

0.2. Кинематические пары
Кинематическая пара (КП) - подвижное соединение двух звеньев, допускающее их определенное относительное движение.
В местах соединения пары звеньев им придают определенные геометрические формы, чтобы обеспечить требуемый вид относительного движения.
Контактирующими элементами кинематической пары называют совокупность точек, линий и поверхностей, по которым звенья непрерывно касаются, и характер соприкосновения которых определяет вид относительного движения соединяемых звеньев.,
По виду контактирующих элементов различают высшие и низшие кинематические пары.
В низших КП - контактирующие элементы — поверхности.
В высших КП - контактирующие элементы — точка или линия, но не поверхности.
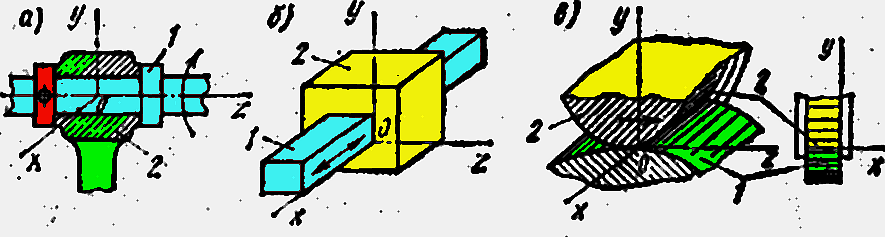
Примеры низших кп:
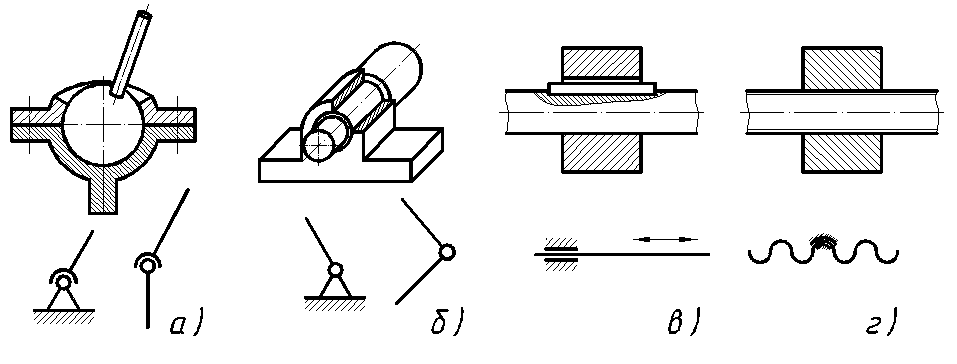
а) пространственный шарнир - сферический шарнир (контактирующие элементы (КЭ): сфера–сферическое гнездо);
б) плоский шарнир - цилиндрический шарнир (КЭ: – цилиндрические вал – втулка);
в) КП поступательного перемещения (КЭ: цилиндрические вал – втулка - направляющая шпонка);
г) Винтовая КП (КЭ: винт – гайка ).
( Контактирование во всех КП происходит по поверхностям !!!)
Примеры высших кп:
М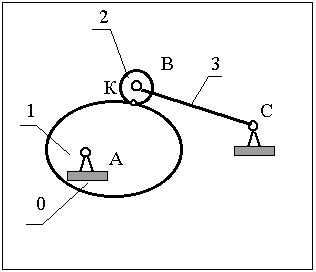 еханизм
кулачковый-
звенья 1 и 2 образуют высшую
КП.
(КЭ:
Выпуклая поверхность дискового кулачка
1 и цилиндрическая поверхность ролика
2. Контакт – линейчатый).
еханизм
кулачковый-
звенья 1 и 2 образуют высшую
КП.
(КЭ:
Выпуклая поверхность дискового кулачка
1 и цилиндрическая поверхность ролика
2. Контакт – линейчатый).
Звенья: 0) стойка, 1)кулачок, 2) ролик, 3) коромысло.
К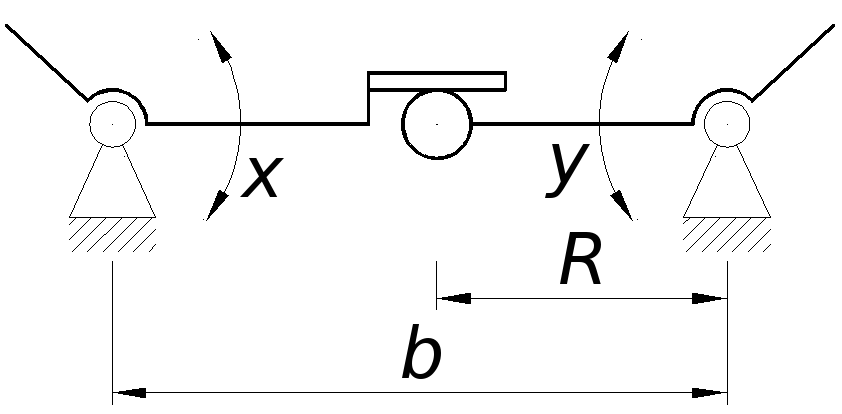 улисный
механизм
- высшая
КП
в точке контакта рычагов. КЭ:
плоскость - сфера. Контакт- точечный.
улисный
механизм
- высшая
КП
в точке контакта рычагов. КЭ:
плоскость - сфера. Контакт- точечный.
В этом механизме м/б применены для контактирующих элементов плоскость и цилиндр !!!
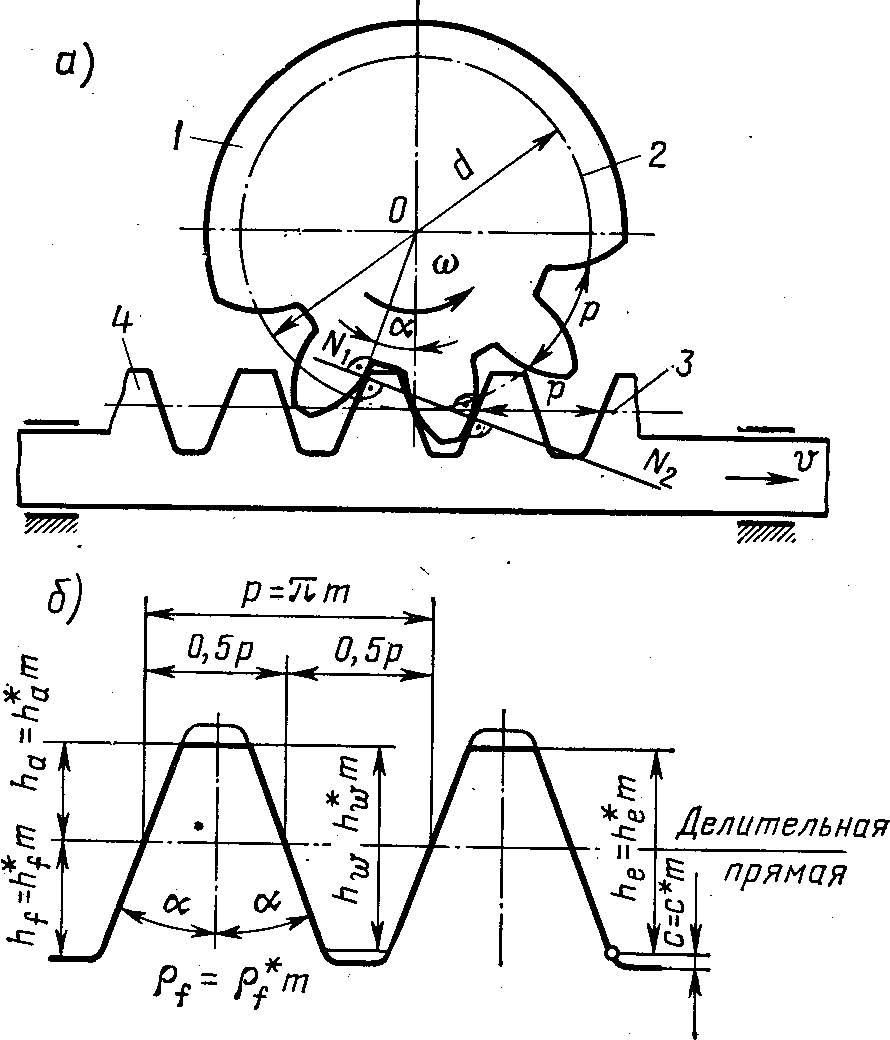
Зубчатый реечный механизм. Высшая КП в зацеплении зубчатых колеса (1) и рейки (4).
КЭ: Эвольвентная поверхность зуба колеса – плоскость на зубе рейки.
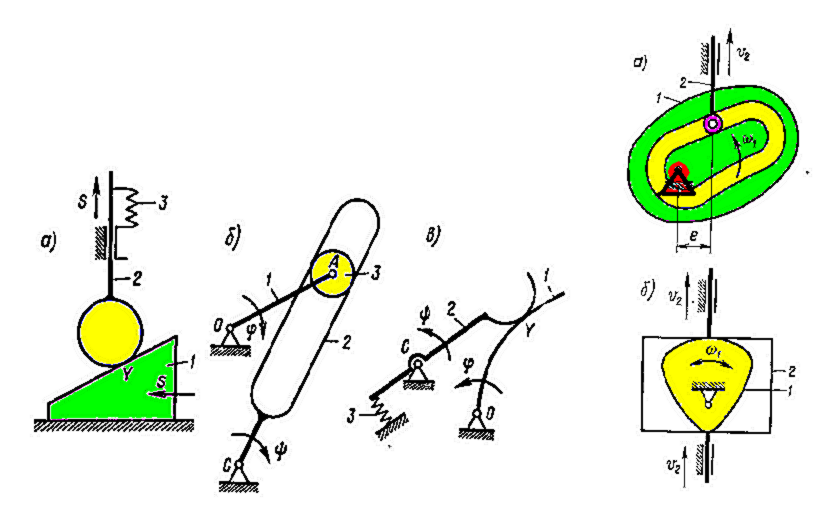
Виды замыкания в кп.
Во время движения механизма звенья в кинематических парах не должны разъединяться, т. е. пары должны быть замкнутыми.
Существует геометрическое и силовое замыкание пар. .
Геометрическое замыкание обеспечивается формой или конструкцией соприкасающихся звеньев (см. рис. 2а).
Для Силовое замыкания пар необходимо наличие дополнительно действующей на звенья внешней силы, которая создается силой упругости пружины, силой тяжести и т. п.
Высшие КП
Низшие КП
Обратимость КП
Низшие пары обладают свойством обратимости, т. е. вид траекторий точек звеньев при их относительном движении одинаков (траектории точек А и В одинаковые окружности см рис. а).
Высшие пары этим свойством не обладают даже при чистом качении. Так, траектория точки А цилиндра 1 (см. рис. б) при его качении по звену 2—циклоида, а при качении звена 2 по цилиндру 1 — эвольвента. Уравнения и свойства этих кривых различны.
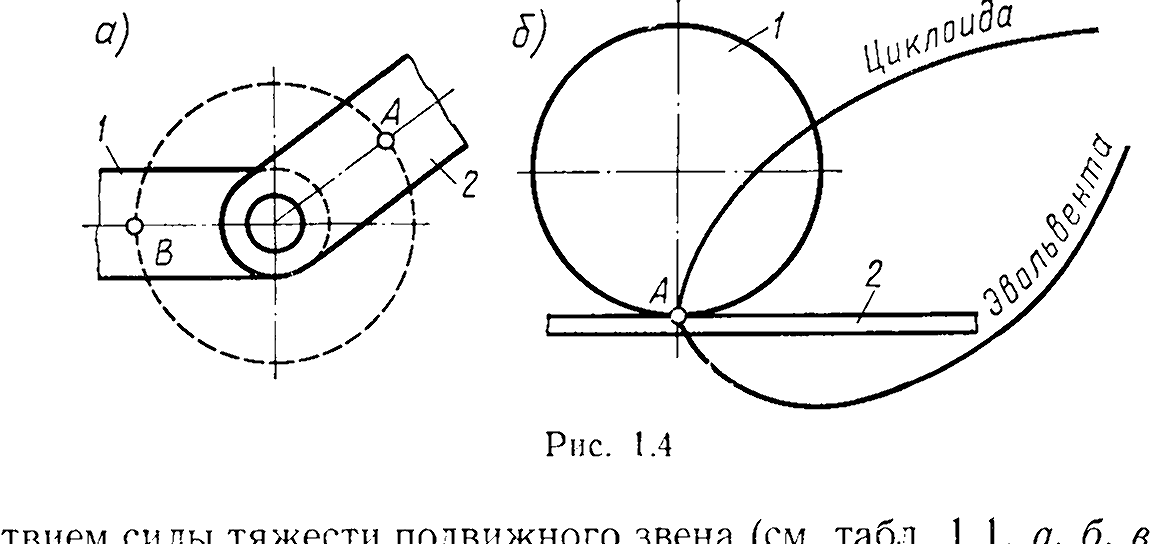
Сравним эти свойства для других примеров на схемах выше.
Свойства ВЫСШИХ И НИЗШИХ КП
при проектировании
-
свойства
Низшие КП
Высшие КП
Контакт
по поверхности
по линии и/или в точке
Трение
Чистое скольжение
качение, скольжение, качение + скольжение.
Нагрузочная способность
Высокая
Низкая
(к =F/Sконт.)
Сложность изготовления КЭ.
Высокая
точность размеров, формы, шероховатость
Невысокая – КЭ элементарные тела и поверхности (Плоскость,Сфера, Цилиндр - м/б точно обработаны)
Обратимость
КП
Обратимы
Необратимы.
Вид замыкания
Геометрический,
редко силовой
Силовой
Область применения
Машины, механизмы нагруженные
Маломощные механизмы, приборы.
Различают кинематический, и машиностроительный методы проектирования кинематических пар.
При машиностроительном методе пары — низшие, при кинематическом— высшие.
К достоинствам кинематического метода проектирования следует отнести: а) точность фиксации; б) статическую определимость кинематических пар (число неизвестных составляющих реакций равно числу уравнений равновесия). При статической определимости направляющих движения, спроектированных по кинематическому методу, уменьшается неплавность перемещений при малой скорости движения.
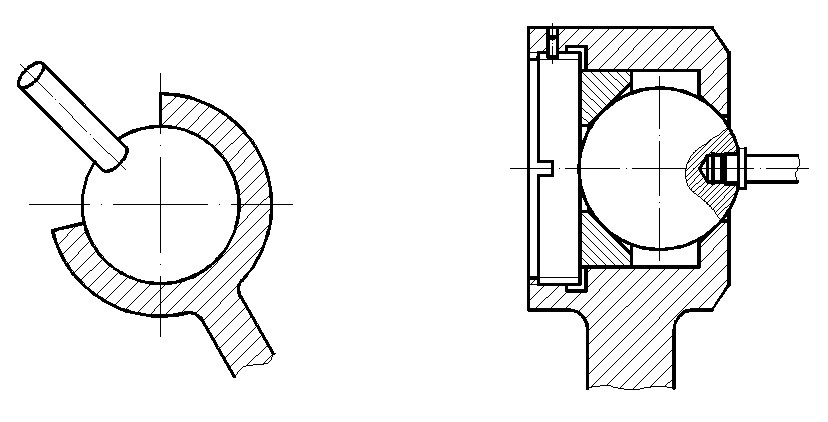



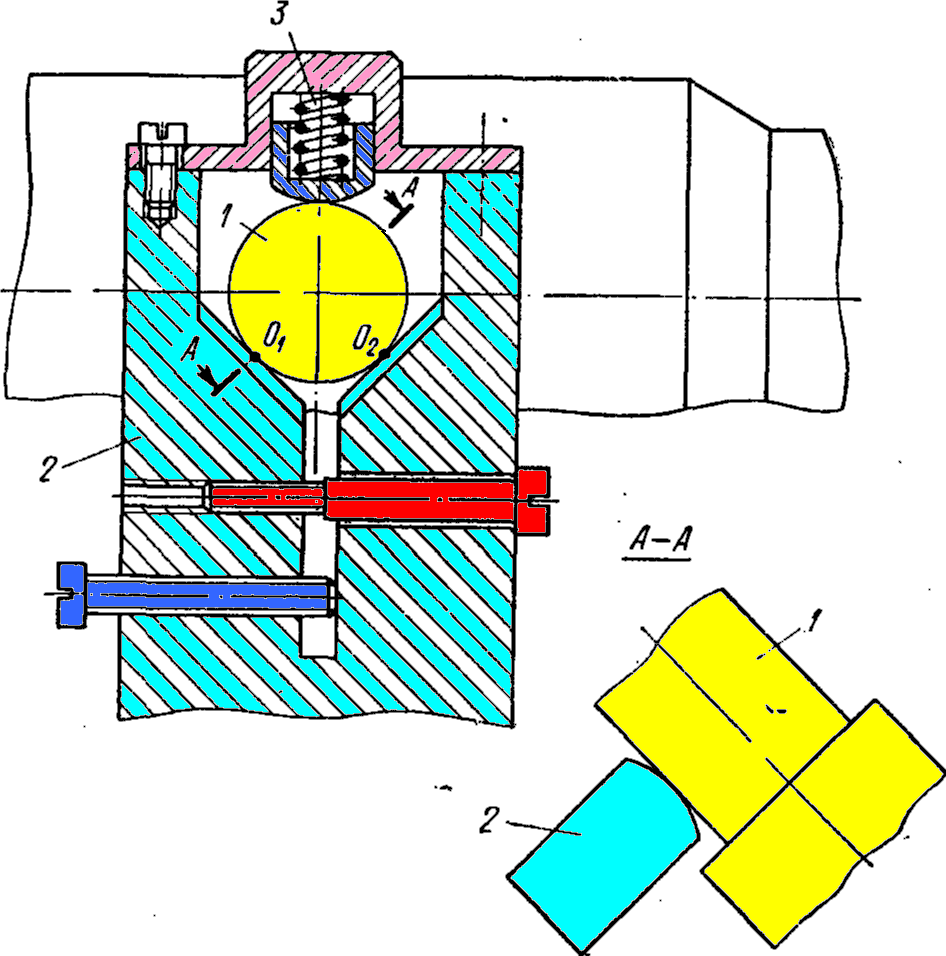
Сферические шарниры, построенные по принципам низшей (а) и высшей (б) КП.
а) КЭ: сфера–сферическое гнездо;
б) КЭ: сфера- две шайбы с коническими отверстиями. Контакт – линейчатый.)