

9.5. Деякі відомості про способи нарізання зубчастих коліс
Сучасні методи нарізування поверхонь зубців зубчастих коліс достатньо різноманітні і нараховують у загальній кількості близько десятка найменувань. Водночас можна виділити два принципово різних способи: копіювання та обкатки.
Метод копіювання – профіль зубців дістають як копію контуру робочої частини зуборізного інструменту. Інструментом у цьому випадку є дискові або пальцеві фрези, які послідовно прорізають впадини між зубцями (рис. 9.8, а, б). Тобто за кожний хід фрези вздовж осі колеса виходить нарізаною одна впадина. Основні недоліки цього методу – це відносно низька продуктивність, мала точність та потреба великої кількості зуборізного інструменту, оскільки форма профілю зубців залежить не тільки від модуля, а й від числа зубців зубчастого колеса.
Метод обкатки (огинання) – основний, більш продуктивний та точний метод нарізування зубців. У цьому випадку одночасно нарізується кілька зубців. Профіль зубців утворюється у вигляді огинаючої лінії послідовних положень різальних кромок інструменту, тобто інструмент ніби обкочує колесо, що нарізується.
При способі обкатки заготовці та ріжучому інструменту, що має зубчасту форму (черв’ячна фреза, рейка, довбач), надають на верстаті такі рухи одне відносно одного, які відтворюють процес зачеплення (рис. 9.8, в, г, д). Це зачеплення інструменту та заготовки називається верстатним. Тобто, ріжучому інструменту, наприклад, довбачу, та заготовці надають той відносний рух, який мали б два зубчасті колеса, що перебувають у правильному зачепленні. Крім рухів, що відтворюють процес зачеплення, інструменту надається ще технологічний рух різання. При цьому ріжучі кромки інструменту описують зубчасту поверхню, яка називається “продукуючою”.
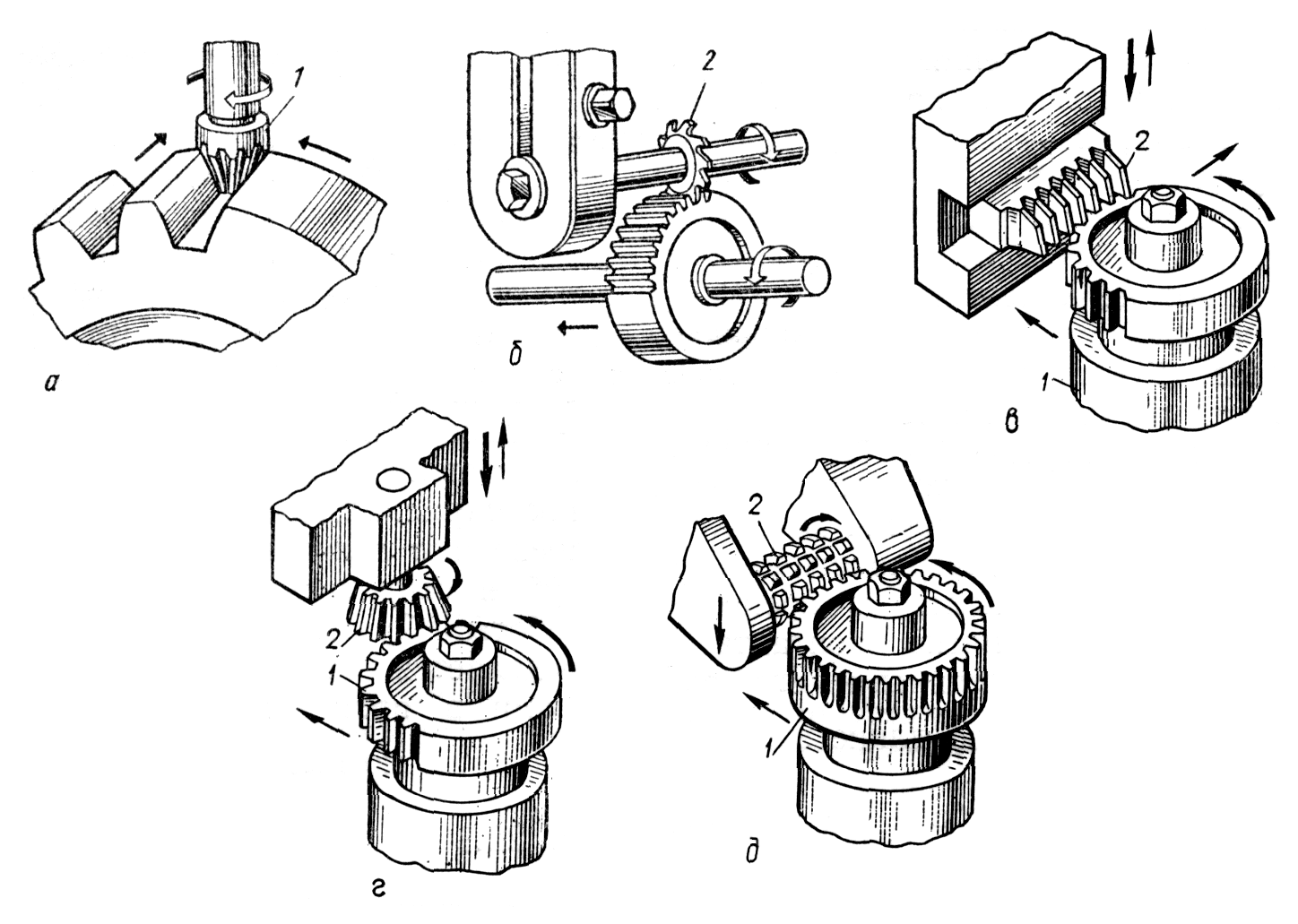
Рис. 9.8
При способі обкатки одним інструментом можна нарізувати зубчасті колеса з різним числом зубців даного модуля (оскільки зубчасте колесо даного модуля може ввійти в зачеплення з іншим колесом цього модуля з будь-яким числом зубців). У випадку інструменту – довбача, можна нарізувати колеса як зовнішнього так і внутрішнього зачеплень. При безмежному збільшенні діаметра та числа зубців довбача, будемо мати інструментальну рейку – найбільш простий, дешевий та точний інструмент для нарізування зубців за методом обкочування. Принцип стругання з почерговими робочими та холостими ходами інструменту, який має місце при нарізуванні зубців довбачем та рейкою, не забезпечує високої продуктивності. Якщо замінити інструментальну рейку черв’ячною фрезою, що має у нормальному перерізі профіль рейки, то процес стругання замінюється неперервним, більш продуктивним процесом фрезерування. Цей спосіб нарізування зубців має переважне застосування. Він використовується для коліс як з прямими, так і з косими зубцями. Відзначимо, що метод обкатки застосовується і для нарізування зубців конічних зубчастих коліс, яке здійснюється на спеціальних верстатах.
9.6. Початковий (вихідний) контур зубчастих коліс
Для забезпечення зачеплення евольвентних зубчастих коліс, що виготовляються у різних умовах, необхідно, щоб будь-яке колесо відповідало вимогам стандарту, що встановлює основні параметри зачеплення. Стандарт на параметри зубчастої рейки встановлений на основі властивості спряженості прямолінійного профілю рейки з евольвентою кола.
При безмежно великому діаметрі основного кола зубчасте колесо перетворюється у зубчасту рейку (всі кола перетворюються у паралельні прямі), а евольвентний профіль зубця – у прямолінійний (надзвичайно зручний для виготовлення та контролю розмірів). Можливість зачеплення евольвентного зубчастого колеса із зубчастою рейкою має важливе практичне значення, що дозволяє виготовляти зуборізний інструмент у вигляді рейки із зубцями прямолінійного профілю (який можна виготовити порівняно дешево та достатньо точно).
В основу рейкового інструменту в нашій країні покладено стандартний початковий (вихідний) продукуючий рейковий контур (рис. 9.9)
Профілювання зубців евольвентного профілю та інструменту для їх нарізування здійснюється відповідно до початкового контуру.
Рейковий контур, покладений в основу стандарту, тобто, прийнятий в якості базового для визначення теоретичних форм і розмірів зубчастих коліс, називається теоретичним початковим (вихідним) контуром, або початковим контуром.
Параметри початкового контуру стандартизовані, оскільки він визначає геометрію зуборізного інструменту і зубчастих коліс.
На рис. 9.9 зображено початковий контур для циліндричних евольвентних коліс за ГОСТ 13755-81. Це прямобічний рейковий контур. Профіль зубців є прямолінійним на однаковій довжині по обидва боки від середньої лінії с-с, на якій товщина зубця та ширина западини рівні між собою. Середня лінія рейки називається ділильною прямою. Зазначимо, профіль зуба ріжучого інструменту відрізняється від початкового профілю тим, що висота головки збільшена на величину радіального зазору (штрихова лінія).
Стандартом встановлені наступні параметри та коефіцієнти початкового контуру: кут профілю =20; коефіцієнт висоти головки зуба ha*=1,0; коефіцієнт радіального зазору с*=0,25; коефіцієнт радіуса кривини перехідної кривої *f=0,38. Абсолютні розміри зуба вихідного контуру отримують множенням перелічених коефіцієнтів на модуль.
Згідно з названими параметрами початкового контуру, розміри зубців нормального евольвентного зачеплення визначають за формулами:
висота головки
зубців ha=
h![]()
m;
m;
висота ніжки зубців
hf
=
h![]()
m
= (h
m
= (h![]() +
c
+
c![]() )m;
)m;
висота зубців h
= hf
+ ha=
( 2h![]() +
c
+
c![]() )m;
)m;
радіус кривини перехідної кривої f =*f m;
радіальний зазор
c = c![]()
m.
m.
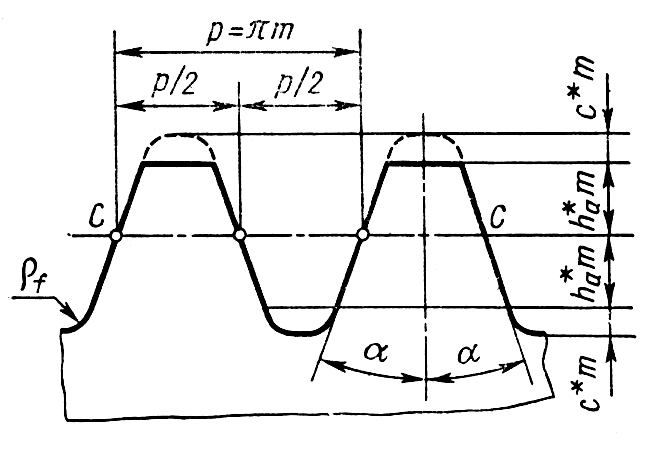
Рис. 9.9
Вихідний контур
відрізняється від контуру робочої рейки
збільшеною на
![]() висотою головки зуба, необхідної для
утворення більшої глибини западини, що
забезпечує радіальний зазор у зачепленні.
висотою головки зуба, необхідної для
утворення більшої глибини западини, що
забезпечує радіальний зазор у зачепленні.
Діаметр вершини зубців та діаметр западин зубчастого колеса можна визначити за виразами:
da
= d
+ 2ha
= mz
+ 2h![]() m;
m;
df
= d
- 2hf
= mz
- 2h![]() m
= mz
- 2(h
m
= mz
- 2(h![]() +c
+c![]() )m.
)m.
Зазначимо, для спеціальних цілей деколи застосовують початкові контури з деякими іншими параметрами. Ці контури не стандартизовані.