

Замкнутые схемы управления эп
Замкнутые структуры ЭП применяются в тех случаях, когда требуется обеспечить движение исполнительных органов рабочих машин с высокими показателями — большими диапазоном регулирования скорости и точностью ее поддержания, заданным качеством переходных процессов и точностью остановки, а так высокой экономичностью или оптимальным функционированием технологического оборудования и самого ЭП. Основным признаком замкнутых структур является такое автоматическое управление ЭП, при котором ЭП наилучшим образом выполняет свои функции при всевозможных управляющих и внешних возмущениях, действующих на рабочую машину или ЭП.
Замкнутые
структуры ЭП строятся по принципам
компенсации возмущения и отклонения,
называемому также принципом обратной
связи. Рассмотрим принцип компенсации
наиболее характерного внешнего
возмущения ЭП, момента нагрузки
![]() при
регулировании скорости w.
Основным признаком замкнутой
структуры ЭП является наличие цепи, по
которой на вход ЭП (рис. 11.1,я) вместе с
задающим сигналом скорости
при
регулировании скорости w.
Основным признаком замкнутой
структуры ЭП является наличие цепи, по
которой на вход ЭП (рис. 11.1,я) вместе с
задающим сигналом скорости
![]() подается сигнал
подается сигнал
![]() пропорциональный моменту нагрузки
пропорциональный моменту нагрузки
![]() ,
В результате этого управление ЭП
осуществляется суммарным сигналом
,
В результате этого управление ЭП
осуществляется суммарным сигналом
![]() ,
который автоматически изменяется
в нужную сторону при колебаниях момента
нагрузки, обеспечивая с помощью системы
управления поддержание скорости ЭП
на заданном уровне.
,
который автоматически изменяется
в нужную сторону при колебаниях момента
нагрузки, обеспечивая с помощью системы
управления поддержание скорости ЭП
на заданном уровне.
Несмотря на свою эффективность, ЭП по схеме рис. 11.1, а выполняются редко из-за отсутствия простых и надежных датчиков момента нагрузки Мс (возмущающего воздействия).
В
связи с таким положением подавляющее
большинство замкнутых структур
электропривода строятся по принципу
отклонения (обратной связи). Он
характеризуется наличием цепи обратной
связи, соединяющей выход ЭП с его входом,
откуда и пошло название замкнутых схем.
Применительно к рассматриваемому
примеру регулирования скорости признаком
этой структуры является цепь, обратной
связи (рис. 11,1,б), по которой информация
о текущем значении скорости подается
на вход ЭП, где он вычитается из сигнала
задания скорости
![]() .
Управление ЭП осуществляется сигналом
отклонения
.
Управление ЭП осуществляется сигналом
отклонения
![]() . Этот сигнал при отличии скорости от
заданного уровня автоматически
изменяется необходимым образом и
устраняет с помощью системы управления
ЭП эти отклонения. Тем самым управление
движением осуществляется с учетом его
результата.
. Этот сигнал при отличии скорости от
заданного уровня автоматически
изменяется необходимым образом и
устраняет с помощью системы управления
ЭП эти отклонения. Тем самым управление
движением осуществляется с учетом его
результата.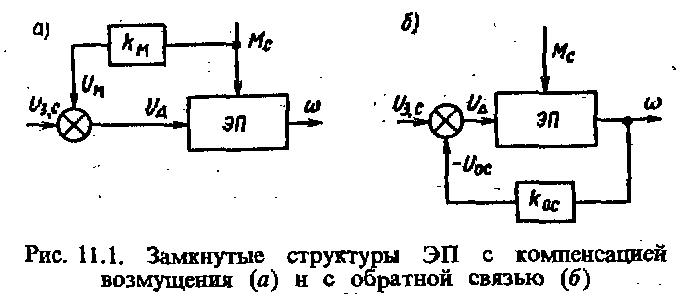
Схемы замкнутых структур электропривода
Замкнутые
структуры ЭП строятся по принципам
компенсации возмущения и отклонения,
называемому также принципом обратной
связи. Рассмотрим принцип компенсации
наиболее характерного внешнего
возмущения ЭП, момента нагрузки
![]() при
регулировании скорости w.
Основным признаком замкнутой
структуры ЭП является наличие цепи, по
которой на вход ЭП (рис. 11.1,я) вместе с
задающим сигналом скорости
при
регулировании скорости w.
Основным признаком замкнутой
структуры ЭП является наличие цепи, по
которой на вход ЭП (рис. 11.1,я) вместе с
задающим сигналом скорости
![]() подается сигнал
подается сигнал
![]() пропорциональный моменту нагрузки
пропорциональный моменту нагрузки
![]() ,
В результате этого управление ЭП
осуществляется суммарным сигналом
,
В результате этого управление ЭП
осуществляется суммарным сигналом
![]() ,
который автоматически изменяется
в нужную сторону при колебаниях момента
нагрузки, обеспечивая с помощью системы
управления поддержание скорости ЭП
на заданном уровне.
,
который автоматически изменяется
в нужную сторону при колебаниях момента
нагрузки, обеспечивая с помощью системы
управления поддержание скорости ЭП
на заданном уровне.
Несмотря на свою эффективность, ЭП по схеме рис. 11.1, а выполняются редко из-за отсутствия простых и надежных датчиков момента нагрузки Мс (возмущающего воздействия).
В
связи с таким положением подавляющее
большинство замкнутых структур
электропривода строятся по принципу
отклонения (обратной связи). Он
характеризуется наличием цепи обратной
связи, соединяющей выход ЭП с его входом,
откуда и пошло название замкнутых схем.
Применительно к рассматриваемому
примеру регулирования скорости признаком
этой структуры является цепь, обратной
связи (рис. 11,1,б), по которой информация
о текущем значении скорости подается
на вход ЭП, где он вычитается из сигнала
задания скорости
![]() .
Управление ЭП осуществляется сигналом
отклонения
.
Управление ЭП осуществляется сигналом
отклонения
![]() . Этот сигнал при отличии скорости от
заданного уровня автоматически
изменяется необходимым образом и
устраняет с помощью системы управления
ЭП эти отклонения. Тем самым управление
движением осуществляется с учетом его
результата.
. Этот сигнал при отличии скорости от
заданного уровня автоматически
изменяется необходимым образом и
устраняет с помощью системы управления
ЭП эти отклонения. Тем самым управление
движением осуществляется с учетом его
результата.
Схема
с общим усилителем
(рис. 11.3). Принятые
на схеме обозначения элементов
соответствуют общей схеме ЭП рис.
1.1, за исключением электродвигателя,
представленного для удобства анализа
в виде двух частей—электрической ЭЧД
и механической МЧД. Схема обеспечивает
регулирование двух координат
ЭП—скорости и тока (момента). В этой
схеме сигналы обратных связей по току
![]() и
скорости
и
скорости
![]() подаются
на ввод управляющего устройства
YY вместе с задающим сигналом
скорости
подаются
на ввод управляющего устройства
YY вместе с задающим сигналом
скорости
![]() где
алгебраически суммируются со своими
знаками. Схема отличается простотой
реализации, но не позволяет регулировать
координаты ЭП независимо друг от друга.
В этой схеме за счет использования
нелинейных обратных связей, называемых
в теории ЭП отсечками, удается в
некотором диапазоне изменения
координат осуществлять их независимое
регулирование, что частично устраняет
указанный недостаток.
где
алгебраически суммируются со своими
знаками. Схема отличается простотой
реализации, но не позволяет регулировать
координаты ЭП независимо друг от друга.
В этой схеме за счет использования
нелинейных обратных связей, называемых
в теории ЭП отсечками, удается в
некотором диапазоне изменения
координат осуществлять их независимое
регулирование, что частично устраняет
указанный недостаток.