

5.3. Частотные критерии устойчивости
1. Критерий Михайлова
В основу критерия
Михайлова, сформулированного им в 1938
г., положен известный в теории функций
комплексного переменного принцип
аргумента. Согласно этому принципу
приращение аргумента функции
![]() комплексного переменного
комплексного переменного
![]() при изменении его по замкнутому контуру
в положительном направлении (против
часовой стрелки) составляет
при изменении его по замкнутому контуру
в положительном направлении (против
часовой стрелки) составляет
![]() ,
где
,
где
![]() – число нулей, а
– число нулей, а
![]() – число полюсов функции
– число полюсов функции
![]() внутри замкнутого контура. Предполагается,
что функция
внутри замкнутого контура. Предполагается,
что функция
![]() аналитична внутри этого контура и не
имеет нулей и полюсов на контуре.
аналитична внутри этого контура и не
имеет нулей и полюсов на контуре.
Если применить
принцип аргумента к полиному
![]() ,
стоящему в левой части характеристического
уравнения
,
стоящему в левой части характеристического
уравнения
![]() , (5.14)
, (5.14)
используя в
качестве контура мнимую ось
![]() ,
замкнутую полуокружностью бесконечного
радиуса, то можно получить критерий
Михайлова.
,
замкнутую полуокружностью бесконечного
радиуса, то можно получить критерий
Михайлова.
Однако предпочтем
другое доказательство критерия
Михайлова, которое является простым и
поучительным. В соответствии с
характеристическим уравнением полином
![]() можно представить в виде
можно представить в виде
![]() , (5.15)
, (5.15)
где
![]() – корни уравнения (1.1).
– корни уравнения (1.1).
Положим
![]() ,
тогда
,
тогда
![]()
Рассмотрим
геометрическое представление комплексных
чисел
![]() на комплексной плоскости
на комплексной плоскости
![]() .
Начала векторов, изображающих комплексные
числа, лежат в точках
.
Начала векторов, изображающих комплексные
числа, лежат в точках
![]() ,
а концы – на мнимой оси в точке
,
а концы – на мнимой оси в точке
![]() (рис. 5.3).
(рис. 5.3).
Найдем аргумент
комплексного числа
![]() :
:
![]() . (5.16)
. (5.16)
Изменение аргумента
![]() с изменением
с изменением
![]() равно
равно
![]() (5.17)
(5.17)
Согласно (5.17) для
определения изменения аргумента
необходимо подсчитать сумму изменений
аргументов сомножителей
![]() .
Изменения аргументов зависят от того,
в какой (правой или левой) полуплоскости
лежат корни
.
Изменения аргументов зависят от того,
в какой (правой или левой) полуплоскости
лежат корни
![]() .
Рассмотрим два случая. Пусть корни
.
Рассмотрим два случая. Пусть корни
![]() лежат в левой полуплоскости (рис. 5.3,
а).
При изменении
лежат в левой полуплоскости (рис. 5.3,
а).
При изменении
![]() конец вектора
конец вектора
![]() скользит
вдоль мнимой оси снизу вверх, поворачиваясь
против часовой стрелки на 180º, при этом
приращение аргумента
скользит
вдоль мнимой оси снизу вверх, поворачиваясь
против часовой стрелки на 180º, при этом
приращение аргумента
![]()
Если корень
![]() лежит в правой полуплоскости (рис. 5.3,
б),
то рассуждая аналогично, получим
лежит в правой полуплоскости (рис. 5.3,
б),
то рассуждая аналогично, получим
![]()
Допустим, что
уравнение
![]() имеет
имеет
![]() корней в правой полуплоскости и
корней в правой полуплоскости и
![]() корней в левой полуплоскости (порядок
уравнения равен
корней в левой полуплоскости (порядок
уравнения равен
![]() ),
тогда приращение аргумента при
),
тогда приращение аргумента при
![]()
![]() (5.18)
(5.18)
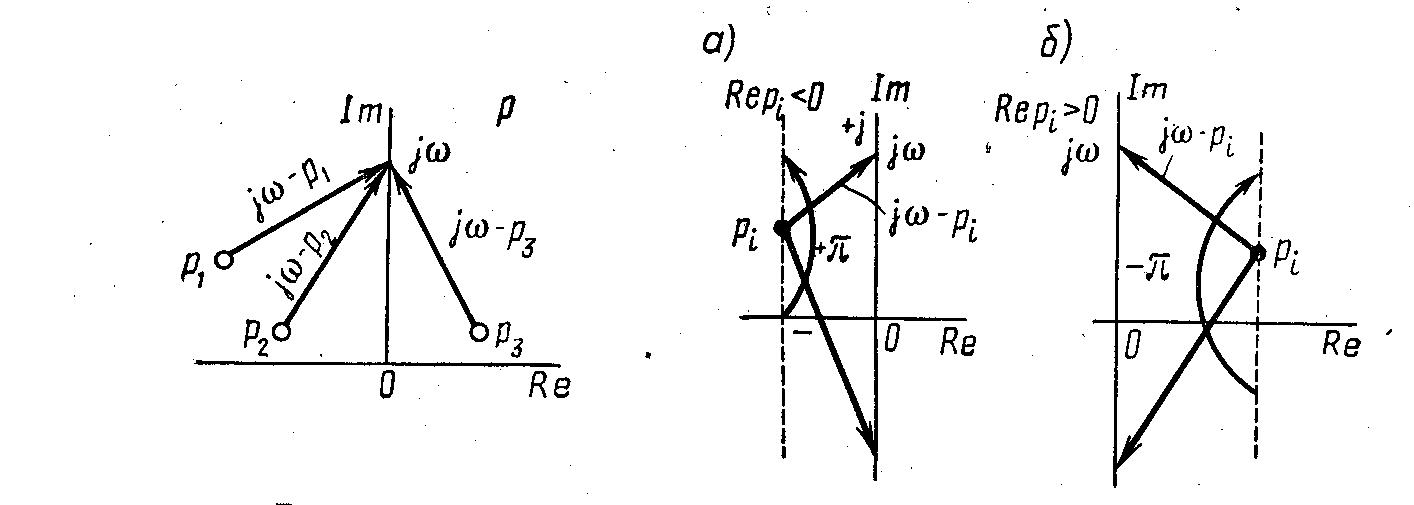
Рис. 5.3. Геометрическое представление комплексных чисел
Выражение (5.18)
представляет собой запись принципа
аргумента для характеристического
полинома
![]() .
.
Для устойчивости
системы автоматического регулирования,
имеющей характеристическое уравнение
![]() ,
необходимо и достаточно, чтобы число
правых корней
,
необходимо и достаточно, чтобы число
правых корней
![]() было равно нулю; приращение аргумента
при
было равно нулю; приращение аргумента
при
![]() :
:
![]() (5.19)
(5.19)
Заметим, что при
![]() аргумент
аргумент
![]() будет монотонно возрастать с увеличением
будет монотонно возрастать с увеличением
![]() .
.
Критерий устойчивости
Михайлова является наглядной графической
интерпретацией соотношения (5.19). Построим
годограф характеристического вектора
![]() ,
называемый годографом Михайлова. При
этом можно ограничиться половинным
диапазоном изменения
,
называемый годографом Михайлова. При
этом можно ограничиться половинным
диапазоном изменения
![]()
![]() ,
так как для полиномиальной функции от
,
так как для полиномиальной функции от
![]() справедливы равенства
справедливы равенства
![]()
и часть годографа
![]() ,
соответствующая отрицательным значениям
,
соответствующая отрицательным значениям
![]() ,
представляет собой зеркальное отражение
относительно действительной оси части
годографа
,
представляет собой зеркальное отражение
относительно действительной оси части
годографа
![]() для положительных
для положительных
![]() .
При изменении
.
При изменении
![]() в половинном диапазоне
в половинном диапазоне
![]()
![]() (5.20)
(5.20)
Согласно критерию
Михайлова для устойчивости системы
автоматического регулирования необходимо
и достаточно, чтобы годограф
характеристического вектора
![]() ,
начинаясь при
,
начинаясь при
![]() на действительной оси, с ростом
на действительной оси, с ростом
![]() от 0 до
от 0 до
![]() обходил последовательно в положительном
направлении (против часовой стрелки)
обходил последовательно в положительном
направлении (против часовой стрелки)
![]() квадрантов, где
квадрантов, где
![]() – порядок характеристического уравнения.
– порядок характеристического уравнения.
На рис. 5.4, а
показаны годографы Михайлова для
устойчивых систем при различных
значениях
![]() .
Все они начинаются при
.
Все они начинаются при
![]() со значения
со значения
![]() на положительной действительной
полуоси. Это означает, что характеристические
уравнения приведены к виду, при котором
их коэффициенты положительны. Годографы,
изображенные на рис. 5.4, а
уходят в бесконечность при
на положительной действительной
полуоси. Это означает, что характеристические
уравнения приведены к виду, при котором
их коэффициенты положительны. Годографы,
изображенные на рис. 5.4, а
уходят в бесконечность при
![]() и обходят соответствующее число
квадрантов в положительном направлении.
и обходят соответствующее число
квадрантов в положительном направлении.
На рис. 5.4, б
показаны годографы неустойчивых систем.
Все они не удовлетворяют условию обхода
![]() квадрантов в положительном направлении.
квадрантов в положительном направлении.
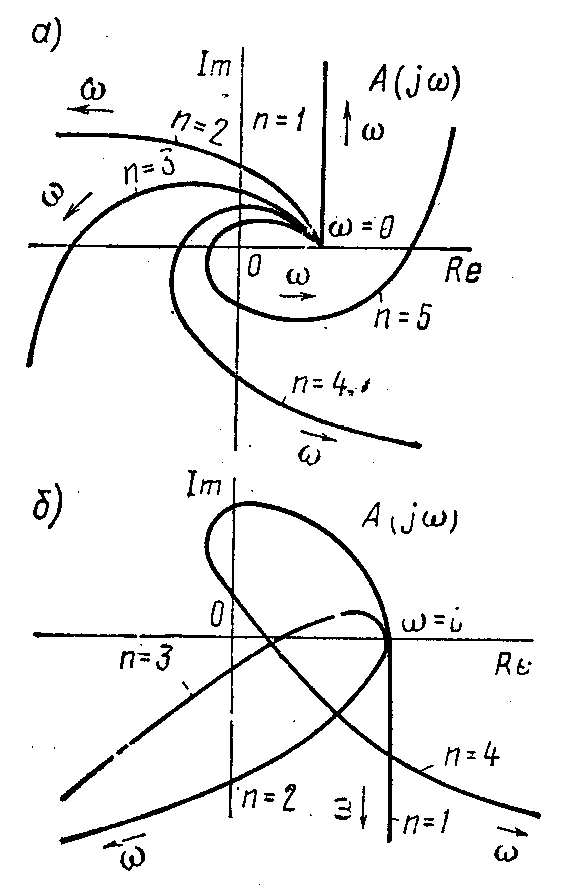
Рис. 5.4. Годографы Михайлова для устойчивых и неустойчивых систем