

Р. А. Файзрахманов, А. В. Кычкин, Р. Р. Бакунов, А. С. Мехоношин
ПОДВИЖНАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА РЕАЛЬНОГО ВРЕМЕНИ
Предложена структура подвижной информационно-измерительной системы реального времени, контролируемая и контролирующая подсистемы которой объединены и построены на основе сети взаимодействующих между собой мобильных регистраторов (МР). Построена модель передачи измерительной и управляющей информации, гарантирующая работу системы в режиме реального времени за счет организации доступа к среде с разделением во времени. Рассматриваются результаты оптимизации сетевого протокола канального уровня, реализующего предложенную модель.
Ключевые слова: информационно-измерительная система, распределенная автоматизированная система, система реального времени, мобильный регистратор, датчик, сетевой протокол.
-
Введение
Очень часто объект управления рассматривается как распределенный в пространстве, и по-настоящему универсальная модель сбора данных должна учитывать этот фактор.
Пусть имеется ряд объектов, вовлеченных в некий процесс, требующий управления. Состояние каждого объекта определяется вектором параметров. Объекты расположены определенным образом на территории управляемого комплекса. В качестве примера можно привести цистерны, расположенные на каком-либо производственном комплексе. Цистерны содержат некие вещества. В рассматриваемом случае в качестве параметров объектов управления можно рассматривать температуру вещества, давление в цистерне, концентрацию примесей в воздухе в районе базирования цистерны и т.д.
Возникает вопрос, связанный со способом сбора информации о параметрах объектов управления. Использование «классического» подхода (когда датчики, расположенные на объекте управления, связаны с центром обработки данных с помощью различных проводных и беспроводных интерфейсов) не является универсальным решением, т.к. очень часто на современных производствах присутствует колоссальный уровень электромагнитного излучения, что вызывает зашумление информационных сигналов. Кроме того, в том случае, когда местоположение объектов управления может изменяться, потребуется перестройка инфраструктуры системы сбора данных (прокладка новых кабелей и т.д.), что вызовет дополнительные временные и финансовые затраты.
Одним из наиболее выигрышных решений на пути к универсализации моделей сбора данных является использование мобильных регистраторов (МР). Задачей МР является сбор данных с датчиков, установленных на самих МР или на объектах управления. МР перемещаются по определенным маршрутам.
-
Организация подвижной информационно-измерительной системы реального времени
Передаваемая информация поступает в локальные и глобальные центры управления. В центрах управления должны работать специально обученные технологи. Предполагается наличие базы данных, содержащей сведения обо всех значениях параметров объектов управления, обо всех возможных событиях и состояниях МР. Кроме того, база данных должна хранить координаты объектов управления и МР. Схематичное изображение представленной системы показано на рисунке 1.
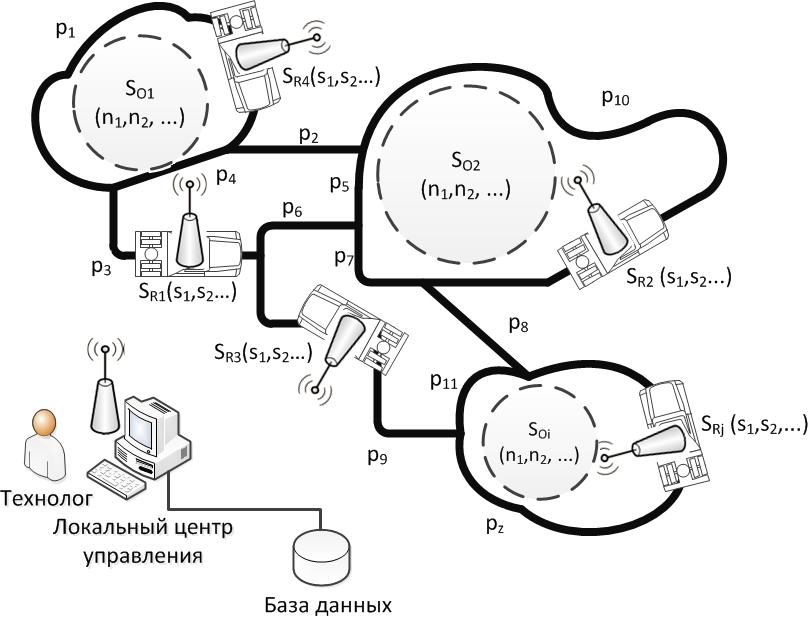
Рисунок 1 – Схематичное изображение подвижной измерительной системы
Пусть
 – количество объектов управления,
– количество объектов управления,
 –
количество параметров каждого объекта
управления,
–
количество параметров каждого объекта
управления,
 – количество МР,
– количество МР,
 – количество параметров каждого МР.
(Для простоты предполагается, что у всех
объектов управления в системе измеряются
одни и те же параметры; одни и те же
параметры контролируются и у всех МР.)
– количество параметров каждого МР.
(Для простоты предполагается, что у всех
объектов управления в системе измеряются
одни и те же параметры; одни и те же
параметры контролируются и у всех МР.)
Необходимые пояснения относительно модели подвижной системы приведены в таблице 1.
Таблица 1 – Элементы математической модели системы
|
Элементы модели системы |
Пояснения |
|
|
Вектор состояния конкретного объекта управления |
|
|
Вектор состояния конкретного МР |
|
|
Матрица состояний объектов управления |
|
|
Матрица состояний МР |
|
|
Множество
всех возможных маршрутов (количество
которых равно
|
|
|
Матрица маршрутов МР |
|
|
Координаты
конкретного МР определяются вектором
|
|
|
Матрица координат МР |
|
|
Вектор, определяющий координаты конкретного объекта управления |
|
|
Матрица координат объектов управления |
|
|
Уравнение, описывающее модель системы |





 )
МР
)
МР

 (для простоты рассматриваются координаты
на плоскости)
(для простоты рассматриваются координаты
на плоскости)



Как видно из предложенной модели, для функционирования измерительно-управляющей системы необходимо организовать передачу различной информации (значения параметров объектов управления, значения параметров МР, а также координат объектов управления и МР).