
Индуктивные датчики.
В них измеряемая величина преобразуется в изменение индуктивности. Бывают двух типов:
Замкнутая магнитная цепь:
Плунжерного типа:
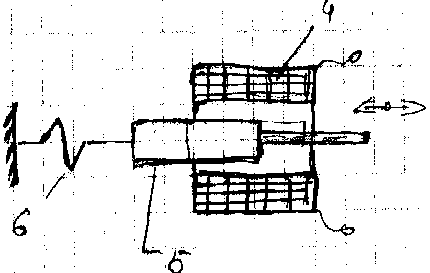
1 – сердечник с проволокой (катушка n витков); 2 – якорь; 3 – деталь; 4 – катушка; 5 – плунжер; 6 – противодействующая пружина.
![]() Rk<<wL
=>
Rk<<wL
=>
![]()
 Rk
– активное сопротивление магнитопровода
Rk
– активное сопротивление магнитопровода
![]() -
задан. Т.к.
-
задан. Т.к.
![]() >>Rk
>>Rk
![]()
=>
![]()

при
![]()
бесконечность, L0,
Iбеск.
бесконечность, L0,
Iбеск.
Rн≠0, I≠0
Недостатки: 1) Нелинейная статическая характеристика, не проходит через 0, не рверсивна (ток не меняет своего направления на противоположное при изменении перемещения). 2) Ток протекающий по катушки зависит от частоты и напряжения источника и внешней температуры. 3) Мал диапазон измерений.
Применяют для измерения деформации, прогибов, в качестве бесконтактных счетчиков и конечных выключателей. Бесконтактный конечный выключатель БК
Счетчик: