

Матрица поворота в двумерном пространстве
В двумерном пространстве поворот можно описать одним углом θ со следующей матрицей линейного преобразования в декартовой системе координат:
![]()
Положительным углам при этом соответствует вращение вектора против часовой стрелки в обычной, правосторонней системе координат, и по часовой в левосторонней системе координат.
Сам поворот происходит путём умножения матрицы поворота на вектор
Матрица поворота в трёхмерном пространстве
Матрицами вращения вокруг оси декартовой правой системы координат на угол α в трёхмерном пространстве являются:
-
Вращение вокруг оси x:
 ,
,
-
Вращение вокруг оси y:
 ,
,
-
Вращение вокруг оси z:
 ,
,
В трёхмерном пространстве для описания поворота можно использовать
-
три угла, например, углы Эйлера (γ,β,α),
-
угол поворота θ и единичный вектор оси вращения
 ,
, -
матрицу поворота 3x3,
-
кватернион.
Матрицы поворота вектора в декартовой системе координат, соответствующие первым двум способам задания поворота:

и

Однако,
поскольку умножение матриц не коммутативно,
то есть:
![]() ,
следовательно, положение системы
координат после поворота вокруг трех
осей будет зависеть от последовательности
поворотов, то существует 6 различных
видов матрицы поворота:
,
следовательно, положение системы
координат после поворота вокруг трех
осей будет зависеть от последовательности
поворотов, то существует 6 различных
видов матрицы поворота:
-
1) Поворот около осей: X -> Y -> Z
-
2) Соответственно: X -> Z -> Y
-
3) Y -> X -> Z
-
4) Y -> Z -> X
-
5) Z -> X -> Y
-
6) Z -> Y -> X
Получить же нужную матрицу можно путем последовательного перемножения матриц поворота около одной оси (приведенных выше) в соответствии с желаемым порядком.
Билет 33. Свойства обратной матрицы
33) Обра́тная ма́трица — такая матрица A−1, при умножении на которую исходная матрица A даёт в результате единичную матрицу E:
![]()
1)![]() ,
где
,
где
![]() обозначает
определитель.
обозначает
определитель.
2)![]() для
любых двух обратимых матриц A
и B.
для
любых двух обратимых матриц A
и B.
3)![]() где
* T
обозначает транспонированную матрицу.
где
* T
обозначает транспонированную матрицу.
4)![]() для
любого коэффициента
для
любого коэффициента
![]() .
.
5)Если необходимо решить систему линейных уравнений Ax = b, (b — ненулевой вектор) где x — искомый вектор, и если A − 1 существует, то x = A − 1b. В противном случае либо размерность пространства решений больше нуля, либо их нет вовсе.
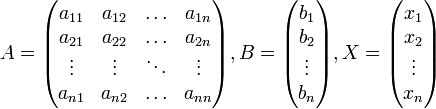
Матричный метод решения (метод решения через обратную матрицу) систем линейных алгебраических уравнений с ненулевым определителем состоит в следующем.
Пусть дана система линейных уравнений с n неизвестными (над произвольным полем):

Тогда её можно переписать в матричной форме:
AX = B, где A — основная матрица системы, B и X — столбцы свободных членов и решений системы соответственно:
Умножим это матричное
уравнение слева на A
− 1 —
матрицу, обратную к матрице A:
![]()
Так как A − 1A = E, получаем X = A − 1B. Правая часть этого уравнения даст столбец решений исходной системы. Условием применимости данного метода (как и вообще существования решения неоднородной системы линейных уравнений с числом уравнений, равным числу неизвестных) является невырожденность матрицы A. Необходимым и достаточным условием этого является неравенство нулю определителя матрицы A:
![]() .
.
Для однородной системы линейных уравнений, то есть когда вектор B = 0, действительно обратное правило: система AX = 0 имеет нетривиальное (то есть ненулевое) решение только если det A = 0. Такая связь между решениями однородных и неоднородных систем линейных уравнений носит название альтернативы Фредгольма.
Билет 34. Теорема о связи решений однородной и неоднородной СЛАУ.
Неоднородная система: Ax=B, B≠0.
Однородная система: Ах=0.
Теорема: 1. Если вычесть два решения неоднородной системы, то получится решение однородной системы.
2. Если к решению неоднородной системы прибавить решение однородной системы, то получится решение неоднородной системы.
Доказательство:
1) с1,с2 – два решения неоднородной системы.
Ас1=В; Ас2=В. Из первой системы вычтем вторую систему: Ас1-Ас2=0; А(с1-с2)=0; с1-с2 – решение однородной системы.
2) Асн=В – решение неоднородной системы.
Асо=0 - решение однородной системы.
Асн+ Асо=В. А(сн+ со)=В. сн+ со – решение неоднородной системы.
Билет 35. Несовместность СЛАУ. Метод Гауса.
Если система решений не имеет, то она называется несовместной.
Алгоритм решения СЛАУ методом Гаусса подразделяется на два этапа:
1)На первом этапе осуществляется так называемый прямой ход, когда путём элементарных преобразований над строками систему приводят к ступенчатой или треугольной форме, либо устанавливают, что система несовместна. А именно, среди элементов первого столбца матрицы выбирают ненулевой, перемещают его на крайнее верхнее положение перестановкой строк и вычитают получившуюся после перестановки первую строку из остальных строк, домножив её на величину, равную отношению первого элемента каждой из этих строк к первому элементу первой строки, обнуляя тем самым столбец под ним. После того, как указанные преобразования были совершены, первую строку и первый столбец мысленно вычёркивают и продолжают пока не останется матрица нулевого размера. Если на какой-то из итераций среди элементов первого столбца не нашёлся ненулевой, то переходят к следующему столбцу и проделывают аналогичную операцию.
2)На втором этапе осуществляется так называемый обратный ход, суть которого заключается в том, чтобы выразить все получившиеся базисные переменные через небазисные и построить фундаментальную систему решений, либо, если все переменные являются базисными, то выразить в численном виде единственное решение системы линейных уравнений. Эта процедура начинается с последнего уравнения, из которого выражают соответствующую базисную переменную (а она там всего одна) и подставляют в предыдущие уравнения, и так далее, поднимаясь по «ступенькам» наверх. Каждой строчке соответствует ровно одна базисная переменная, поэтому на каждом шаге, кроме последнего (самого верхнего), ситуация в точности повторяет случай последней строки.
Билет 36. Прямая с угловым коэффециентом. Угол между 2-мя прямыми. Пучок прямых.
Уравнение y=kx+b называется уравнением прямой с угловым коэффициентом; k - угловой коэффициент, b - величина отрезка, который отсекает прямая на оси Оу, считая от начала координат. Тангенс угла наклона прямой к оси Ох называется угловым коэффициентом прямой. k=tg(альфа).
Угол между двумя прямыми:
Первая прямая: L1, n1(p1,q1,r1).
Вторая прямая: L0, n0(p,q,r).
L1// L0; n1// n0; p1/р=q1/q= r1/r – условие параллельности 2 прямых.
L1﬩ L0; n1﬩n0; (n1,n)=0; pp1+qq1+rr1=0 – условие параллельности 2 прямых.
Cosφ=(n1,n)/|n1|*|n0|
В плоскости Лобачевского две прямые могут либо пересекаться, либо могут быть параллельными в некотором направлении, либо расходящимися. Поэтому в плоскости Лобачевского существует три вида пучков прямых:
1) пучок прямых, пересекающихся в одной точке, называемой центром пучка; такой пучок называется центральным или эллиптическим;
2) пучок прямых, параллельных в заданном направлении некоторой прямой, называемой осью пучка; такой пучок называется параболическим;
3) пучок расходящихся прямых, перпендикулярных к некоторой прямой, называемой базой пучка; такой пучок называется гиперболическим.
|
Билет 37. Взаимное расположение прямых на плоскости. Расстояние от точки до прямой. |
|
Взаимное расположение прямых на плоскости.
Прямые линии в пространстве могут быть параллельными, пересекающимися и скрещивающимися. Рассмотрим подробнее каждый случай.
1. Параллельные прямые линии.
Параллельными называются две прямые, которые лежат в одной плоскости и не имеют общих точек.
Проекции параллельных прямых на любую плоскость (не перпендикулярную данным прямым) - параллельны. Если AB//CD то A1B1//C1D1; A2B2//C2D2; A3B3//C3D3(рис.33). В общем случае справедливо и обратное утверждение.