

Основные характеристики датчиков.
Функция преобразования измерительного прибора – это статистическая характеристика первичного преобразователя или функциональная зависимость выходной величины от входной представленная формулой или графиком.
В случае аналогового датчика всегда стремятся иметь линейную характеристику преобразования, упрощающую анализ прибора.
Погрешность – это качество измерительного прибора.
Погрешность бывает:
-
Инструментальная (недостаточное качество узлов, трение, влияние температуры на узлы);
-
Методическая (влияние температурного расширителя жидкости, гже объем контролируется датчиком уровня).
Характеристика датчика – это зависимость между электрическим параметром датчика и измеряемой неэлектрической величиной:
M = f(N), где:
М – электрическая величина (параметр);
N – измеряемая неэлектрическая величина.
Области чувствительности датчиков.

-
Нормальная чувствительность датчика;
-
Неудовлетворительная чувствительность датчика;
-
Нет чувствительности.
Порог чувствительности прибора – это наименьшее значение измеряемой величины, вызывающее заметное на фоне помех измерения результат измерения.
Различают:
-
Абсолютные первичные преобразователи (датчики абсолютных значений) – имеют однозначную зависимость между входной величиной и выходным кодом;
-
Инкрементные первичные преобразователи (датчики накапливающего типа и датчики приращений) – монотонное изменение входной величины вызывает последовательность импульсов на выходе.
Инертность датчика – это время, в течении которого выходная величина принимает значение соответствующее входной величине.
Статическая характеристика датчика – это зависимость изменения входных величин.
Чувствительность датчика – это отношение приращения выходной величины к приращению входной величины.
Чувствительность датчика – это коэффициент передачи датчика.
Устройство и принцип работы датчиков.
По назначению в САУ датчики можно разделить на датчики: пути и положения рабочих органов, скоростные, силовые, углового положения или угла рассогласования, размерные, тепловые, и т. д.
Эти
датчики обеспечивают создание управляющих
сигналов в зависимости от пройденного
пути или положения рабочих органов
управляемого объекта. Датчики пути и
положения рабочих органов различают
на :
Электроконтактные
датчики представляют собой
конечные путевые включатели,
микропереключатели.
У датчиков имеются штоки или рычаги 2,
которые воздействуют через механизм
передачи на контакты 1.

Принцип
действия датчиков основан на том, что
их устанавливают на неподвижных частях
рабочих органов в определенном положении,
а движущиеся рабочие органы, на которых
укреплены кулачки, достигнув заданного
положения воздействуют на датчики,
вызывая их срабатывание.
Индуктивные датчики.
Принцип их действия основан на изменении индуктивности катушки с подвижным якорем вследствие изменения магнитной проницаемости. Индуктивные датчики, как электроконтактные, можно использовать как датчики пути или положения и как размерные. Если перемещать якорь 1 датчика, воздушный зазор δ будет изменяется, что вызовет изменение индуктивности обмотки ω>Д. Сила тока в цепи обмотки датчика:
где
Z
- полное сопротивление цепи; CП
-
напряжение питания датчика;
R
- активное сопротивление цепи; XL
= 2πfL
-индуктивное
сопротивление обмотки.
Если
UП
, R,
f
постоянны, то сила тока I
в катушке, а следовательно,
в напряжении U
будут пропорциональны воздушному
зазору δ,
т. е. U=I=кδ.
Датчики
работают при частоте питающей сети 50
– 5000 Гц.

Фотоэлектрические датчики.
Фотоэлектрические датчики представляют собой обычное фотореле установленное на рабочий орган (ДРО), переместившись в установленное положение, экраном перекрывает поток света Ф, вызывая срабатывание фотореле (ФР). В промышленности применяют также размерные фотоэлектрические датчики.
Фотоэлектрический размерный датчик состоит из диска, который соединен с ДРО. На диске нанесены штрихи или прорези с определённым шагом t. При движении рабочего органа штрихи на диске перекрывают световой поток Ф, вызывая срабатывание фотореле. Изменение перемещение ∆L = nt, где n — число срабатывания фотореле; t — цена деления шага. Имеются датчики, которых в качестве измерительных шкал применяют линейки с нанесенными штрихами.

Датчики углового положения.
Датчики углового положения создают управляющий сигнал в зависимости от углового положения или угла рассогласования между рабочими органами.
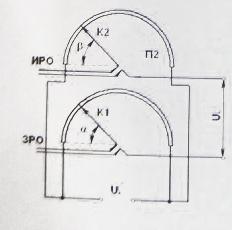 Потенциометрический
датчик.
Потенциометрический
датчик.
Потенциометрический датчик состоит из потенциометров П1 и П2, которые подключены параллельно к общему источнику питания Uп.
Подвижные контакты потенциометров К1 и К2 соответственно соединены механически с задающим (ЗРО) и исполнительным (ИРО) рабочими органами.
Напряжение, снимаемое с подвижных контактов потенциометров, является напряжением сигнала Uc .
При согласованном положении рабочих органов (подвижные контакты находятся в одинаковом положении), когда α≠β, напряжение сигнала равно нулю. При рассогласованном положении, когда α≠β, сигнал датчика на выходе не равен нулю, т.е. Uc ≠ 0. Причем сигнал будет пропорционален углу рассогласования т. е. Uc = α – β, а знак сигнала Определяет направление рассогласования (Uc ≠ 0 означает, что Uc > 0 или Uc <0 т. е. сигнал соответственно положительный или отрицательный).
Сельсины.
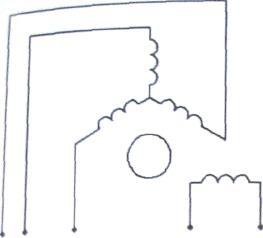
Сельсины представляют собой трансформаторы с воздушным зазором, у которых при вращении ротора происходит плавное изменение величины ЭДС, наведённое в обмотке ротора. Обычно сельсины работают в паре: сельсин, связанный с ведомым валом, называют сельсином-приемником, а сельсин, связанный с ведущим валом, - сельсином-датчиком.
Однофазная обмотка сельсина расположена на статоре, а трёхфазная — на роторе. Трехфазная обмотка состоит из трех катушек, сдвинутых относительно друг друга на 120°. Они уложены в пазы ротора и соединены в звезду. Концы фазовых (C1, C2, СЗ) обмоток выведены на три контактных кольца, расположенных на валу ротора.
Датчики скорости.
Датчики скорости создают управлявшие сигналы в зависимости от скорости.
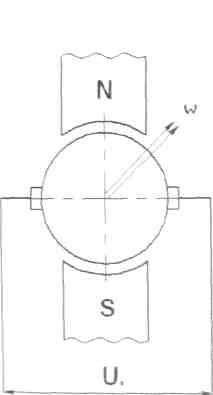
Тахогенераторы.
Тахогенераторы служат для изменения частоты вращения. В зависимости от рода тока различают тахогенераторы постоянного и переменного тока. Тахогенераторы постоянного тока разделяют по способу возбуждения на тахогенераторы с возбуждением от постоянных магнитов и с электромагнитным возбуждением. Те и другие представляют малогабаритную машину постоянного тока. Напряжение на зажимах якоря пропорционально частоте вращения вала якоря, т. е. E = Uя= кеФω, где Е - ЭДС, индуцируемая в обмотке якоря; Ф - поток возбуждения; ке - конструктивный коэффициент машины.
По принципу действия тахогенераторы переменного тока делят на синхронные и асинхронные. Конструкция асинхронного тахогенератора подобна конструкции двухфазного асинхронного двигателя. Тахогенератор имеет две обмотки: обмотку возбуждения(ОВ) и выходную обмотку. При вращении ротора в выходной обмотки наводится ЭДС, пропорциональная частоте вращения.

Силовые датчики.
Силовые датчики обеспечивают создание управляющих сигналов в зависимости от сил, создаваемых в рабочих органах.
Пьезометрические датчики. Пьезометрические датчики для измерения сил представляют собой кварцевую пластину 1. С двух сторон на неё напылены или приклеены токопроводящим клеем электроды 2, с которых снимается выходное напряжение.
Два электрода и кварцевый диэлектрик образуют конденсатор, на электродах которого присутствуют электрические заряды, возникающие вследствие прямого пьезоэлектрического эффекта при сжатии кварцевой пластины силой Р.

Электрический заряд пропорционален сжимающей силе P:Q=αP, где α - коэффициент пропорциональности, называемый пьезомодулем. Под действием изменяющейся силы Р на электродах датчика появляется выходное напряжение
где Сд - емкость датчика; См - монтажная ёмкость. Выходное напряжение датчиков изменяется от единиц милливольт до единиц вольт.
Вывод по работе: В ходе работы изучил конструкции, устройство и принцип работы датчиков; сняли и построили статистические характеристики и определили рабочую зону.
Компетенции:
Общие компетенции: Сигнал, классификация датчиков, устройство, характеристика датчиков.
Профессиональные компетенции: Научился снимать статическую характеристику индуктивного датчика, находить область чувствительности датчика.
Основные понятия о датчиках.
|
№ |
Название термина |
Определение |
Изучение |
||
|
До УТС |
Раздел |
После УТС |
|||
|
1 |
Датчик |
термин систем управления, первичный преобразователь, элемент измерительного, сигнального, регулирующего или управляющего устройства системы, преобразующий контролируемую величину в удобный для использования сигнал |
|
|
|
|
2 |
Сигнал |
изменение некоторой физической величины, служащее для регистрации события. |
|
|
|
|
3 |
Электрический дискретный сигнал |
это сигнал, характеризующийся состоянием: 1 – указывающий наличие сигнала и 0 – указывающий на отсутствие сигнала |
|
|
|
|
4 |
Чувствительность датчиков |
Отношение приращения выходной величины к входной |
|
|
|
|
5 |
Порог чувствительности датчиков |
Это наименьшее значение выходной величины, которая вызывает появление сигнала |
|
|
|
|
6 |
Инертность датчика |
Это время, в течении которого выходная величина принимает значение соответствующее входной величине |
|
|
|
|
7 |
Характеристика преобразования датчика |
Это зависимость между электрическим параметром и параметром датчика измеряемой неэлектрической величиной |
|
|
|
|
8 |
Параметрический датчик |
Это устройство, которое преобразует управляемую величину в параметр электрической цепи |
|
|
|
|
9 |
Генераторный датчик |
Это устройство, которое преобразует неэлектрическую энергию входного сигнала, пропорционально значению выходного сигнала |
|
|
|
|
10 |
Ёмкостной датчик |
Это измерительный преобразователь в виде электрического конденсатора, ёмкость которого измеряется пропорционально значению выходного сигнала |
|
|
|
|
11 |
Индуктивный датчик |
Это устройство, которое преобразует угловое или линейное перемещение в электрический сигнал |
|
|
|
|
12 |
Фотоэлектрический датчик |
Это устройство, которое преобразует в электрический сигнал различные неэлектрические величины |
|
|
|
|
13 |
Датчик пути и положения |
Это устройство, предназначенное для создания управляющего сигнала в зависимости от пройденного пути или положения рабочих органов управляемого объекта |
|
|
|
|
14 |
Датчик углового положения |
Это устройство, предназначенное для создания управляющего сигнала в зависимости от углового положения и угла рассогласования между рабочими органами. |
|
|
|
|
15 |
Датчик скорости |
Это устройство, предназначенное для создания управляемого сигнала в зависимости от скорости вращения рабочих органов |
|
|
|
|
16 |
Силовой датчик |
Это устройство, предназначенное для создания управляющего сигнала в зависимости от сил создаваемых в рабочих органах |
|
|
|
|
17 |
Сельсин |
Это индукционная машина высокой точности, используемая в качестве датчиков в обратной связи по положению. |
|
|
|