

3.3. Задание 2 Исходные данные
Расчет сходимости процесса поочередного уравновешивания мостовой схемы двумя регулирующими органами.
Для
измерения прогиба резца используется
индуктивный датчик
с индуктивностью L
и
активным сопротивлением R1.
Индуктивный
датчик включен в мостовую схему
переменного тока с предварительным
автоматическим аналоговым поочередным
уравновешиванием по двум параметрам.
Структурная
схема системы состоит из источника
питания мостовой схемы
переменным напряжением, усилителя
напряжения разбаланса
мостовой схемы, индикатора равновесия
и двух двигателей,
роторы которых через редукторы соединены
с регулирующими
потенциометрами Ri
и
Rj,
мостовой
схемы. При этом
в плечо ас
мостовой
схемы включен индуктивный датчик
(Z1=R1+jωL);
в
плечо ad
– потенциометр
R2
(Z2
= R2);
в плечо db
–
потенциометр R3
с параллельно соединенным конденсатором
С
 ;
в плечо cb
– потенциометр R3
(Z3
= R3).
;
в плечо cb
– потенциометр R3
(Z3
= R3).
В табл. 2 приведены исходные данные для десяти вариантов.
Таблица 2
|
Номер варианта |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Индуктивность датчика L, Гн |
0,01 |
0,02 |
0,03 |
0,04 |
0,05 |
0,06 |
0,07 |
0,08 |
0,09 |
0,1 |
|
Активное сопротивление R1, Ом |
50 |
100 |
150 |
200 |
250 |
300 |
350 |
400 |
450 |
500 |
|
Угол нечувствительности ε, º |
3 |
5 |
7 |
9 |
11 |
13 |
12 |
10 |
8 |
6 |
|
Начальный разбаланс мостовой схемы Uнач, В |
1,0 |
1,1 |
1,2 |
1,3 |
1,4 |
1,5 |
1,6 |
1,7 |
1,8 |
1,9 |
|
Конечный разбаланс мостовой схемы Uконечн, В |
0,001 |
0,002 |
0,004 |
0,006 |
0,008 |
0,01 |
0,012 |
0,014 |
0,016 |
0,018 |
В табл. 3 указаны регулируемые параметры мостовой схемы.
Таблица 3
|
Предпоследняя цифра шифра |
0, 1, 2 |
3, 4 |
5, 6, 7 |
8, 9 |
|
Регулируемые параметры |
R2, R3 |
R2, C |
R4, R3 |
R4, C |
Методические указания к выполнению контрольной работы Задание 2.
В контрольной работе требуется найти величины сопротивлений R2, R3, R4, емкость С, рассчитать число циклов поочередного уравновешивания и нарисовать электрическую схему моста.
Максимальная чувствительность мостовой схемы достигается при
![]()
Так как
![]()
а Z2 = R2 и Z4 = R4, то
![]()
Для определения величин R3 и C воспользуемся условием равновесного состояния мостовой схемы
![]()
После подстановки комплексных значений сопротивлений и ряда преобразований получим условие равновесия мостовой схемы в комплексной форме
![]()
где ω = 2 π f – круговая частота питающего мостовую схему напряжения (f = 5 · 103 Гц).
Разделив вещественную мнимую части, получим два уравнения равновесного состояния мостовой схемы
 .
.
Определяем R3 и С
![]()
Зная все параметры мостовой схемы, можно определить угол сходимости мостовой схемы по формуле
![]()
где
Н
= Z1Z3
– Z3Z4,
или после подстановки
![]() Rj
и Rj
– регулируемые параметры.
Rj
и Rj
– регулируемые параметры.
В общем случае процесс поочередного уравновешивания состоит в построении на плоскости уравновешивания последовательности положений выходных потенциальных точек мостовой схемы после каждой регулировки и подсчета числа регулировок, необходимых для достижения минимального значения напряжения разбаланса мостовой схемы.
В случае линейных статических характеристик мостовой схемы число регулировок может быть определено из следующего выражения
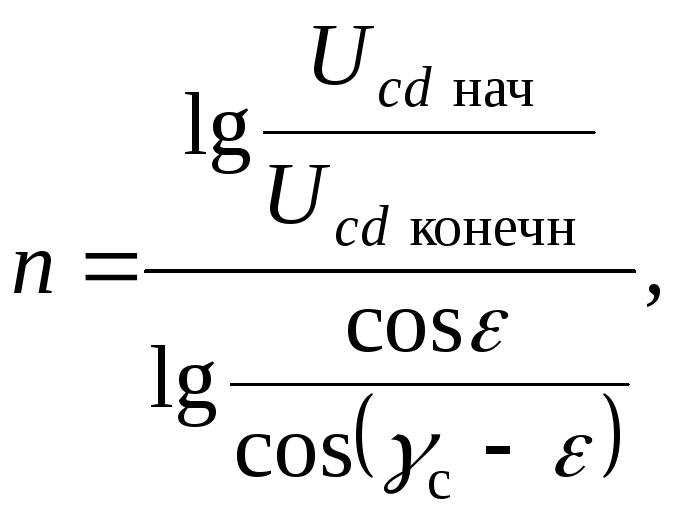
где Ucd нач – величина начального разбаланса мостовой схемы; Ucd конеч – величина конечного разбаланса мостовой схемы; ε – угол нечувствительности индикатора равновесия.
Вопросы для САМОПРОВЕРКИ
-
Как вы понимаете следующие термины: измерения, контроль, средство измерения, метод и принцип измерений?
-
Приведете классификацию погрешности измерений по способу математического представления и виду их зависимости от входной величины.
-
Как классифицируются погрешности по виду их зависимости от влияющих величин, характеру проявления и изменчивости измеряемой величины?
-
Какие виды измерений бывают?
-
Перечислите основные методы измерений и приведите примеры иллюстрирующие их.
-
Перечислите основные виды средств измерений.
-
Дайте общую характеристику измерительных сигналов.
-
Перечислите основные виды измерительных сигналов.
-
Какие сигналы называются дискретными и квантоваными?
-
Перечислите основные виды преобразований измерительных сигналов и дайте их краткую характеристику.
-
Какие задачи решают следующие виды преобразований квантование, дискретизация и восстановление сигналов?
-
В чем состоит фильтрация, модуляция и детектирование сигналов?
-
Какие виды кодирования кодировании измерительной информации существуют?
-
Опишите основные структурные блоки измерительных средств.
-
Приведите основные схемы включения измерительных преобразователей.
-
Опишите особенности ввода измерительной информации в ЭВМ.
-
Перечислите основные этапы построения измерительных средств.
-
Приведите основные статические характеристики средств измерений.
-
Что понимается под динамическими характеристиками средств измерений?
-
Перечислите основные принципы построения измерительных цепей прямого преобразования.
-
Какие виды измерительных цепей уравновешивания существуют?
-
Перечислите основные методы повышения точности приборов и охарактеризуйте их.
-
На какие классы можно разделить измерительные преобразователи?
-
Перечислите основные физические эффекты, используемые для параметрических первичных измерительных преобразователей.
-
Какие основные физические эффекты используются для генераторных первичных измерительных преобразователей?
-
Приведите схемы включения параметрических преобразователей.
-
Опишите конструкцию резистивных преобразователей реостатного типа и область их применения.
-
Опишите конструкцию тензорезистивных преобразователей и схемы их подключения.
-
Перечислите основные виды погрешностей тензорезистивных преобразователей.
-
Приведите основные расчетные зависимости для мостовых измерительных схем.
-
Опишите принцип действия индуктивные преобразователей
-
Какие виды индуктивных преобразователей существуют?
-
Опишите особенности конструкции индуктивных преобразователей. индуктивных преобразователей.
-
Для измерения каких величин приминаются магнитоупругие ИП.
-
От каких параметров электростатических преобразователей зависит их емкость?
-
Приведите схемы включения схемы включения.
-
Пьезоэлектрические преобразователи: принцип действия, конструктивные особенности и схемы включения.
-
Перечислите основные разновидности индукционных измерительных преобразователей.
-
Опишите принцип действия индукционных измерительных преобразователей.
-
Перечислите основные виды приемников оптического излучения.
-
Какие виды дискретных измерительных преобразователей существуют?
-
Перечислите виды электроконтактных ИП.
-
Опишите принцип действия энкодеров.
-
Какие измерительные преобразователи используются в устройствах синхронной связи?
-
Приведите основные схемы включения сельсинов.
-
Какие измерительные преобразователи используются в системах ЧПУ для определения положения рабочих органов.
-
Опишите конструкцию и принцип действия вращающихся трансформаторов.
-
Какие схемы включения вращающихся трансформаторов используются?
-
Дайте определение индуктосина, опишите его конструкцию и принцип действия.
-
Какое основное требование предъявляется к тахогенераторам? Опишите принцип действия тахогенераторов.
-
Перечислите основные виды тахогенераторов.
-
Опишите конструкцию фотоэлектрических преобразователей линейных перемещений.
-
Какие контактные средства используются при измерении линейных и угловых величин?
-
Перечислите основные виды бесконтактных измерений линейных и угловых величин
-
Какие виды средств измерений используются для продольных деформаций?
-
Какие средства используют для измерения частоты вращения?
-
Какие методы используются для измерения линейной и угловых скоростей?
-
Какие средства используются для измерения механических колебаний?
-
Перечислите средства измерение сил.
-
Какими средствами можно измерить величину крутящего момента?
-
Перечислите основные виды средств измерения температуры.
-
Какие схемы включения терморезистивных преобразователей используются?
-
Какие основные погрешности учитываются при подключении термопар?
-
Какими методами и средствами проводится оценка качества обработанных поверхностей?
-
Как можно контролировать силовые параметры процесса обработки резаньем?
-
Как производится оценка тепловыделения в зоне резания?
-
Изложите цели построения и назначение информационно-измерительных систем.
-
Приведите обобщенную структуру информационно-измерительных систем.
-
Перечислите основные элементы ИИС и дайте их краткую характеристику.
-
Опишите сущность технологии виртуальных приборов. технологии «виртуальных приборов».