

5. Устойчивость линейных систем автоматического регулирования
5.1. Постановка задачи исследования устойчивости
Понятие устойчивости, сформулированное для объектов управления и для отдельных звеньев, распространяется и на системы автоматического регулирования в целом. Устойчивость представляет способность системы автоматического регулирования возвращаться к исходному состоянию после кратковременного внешнего воздействия. Системы автоматического регулирования, как правило, должны быть устойчивыми.
Так же, как и в случае линейных звеньев, необходимым и достаточным условием устойчивости линейной системы автоматического регулирования является отрицательность вещественных частей всех корней ее характеристического уравнения. Вышесказанное может быть получено из передаточной функции замкнутой системы, связывающей любые ее вход и выход, путем приравнивания нулю знаменателя передаточной функции
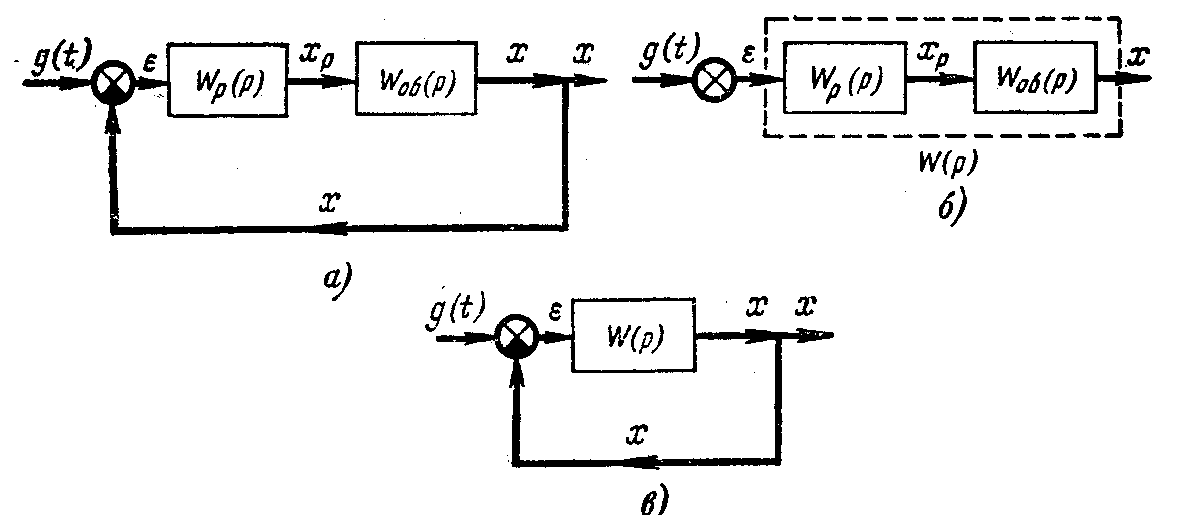
Рис. 5.1. Структурные схемы автоматического регулирования:
а, в – замкнутые системы; б – разомкнутая система
На рис. 5.1 показана структурная схема, к которой может быть приведена любая односвязная линейная схема автоматического регулирования при отсутствии всех внешних воздействий кроме задающего. Если передаточная функция разомкнутой системы
![]() (5.1)
(5.1)
где K(p)
и D(p)
– полиномы степеней соответственно
m
и n
![]() ,
то передаточная функция замкнутой
системы
,
то передаточная функция замкнутой
системы
![]() , (5.2)
, (5.2)
откуда путем
приравнивания знаменателя
![]() нулю получается характеристическое
уравнение замкнутой системы
нулю получается характеристическое
уравнение замкнутой системы
![]() степени:
степени:
![]() (5.3)
(5.3)
Обозначая
![]() (5.4)
(5.4)
можно записать характеристическое уравнение в виде
![]() (5.5)
(5.5)
5.2. Оценка устойчивости разомкнутой и замкнутой системы с помощью алгебраического критерия Рауса-Гурвица
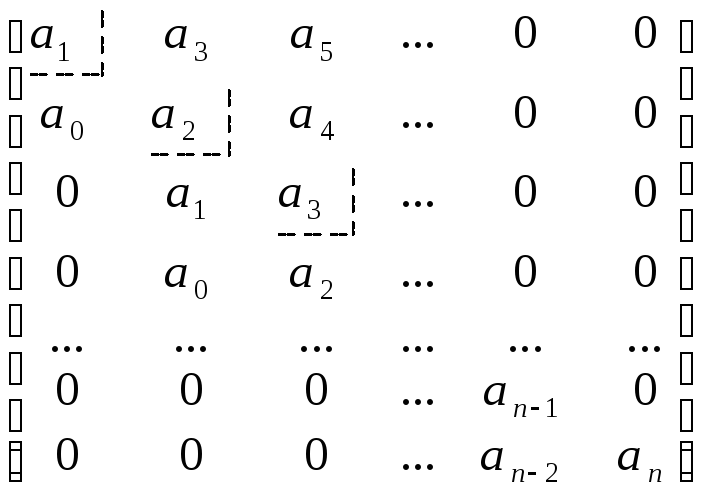
Для характеристического
уравнения (5.5) составим квадратную
матрицу (таблицу коэффициентов),
содержащую
![]() строк и
строк и
![]() столбцов:
столбцов:
 (5.6)
(5.6)
Эта таблица составляется следующим образом.
По диагонали от
левого верхнего до правого нижнего
углов выписываются все коэффициенты
по порядку от
![]() до
до
![]() .
Каждая строка дополняется коэффициентами
с нарастающими индексами слева направо
так, чтобы чередовались строки с
нечетными и четными индексами. В случае
отсутствия данного коэффициента, а
также, если индекс его меньше нуля или
больше
.
Каждая строка дополняется коэффициентами
с нарастающими индексами слева направо
так, чтобы чередовались строки с
нечетными и четными индексами. В случае
отсутствия данного коэффициента, а
также, если индекс его меньше нуля или
больше
![]() ,
на место его пишется нуль.
,
на место его пишется нуль.
Критерий устойчивости
сводится к тому, что при
![]() должны быть больше нуля все
должны быть больше нуля все
![]() определителей Гурвица, получаемых из
квадратной матрицы коэффициентов.
определителей Гурвица, получаемых из
квадратной матрицы коэффициентов.
Определители Гурвица составляются по следующему правилу (см. (5.6):
![]() ; (5.7)
; (5.7)
![]() ; (5.8)
; (5.8)
 ; (5.9)
; (5.9)
Последний определитель включает в себя всю матрицу. Но так как в последнем столбце матрицы все элементы, кроме нижнего, равны нулю, то определитель Гурвица выражается через последний член следующим образом:
![]() . (5.10)
. (5.10)
Однако в устойчивой
системе предпоследний определитель
тоже должен быть положительным. Поэтому
условие положительности последнего
определителя сводится к условию
![]() ,
т.е. к положительности свободного члена
характеристического уравнения.
,
т.е. к положительности свободного члена
характеристического уравнения.
Условие нахождения
системы на границе устойчивости можно
получить, приравнивая нулю последний
определитель:
![]() ,
при положительности всех остальных
определителей. Как следует из (5.10) это
условие распадается на два условия:
,
при положительности всех остальных
определителей. Как следует из (5.10) это
условие распадается на два условия:
![]() и
и
![]() .
Первое условие соответствует границе
устойчивости первого типа (апериодическая
граница устойчивости) и второе - границе
устойчивости второго типа (колебательная
граница устойчивости).
.
Первое условие соответствует границе
устойчивости первого типа (апериодическая
граница устойчивости) и второе - границе
устойчивости второго типа (колебательная
граница устойчивости).
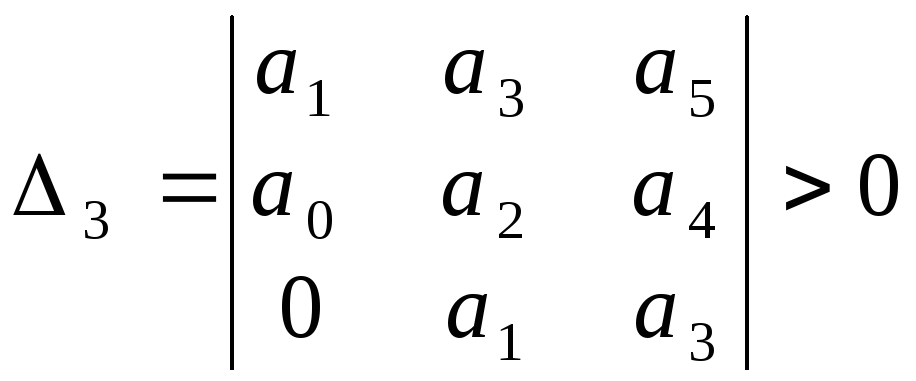
Для примера: Уравнение третьего порядка
![]() .
.
Для этого уравнения получаем условия
![]() ;
;
![]() ;
;
![]() .
.
Третий (последний)
определитель
![]() дает условие
дает условие
![]() .
Условие
.
Условие
![]() при
при
![]() ,
,
![]() и
и
![]() может выполняться только при
может выполняться только при
![]() .
.
Следовательно,
для уравнения третьего порядка уже
недостаточно положительности всех
коэффициентов характеристического
уравнения. Требуется еще выполнение
определенного соотношения между
коэффициентами:
![]() .
.
Уже для уравнений пятой степени условия устойчивости по критерию Гурвица получаются достаточно громоздкими. Существенным недостатком является также то, что для уравнений высоких порядков в лучшем случае можно получить ответ о том, устойчива или неустойчива система автоматического управления. При этом в случае неустойчивости системы критерий не дает ответа на то, каким образом надо изменить параметры системы, чтобы сделать ее устойчивой. Это обстоятельство привело к поискам других критериев, которые были бы более удобными в инженерной практике.
Для иллюстрации применения критерия Гурвица рассмотрим пример на определение устойчивости дистанционной следящей системы. Принципиальная и структурная схемы изображены на рис. 5.2.
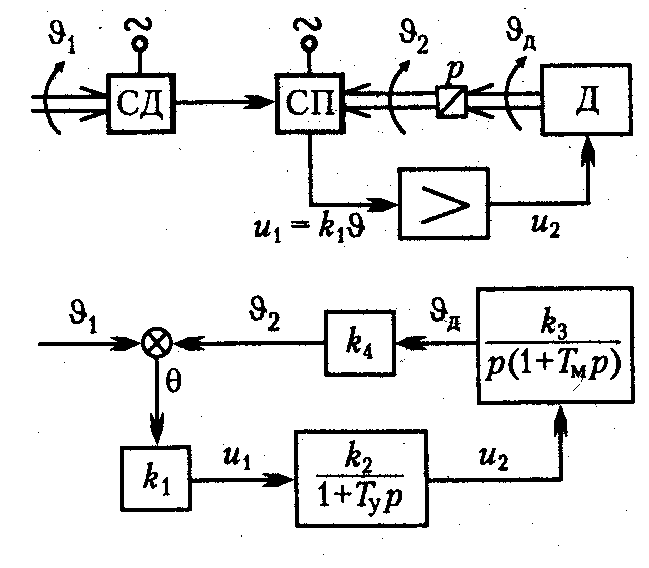
Рис. 5.2. Функциональная и структурная схемы следящей системы
В качестве чувствительного элемента использованы два сельсина (СД и СП), включенные по трансформаторной схеме. Передаточная функция сельсинов равна коэффициенту передачи схемы:
![]() ,
,
где
![]() – ошибка, равная разности углов поворота
командной и исполнительной осей.
– ошибка, равная разности углов поворота
командной и исполнительной осей.
Передаточная функция усилителя:
![]() ,
,
где
![]() – коэффициент усиления и
– коэффициент усиления и
![]() – постоянная времени усилителя.
– постоянная времени усилителя.
Передаточная функция двигателя (Д):
![]() ,
,
где
![]()
![]() – коэффициент передачи двигателя по
скорости, а
– коэффициент передачи двигателя по
скорости, а
![]() – электромеханическая постоянная
времени двигателя совместно с оконечным
каскадом усилителя.
– электромеханическая постоянная
времени двигателя совместно с оконечным
каскадом усилителя.
Передаточная функция редуктора (Р) равна его коэффициенту передачи, определяемому передаточным отношением:
![]() .
.
Так как цепь управления состоит из включенных последовательно звеньев, то передаточная функция разомкнутой цепи будет равна произведению передаточных функций отдельных звеньев:
![]() , (5.11)
, (5.11)
где
![]()
![]() – общий коэффициент усиления разомкнутой
цепи.
– общий коэффициент усиления разомкнутой
цепи.
Характеристическое уравнение замкнутой цепи:
![]() .
.
После подстановки
![]() получаем
получаем
![]() . (5.12)
. (5.12)
В данном случае
характеристическое уравнение имеет
третий порядок. Нетрудно видеть, что
условие положительности всех коэффициентов
выполняется всегда, если выполнено
условие
![]() ,
что будет при правильном согласовании
направления вращения двигателя со
знаком рассогласования.
,
что будет при правильном согласовании
направления вращения двигателя со
знаком рассогласования.
Дополнительное
условие
![]() ,
накладываемое на коэффициенты
характеристического уравнения, сводится
при подстановке значений коэффициентов
,
накладываемое на коэффициенты
характеристического уравнения, сводится
при подстановке значений коэффициентов
![]() ,
к неравенству
,
к неравенству
![]() , (5.13)
, (5.13)
которое является условием устойчивости рассматриваемой системы.
Из этого неравенства, в частности, можно заметить, что увеличение каждой постоянной времени сказывается отрицательно на устойчивости системы, так как при этом снижается предельное значение общего коэффициента усиления К , при котором система еще остается устойчивой.