

1.Основні гіпотези і співвідношення теорії пружності
Основними
поняттями теорії пружності є напруження,
що діють на малих площинках, котрі можна
уявно провести в тілі через задану
точку P,
деформації малої околиці точки P
і переміщення самої точки P.
Точніше кажучи, вводяться тензор
механічних напружень ,
тензор малих деформацій
,
тензор малих деформацій
 і вектор переміщення ui.
Коротке
позначення
і вектор переміщення ui.
Коротке
позначення
 ,
де індекси i,
j набувають
значень 1, 2, 3 (або x,y,z)
слід розуміти як матрицю у видах:
,
де індекси i,
j набувають
значень 1, 2, 3 (або x,y,z)
слід розуміти як матрицю у видах:
 =
=
1.Гіпотеза суцільності. Відповідно до цієї гіпотези тверде тіло має
безперервну структуру й ця властивість безперервності відноситься до
будь-якого як завгодно малого об’єму тіла. Таке допущення дозволяє
стверджувати, що напруги, деформації й переміщення є безперервними
функціями координат точок тіла, і для дослідження
напряжено-деформованого стану тіла можна використовувати аналіз
нескінченно малих.
2.Гіпотеза про фізичну однорідність. Відповідно до цієї гіпотези всі
фізичні характеристики тіла (модулі пружності, коефіцієнти Пуассона,
щільності й ін.) не залежать від координат точок тіла.
3.Гіпотеза про природний ненапружений стан. Суть цього твердження
полягає в тому, що при відсутності зовнішніх навантажень напруги у всіх
точках тіла приймаються рівними нулю. Практично ж у тілі можуть бути
початкові напруги, іноді досить значні (наприклад, залишкові зварювальні
напруги).
4.Гіпотеза про ідеальну пружність. Це означає, що форма й розміри тіла
повністю відновлюються після усунення причин, що викликали деформації, а
між деформаціями й напругами існує лінійна залежність, тобто
справедливий закон Гука.
2. Основні рівняння теорії пружності. Розвязання задачі теорії пружності в переміщеннях (рівняння Ляме).
У попередньому розділі отримані три групи формул, які утворять основні рівняння теорії пружності.
1. Статичні рівняння. У цю групу входять диференціальні рівняння рівноваги:
|
|
(2.1) |

і умови на поверхні:
|
|
(2.2) |
2. Геометричні рівняння. У цю групу входять геометричні співвідношення Коші:
|
|
(2.3) |
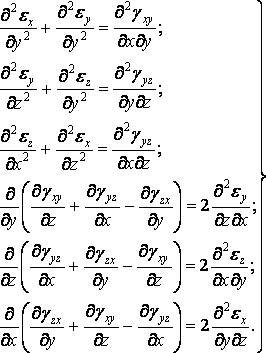
і рівняння нерозривності деформацій:
|
|
(2.4) |
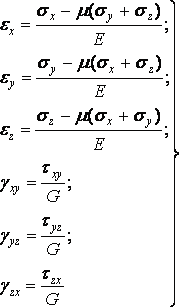
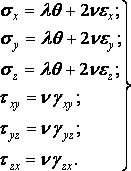
3. Фізичні рівняння. У цю групу входять формули закону Гука або в прямій формі:
|
|
(2.5) |
або у зворотній формі:
|
|
(2.6) |
Маючи ці залежності, можна приступити безпосередньо до розв’язання задач теорії пружності про напруги й деформації, що виникають у пружному ізотропному тілі під дією зовнішніх сил.
Рівняння (2.1)-(2.6) містять 15 невідомих функцій:
шість складових напруг
![]()
шість складових деформацій
![]()
три складові переміщення
![]()
Для визначення цих функцій розташовуємо 15 рівняннями: трьома диференціальними рівняннями рівноваги (2.1), шістьма геометричними співвідношеннями Коші (2.3) і шістьма формулами закону Гука (2.5) або (2.6). Таким чином, з математичної точки зору задача може бути вирішена й зводиться до інтегрування зазначених 15 рівнянь при задоволенні умов на поверхні (2.2).
Розв’язання рівнянь можна вести різними способами залежно від того, які величини прийняті за основні невідомі.
1. Розв’язання
в переміщеннях, коли за
невідомі прийняті три складові переміщення ![]()
2. Розв’язання
в напругах, коли
за невідомі прийняті шість складових
напруг ![]()
![]()
3. Розв’язання в змішаній формі, коли за невідомі прийняті деякі складові переміщень і деякі складові напруг.