

3.5. Методы регулировки передаточных механизмов
Регулировка бывает:
- математической - решение задачи оптимального синтеза по критерию близости fТеор и f Ном )
- физической - изменение размеров звеньев с целью установления требуемых значений параметров ПМ: передаточного отношения (чувствительности) , нелинейности , начального положения звеньев и др.
Математическая регулировка.
3.5.1. Регулировка по Методу Наименьших Квадратов (мнк)
Оптимальное соотношение Схемных Парам. чувствительности, нелинейности и диапазона :
![]() ()
()
Выражение для CX(х) с учетом (*)
![]()
График (кубич. парабола):

Исследование функции CX(х) позволяет определить корни уравнения при приравнивании CX(х) нулю:
 - ур-е
кубич. Параболы
- ур-е
кубич. Параболы
Корни
:
![]()
Экстремальные значения
CX нб = 0,05 ( /) Dx2
CX мах= 0,022 ( /) Dx2
Точки регулировки выбираем при значениях х, при которых погрешность схемы CX(х)=0 – это корни уравнения (**)
![]()
Минимальное среднеквадратическое значение погрешности схемы приведенное ко входу:
![]()
Максимальная относительная нелинейность на Dx :
![]()
supreme - «наибольший из наибольших»
Синтез ПМ по МНК обеспечивает «наилучшее» приближение теоретической и номинальной ФП.
Проблема возникает при реализации регулировки приборного ПМ на реальном приборе (при калибровке, ремонте и т.п.). Реальный ПМ имеет еще много составляющих погрешности (технологических и эксплуатационных), которые носят случайный характер. Действительная погрешность ПМ ПМ(х) для партии приборов определяет зону технолической и эксплуатационной погрешности (См. схему)
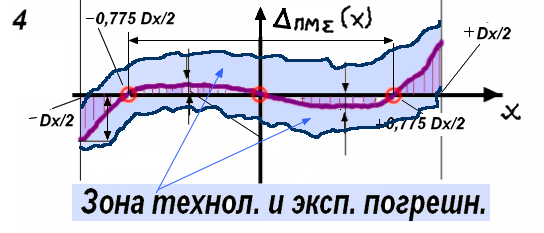
Точки регулировки (т.т. O) находятся внутри диапазона Dx и обеспечить «настройку в ноль» схемной (теоретической) погрешности на фоне других погрешностей очень сложно.
Поэтому на практике для регулировки выбирают точки регулировки, расположенные на краях и в середине диапазона. Схемная погрешность при этом больше, чем при МНК, но процедура настройки ПМ выполняется проще.
3.5.2. Регулировка по краям диапазона.

Оптимальное соотношение сх. парам. чувствительности, нелинейности и диапазона:
![]()
Выражение для CX(х) с учетом (*)
![]()
Экстремальные значения
CX мах= 0,048 ( /) Dx2
Точки регулировки (точки, в которых функция погрешности CX(х) принимает значение равное нулю) находятся на краях диапазона и в центре диапазона:
![]()
Среднеквадратическое значение погрешности схемы :
![]()
Максимальная относительная нелинейность:
![]()
3.6. Процедура регулировки на примере механизма рзг

1.
Задать перемещения входного звена,
соответствующие значениям точек
регулировки
![]()
2. Сравнить положения выходного звена (указателя) с отметками на шкале, соответствующим середине и краям диапазона Dx/2.
3. Определить несоответствия (погрешности регулировки ПМ) и определить источник погрешности и выполнить регулировку.
Пример. Для Dx = 0.1 мм(0,05) и регулировки по краям.
Для «эталонных» перемещений х применяем концевые меры длины (КМД) и блоки КМД с размерами х1=10, х2= 10,05, х3=10,1мм.

-
чувствительность Кд < К ном
-
чувствительность Кд > К ном
-
чувствительность Кд К ном, положение точек регулировки смещены в «плюс».

-
и т.п.
