

Кулисные механизмы
Кулисные механизмы предназначены для преобразования вращательного движения входного звена во вращательное движение выходного звена. Обычно в приборах (РЗГ) применяются в качестве промежуточных преобразователей между рычажной передачей и зубчатой передачей.
|
КМ с параллельными осями sin типа |
|
||||
|
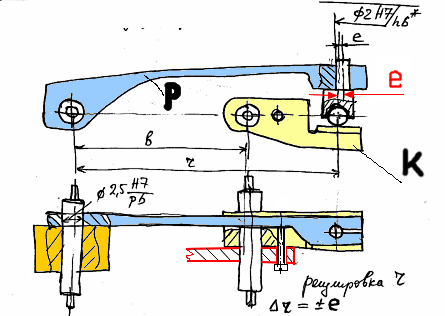
b- расстояние между опорами, R- Длина рычага.
1-Кулиса 2- рычаг. |
Функция преобразования:
Схемные параметры:
|
|
|||
|
КМ с параллельными осями sin типа модифицированный |
|
||||
|
|
Функция преобразования:
Схемные параметры:
|
|
|||
|
КМ с параллельными осями tg типа |
|
||||
|
|
Функция преобразования:
Схемные параметры:
|
|
|||
|
КМ с параллельными осями tg типа модифицированный |
|||||
|
|
Функция преобразования:
Схемные параметры:
|
||||
|
Кулисные ПМ с пересекающимися осями Это - пространственные ПМ. Оси перпендикулярны и лежат в одной плоскости. В этой же плоскости в начальном положении находится и центр контактирующего элемента – СФЕРЫ. Второй контактирующий элемент плоскость расположена в нач. положении // плоскости осей механизма.
КМ с пересекающимися осями sin типа |
|||||
|
|
Функция преобразования:
Схемные параметры:
|
||||
|
КМ с пересекающимися осями tg типа |
|||||
|
|
Функция преобразования:
Схемные параметры:
|
||||
|
Поводковые механизмы Оси Поводковых механизмов могут пересекаться под углом 90º или отличным от него. Оси механизма лежат в параллельных плоскостях, отстоящих друг от друга на расстоянии, равном сумме радиусов контактирующих цилиндров. Поводковый Механизм sin типа |
|||||
|
|
Функция преобразования:
Схемные параметры:
Если =1 , то =0, означает ли это линейность ФП ??? |
||||
|
Поводковый Механизм tg типа |
|||||
|
|
Функция преобразования:
Схемные параметры:
|
||||

















Конструирование Рычажных ПМ.





Дисбаланс звеньев пм и его расчет
(Для к/п)
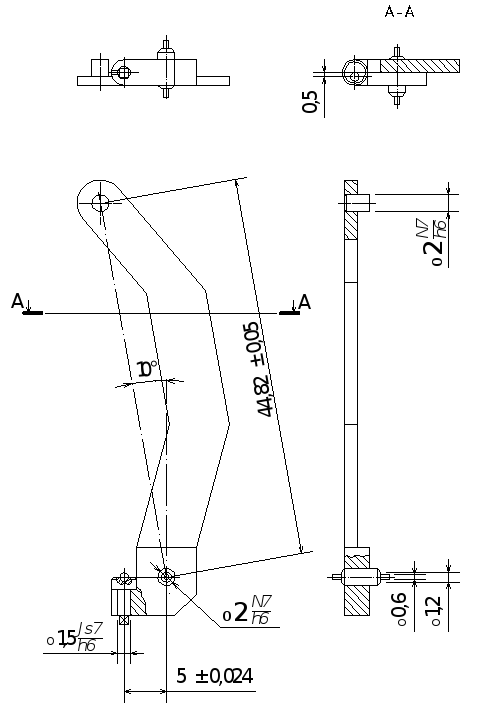
Появление момента от дисбаланса звена ПМ связано с тем, что центр масс звена находится не на оси вращения и, таким образом, даже в неподвижном состоянии в механизме возникают моменты и силы, обусловленные наличием гравитации, которые стремятся повернуть звенья, создают силовое воздействие на взаимосвязанные звенья.
Эту проблему надо обязательно учитывать при проектировании звеньев, выборе их конфигурации, материалов и пространственного расположения в приборе и машине.
Форма звеньев в механизмах техн. систем очень разнообразна: есть и симметричные детали асимметричные, у которых ц.т. не лежит на оси вращения.
На Рис. приведена конструкция рычага кулисного механизма тангенсного типа с параллельными осями.
|
|
|
|
Большая часть изгибов и прочих, кажущихся, “излишеств” формы обусловлена конструкцией всего прибора в сборе (детали не должны задевать друг за друга, при этом быть компактными и легкими). Однако конструкция звена также играет решающую роль с точки зрения получение момента дисбаланса.
