

1.1.2 Призначення, загальна характеристика і склад системи
Основне призначення СРНС ГЛОНАСС – глобальна оперативна навігація приземних приземних рухомих об'єктів: наземних (сухопутних, морських, повітряних) і низькоорбітальних космічних. Термін “ глобальна оперативна навігація ” означає що рухливий об’єкт, оснащений навігаційною апаратурою споживача (НАС) , може в будь-якому місці простору в будь-який момент часу визначити (уточнити) параметри свого руху – три координати і три складові вектора швидкості.
Система була розроблена на замовлення і знаходиться під керівництвом Міністерства Оборони Російської Федерації. Розпорядженням Президента РФ від 18 лютого 1999 року ГЛОНАСС надано статус системи подвійного (військового і цивільного) призначення.
Інформування користувачів про стан системи здійснюється через Координаційній науково-інформаційний центр Міністерства Оборони Російської Федерації, а також Інформаційно - аналітичний центр координатно-часового забезпечення Центра управління польотами Російського авіаційно-космічного агентства .
В ГЛОНАСС використовуються навігаційні космічні апарати (НКА) на кругових геоцентричних орбітах з висотою приблизно 20000 км над поверхнею землі. Завдяки використанню в бортових эталонах часу і частоти НКА атомних стандартів частоти в системі забезпечується взаємна синхронізація навігаційних радіосигналів, випромінюваних орбітальним угрупованням НКА. У навігаційній апаратурі на рухомому об’єкті в сеансі навігації приймаються радіосигнали не менше ніж від чотирьох супутників і використовуються для вимірювання не менше ніж 4 псевдо відстаней і радіальних швидкостей. Результати вимірювань і ефемеридна інформація, прийнята від кожного НКА, дозволяють визначити (уточнити) три координати і три складові швидкості рухомого об’єкта і визначити зміщення шкали часу (ШЧ) об’єкта відносно ШЧ системи. В СРНС число користувачів не обмежується, оскільки НАК не передає радіосигнали на НКА, а тільки приймає їх від НКА (пасивна навігація).
Радіонавігаційне поле СРНС ГЛОНАСС крім ще своєї основної функції (глобальна оперативна навігація рухомих об’єктів) виконує наступне:
-
Локальна високоточна навігація наземних рухомих об’єктів на основі диференціальних методів навігації з використанням стаціонарних корегувальних станцій та НКА
-
Високоточна взаємна геодезична прив’язка віддалених наземних об’єктів
-
Взаємна синхронізація стандартів частоти і часу на віддалених наземних об’єктах.
-
Не оперативна автономна навігація низько - и середньорбітальних космічних об’єктів.
СРНС ГЛОНАСС включає у собі три сегмента:
-
космічний сегмент з орбітальним угрупуванням НКА;
-
сегмент управління – наземний комплекс управління (НКУ);
-
сегмент НАК – апаратура користувачів;
Рис 1.1 Підсистема космічних апаратів ГЛОНАСС

Рис 1.2 супутник ГЛОНАСС-М
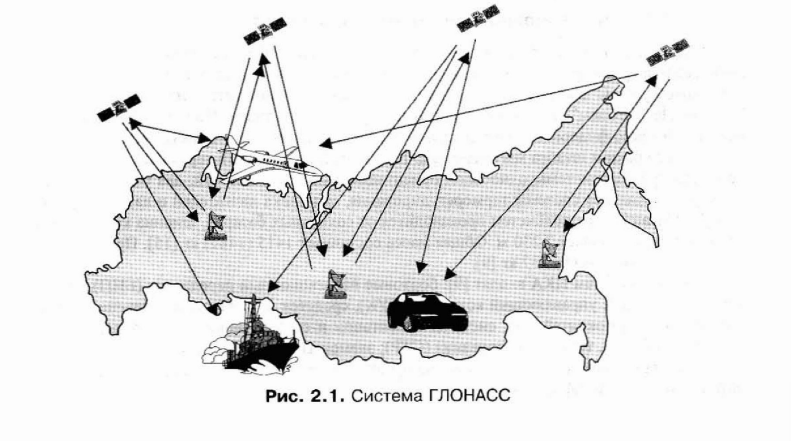
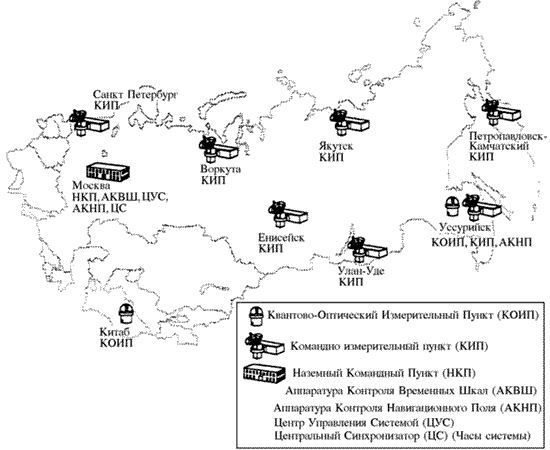
Рис 2.2 Сегмент наземного комплексу управління системи ГЛОНАСС
1.2. Космічний сегмент
1.2.1 Орбітальне угруповання
Повне орбітальне угруповання в ГЛОНАСС вміщає в собі 24 штатних НКА на кругових орбітах в 3 орбітальних площинах по 8 НКА на кожній. Номінальний період обертання НКА дорівнює 11 годин 15 хвилин 44 секунд і відповідно номінальна висота кругової орбіти становить 19100 км над поверхнею Землі. В кожній орбітальній площині 8 НКА рознесені по аргументу ширини через 45 градусів і аргументи ширини 8 НКА в трьох орбітальних площинах зрушені на 15 градусів.
2.3.2 Навігаційний космічний апарат
Загальний вигляд НКА представлений на Рис 1.2. Супутник ГЛОНАСС конструктивно складається з циліндричного гермо контейнера з приладовим блоком, рами антенно-фідерних пристроїв, приладів системи орієнтації, панелей сонячних батарей із приводами, блоку рухової установки і жалюзі системи терморегулювання з приводами. На супутнику також встановлені оптичні кутові відбивачі, призначені для калібрування радіосигналів вимірювальної системи за допомогою вимірів дальності до супутника в оптичному діапазоні, а також для уточнення геодинамічних параметрів моделі руху супутника. Конструктивно кутові відбивачі формуються у вигляді блоку, що постійно відслідковує напрямок на центр Землі.
До складу бортової апаратури входять:
-
навігаційний комплекс;
-
комплекс керування; система орієнтації і стабілізації;
-
система корекції; система терморегулювання;
-
система електропостачання.
Навігаційний комплекс забезпечує функціонування супутника як елемента системи ГЛОНАСС.
До складу навігаційного комплексу входять:
-
синхронізатор;
-
формувач навігаційних радіосигналів;
-
бортовий комп'ютер;
-
приймач навігаційної інформації і передавач навігаційних радіосигналів.
Синхронізатор забезпечує видачу високо стабільних синхрочастот на бортову апаратуру, формування, збереження, корекцію і видачу бортової шкали часу.
Формувач навігаційних радіосигналів забезпечує формування псевдовипадкових фазоманіпуляційних навігаційних радіосигналів, що містять далекомірний код і навігаційне повідомлення.
Комплекс керування забезпечує керування системами супутника і контролює правильність їхнього функціонування. До складу комплексу входять: командно-вимірювальна система, блок керування бортовою апаратурою і система телеметричного контролю.
Командно-вимірювальна система забезпечує вимір дальності в запитальному режимі, контроль бортової шкали часу, керування системою по разових командах і тимчасових програмах, запис навігаційної інформації в бортовий навігаційний комплекс і передачу телеметрії.
Блок керування забезпечує розподіл живлення на системи і прилади супутника, логічну обробку, розмноження і посилення разових команд.
Система орієнтації і стабілізації забезпечує заспокоєння супутника після відділення від ракети-носія, початкову орієнтацію сонячних батарей на Сонце і повздовжньої осі супутника на Землю, потім орієнтацію повздовжньої осі супутника на центр Землі і націлювання сонячних батарей на Сонце, а також стабілізацію супутника в процесі корекції орбіти. У системі використовуються прилад на основі інфрачервоної побудови місцевої вертикалі (для орієнтації на центр Землі) і прилад для орієнтації на Сонце. Погрішність орієнтації на центр Землі не гірше 3град., а відхилення нормалі до поверхні сонячної батареї від напрямку на Сонце - не більш 5град. Як виконавчий орган при здійсненні заспокоєння і стабілізації супутника під час видачі імпульсу корекції використовується рухова установка.
Режим заспокоєння, у результаті якого відбувається гасіння кутових швидкостей, включається в зоні радіовидимості.
У режимі початкової орієнтації на Сонці здійснюється розворот супутника щодо подовжньої осі за допомогою керуючих двигунів-маховиків до появи Сонця в полі зору приладу орієнтації на Сонце, що встановлена на панелі сонячних батарей.
Режим орієнтації на Землю починається з положення орієнтації на Сонце шляхом розвороту супутника за допомогою двигунів-маховиків уздовж осі, орієнтованої на Сонце, до появи Землі в полі зору приладу орієнтації на центр Землі. У штатному режимі забезпечується орієнтація осі супутника разом з антенами на центр Землі за допомогою керуючих двигунів-маховиків по сигналах із приладів орієнтації на центр Землі, орієнтація сонячних батарей на Сонце шляхом розвороту супутника разом сонячними батареями за допомогою керуючого двигуна-маховика по одному каналі і розворотів панелей батарей щодо корпуса супутника за допомогою приводу обертання сонячних батарей по іншому каналі по сигналах приладів орієнтації на Сонце.
У режимі орієнтації перед проведенням корекції і стабілізації супутника під час видачі імпульсу корекції відстеження орієнтації на Сонці не виробляється.
Система корекції забезпечує приведення супутника в задане положення в площині орбіти і його утримання в даних межах по аргументі широти. Система включає рухову установку і блок керування. Рухова установка складається з 24 двигунів орієнтації з тягою 10 г і двох двигунів корекції з тягою 500 г. Система терморегулювання забезпечує необхідний тепловий режим супутника. Регулювання тепла, що відводиться з гермо контейнера, здійснюють жалюзі, що відкривають або закривають радіаційну поверхню в залежності від температури газу. Відвід тепла від приладів здійснюється циркулюючим газом за допомогою вентилятора. Система електропостачання включає сонячні батареї, акумуляторні батареї, блок автоматики і стабілізації напруги. При проходженні супутником тіньових ділянок Землі і Місяця живлення бортових систем здійснюється за рахунок акумуляторних батарей. Їхня розрядна ємність складає 70 ампер-годин. Для забезпечення надійності на супутнику встановлюються по два або по три комплекти основних бортових систем.
Таким чином, на супутник ГЛОНАСС покладене виконання наступних функцій:
-
випромінювання високо стабільних радіонавігаційних сигналів;
-
прийом, збереження і передача цифрової навігаційної інформації;
-
формування, оцифровка і передача сигналів точного часу;
-
ретрансляція або випромінювання сигналів для проведення траєкторних вимірів для контролю орбіти і визначення виправлень до бортової шкали часу;
-
прийом і обробка разових команд;
-
прийом, запам'ятовування і виконання тимчасових програм керування режимами функціонування супутника на орбіті;
-
формування телеметричної інформації про стан бортової апаратури і передача її для обробки й аналізу наземному комплексові керування;
-
прийом і виконання кодів/команд корекції і фазування бортової шкали часу;
-
формування і передача "ознаки несправності" при виході важливих контрольованих параметрів за межі норми.