

6.2.2. Апроксимація перехідної характеристики ланцюжком однакових аперіодичних ланок
Об`єкти керування, що мають S-образні перехідні характеристики зручно описувати передаточною функцією виду:
![]() (6.20)
(6.20)
Визначенню підлежать параметри Т і n ( k – визначається на попередньому етапі).
Вихідні дані для розрахунків ті ж що і у випадку апроксимації аперіодичною ланкою 1-го порядку.
Функцію W(p) розкладують в ряд за степенями р по формулі Ньютона:
![]() , (6.21)
, (6.21)
де
А1=
nT;
. ![]()
Використовуючи експериментальну перехідну характеристику обчислюють S и S1 за формулами:
![]() (6.22)
(6.22)
Коефіцієнти А1 и А2 є аналогами S и S1. Тому на основі виразів (6.21) – (6.22) можна записати:
 (6.23)
(6.23)
Звідки
![]()
![]() (6.24)
(6.24)
Оскільки по визначенню n є цілим числом, то
![]() (6.25)
(6.25)
де int(a) – найбільше ціле до а число, що не перевищує його.
Обчислені за (6.24) значення n и Т є початковими для пошуку їхніх оптимальних значень, тобто таких, при яких досягався мінімум критерію І (6.19).
Апроксимуюча перехідна характеристика розраховується за формулою:
 (6.26)
(6.26)
де
![]()
Мінімум функції І визначається шляхом варіювання n з кроком 1. Спочатку n збільшують. Якщо просування у цьому напрямку призводить до зменшення І, то n продовжують збільшувати до першого невдалого кроку. Потім здійснюється повернення на один крок і відповідне йому значення Т и n вважаються оптимальними.
6.2.3. Апроксимація перехідної характеристики аперіодичною ланкою другого порядку і ланкою запізнювання.
Структура передаточної функції об`єкта має вигляд (6.9).
Вихідними даними для апроксимації є перехідна характеристика об`єкта, яка задана у виді ординат із сталим кроком.
Коефіцієнт передачі об`єкта визначається на попередньому етапі.
Сума S сталих часу та часу запізнювання у функції (6.9) дорівнює площі між нормованою перехідної характеристикою та лінією її усталеного значення.
Величина
S обчислюється численним методом і
повідомляється користувачеві. Користувач
розподіляє S між окремими сталими часу
и вводить значення
![]() .
.
Програма обчислює нормовану перехідну характеристику і виводить на екран дисплея графіки експериментальної і розрахункової характеристики. На екран виводиться також точність апроксимації І, що обчислюється за формулою (6.19).
Користувач оцінює результат апроксимації і приймає рішення про закінчення роботи, або продовжує обчислення для інших варіантів розподілу S.
6.2.4. Апроксимація перехідної характеристики методом Симою
Метод Симою є універсальним методом апроксимації, що дозволяє отримати апроксимуючі вирази будь-якого порядку. Цей метод дуже зручний для обробки на ЕОМ, він легко алгоритмізується та відрізняється великою точністю.
Апроксимуючою залежністю є дробно-раціональна передаточна функція виду:
 (6.27)
(6.27)
Невідомі
коефіцієнти
![]() визначають із наступної системи рівнянь:
визначають із наступної системи рівнянь:
 (6.28)
(6.28)
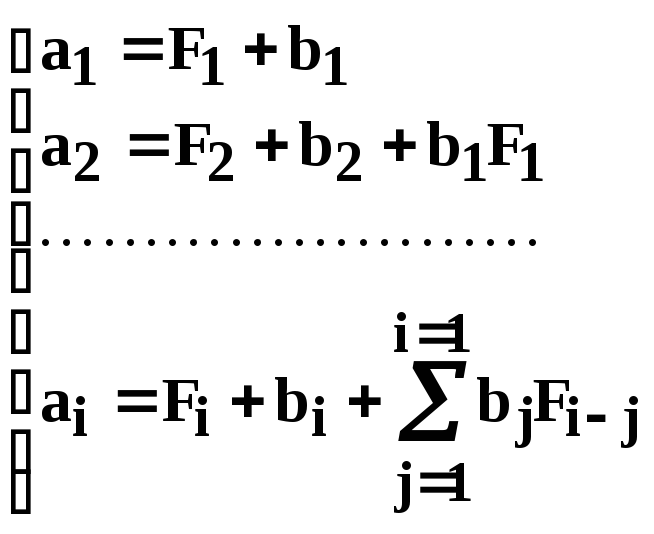
Коефіцієнти
![]() в системі рівнянь (6.28) розраховується
по формулам:
в системі рівнянь (6.28) розраховується
по формулам:
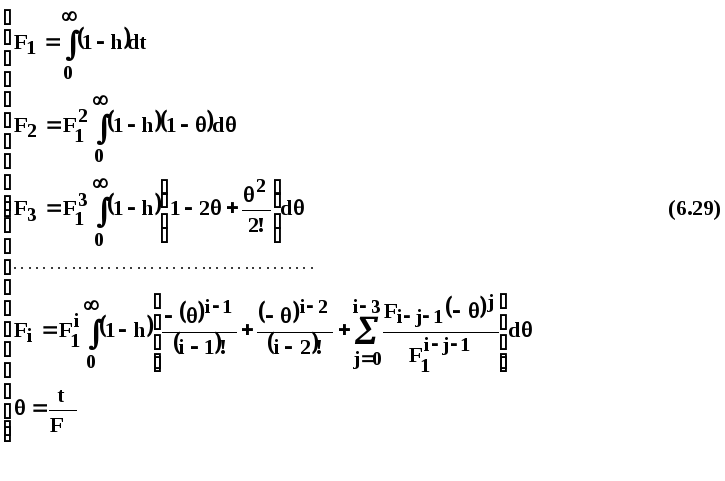
Коефіцієнти
![]() зв`язані з перехідною характеристикою
інтегральними залежностями ( Див. рис.
6.3)
зв`язані з перехідною характеристикою
інтегральними залежностями ( Див. рис.
6.3)
h(t)
1







![]()
t

Рисунок
6.3 -
Зв`язок коефіцієнта
![]() з перехідною характеристикою.
з перехідною характеристикою.