

Искусственные механические характеристики ад при изменении параметров цепей статора, ротора и питающей сети.
Искусственные механические характеристики АД можно получить введением в цепь ротора или статора добавочного сопротивления, изменением величины и частоты питающего напряжения и т.п. Рассмотрим, какое влияние на механические характеристики двигателя оказывают перечисленные факторы.
-
При изменении подводимого к двигателю напряжения изменяется момент, т.К. Он пропорционален квадрату напряжения.
С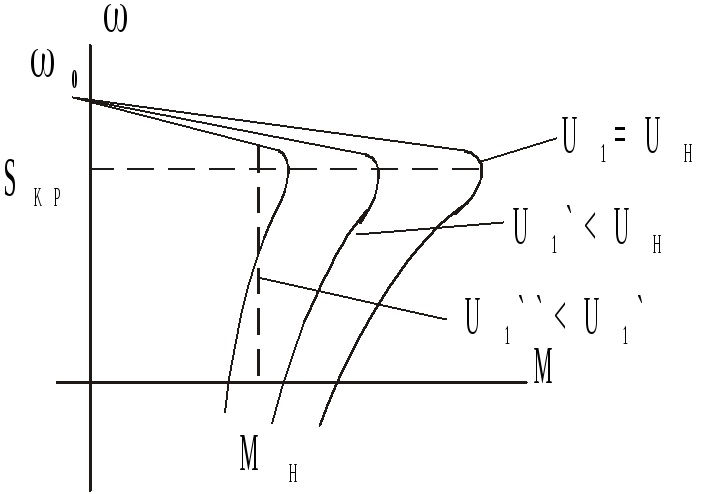 инхронная
скорость 0 и
критическое скольжение, а также форма
характеристики сохраняются. Изменится
величина скорости при МН, однако,
это изменение будет незначительным.
Уменьшение напряжения приводит к
значительному снижению перегрузочной
способности М,
но снижается и ток холостого хода. При
U1=UHOM
магнитная цепь АД насыщена. Увеличение
U1 при f=const
приводит при равных условиях к быстрому
увеличению тока намагничивания. Т.к. у
двигателей нормального исполнения ток
холостого хода
инхронная
скорость 0 и
критическое скольжение, а также форма
характеристики сохраняются. Изменится
величина скорости при МН, однако,
это изменение будет незначительным.
Уменьшение напряжения приводит к
значительному снижению перегрузочной
способности М,
но снижается и ток холостого хода. При
U1=UHOM
магнитная цепь АД насыщена. Увеличение
U1 при f=const
приводит при равных условиях к быстрому
увеличению тока намагничивания. Т.к. у
двигателей нормального исполнения ток
холостого хода
![]() ,
превышение U1 на
(2030)% может увеличить
I0 до значений,
превышающих I1H,
и двигатель может нагреваться сверх
допустимой температуры даже при
отсутствии полезной нагрузки.
,
превышение U1 на
(2030)% может увеличить
I0 до значений,
превышающих I1H,
и двигатель может нагреваться сверх
допустимой температуры даже при
отсутствии полезной нагрузки.
-
Введение добавочного активного и индуктивного сопротивления в цепь статора. Для ограничения величины пускового тока к.з. АД иногда в цепь статора вводят добавочное активное или индуктивное сопротивления. При этом уменьшаются критический момент и критическое скольжение в двигательном режиме. Скорость, соответствующая критическому скольжению, несколько возрастает. Семейства механических характеристик для этих случаев изображены на рисунках.
В
 ведение
в цепь статора добавочных сопротивлений
вызывает понижение напряжения на его
зажимах и уменьшает броски тока и
пускового момента, что важно для смягчения
ударов в передачах. Правда, в добавочном
активном сопротивлении теряется часть
энергии, а введение добавочного
индуктивного сопротивления уменьшает
коэффициент мощности двигателя.
ведение
в цепь статора добавочных сопротивлений
вызывает понижение напряжения на его
зажимах и уменьшает броски тока и
пускового момента, что важно для смягчения
ударов в передачах. Правда, в добавочном
активном сопротивлении теряется часть
энергии, а введение добавочного
индуктивного сопротивления уменьшает
коэффициент мощности двигателя.
Величина
сопротивления, включаемого в цепь
статора, определяется желаемым значением
пускового тока. Если требуется ограничить
пусковой ток двигателя до значения I![]() = αI
= αI![]() ,
, где α<1,
то для этого полное сопротивление к.з.
в начальный момент пуска должно быть
,
, где α<1,
то для этого полное сопротивление к.з.
в начальный момент пуска должно быть
![]() ,
где
,
где
![]() - полное сопротивление к.з. при номинальных
условиях .
- полное сопротивление к.з. при номинальных
условиях .
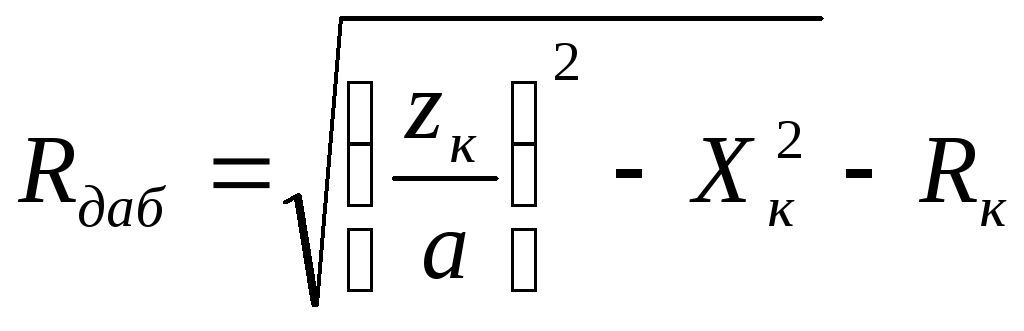
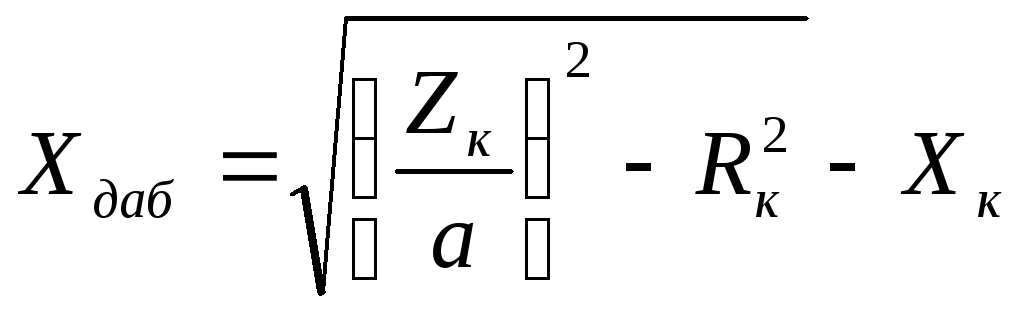
Расчетные
формулы для определения добавочных
сопротивлений можно найти используя
треугольники короткого замыкания.
Видно, что
3. Введение добавочного активного сопротивления в цепь ротора.
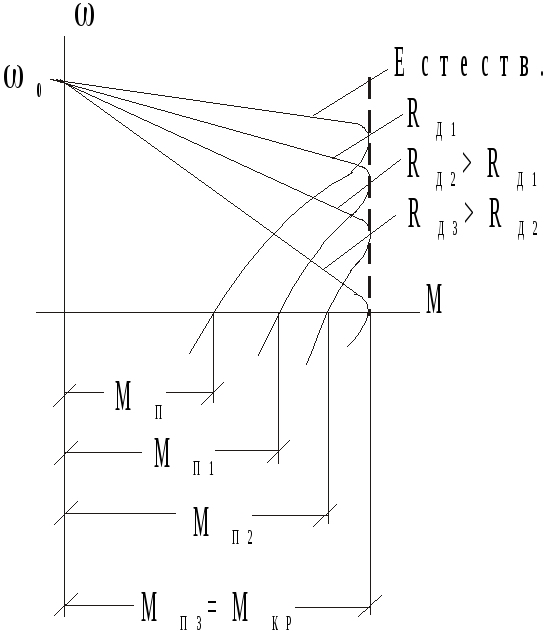
При
введении в цепь ротора AD
добавочного активного сопротивления
увеличивается критическое скольжение,
![]() ,
максимум критического момента смещается
в сторону больших скольжений, а величина
его не меняется, т.к. он не зависит от
активного сопротивления роторной цепи.
Введение в цепь ротора добавочного
активного сопротивления используется
для ограничения пускового тока и
увеличения пускового момента. Можно
ввести такое Rдаб
, при котором критическое скольжение
окажется равным 1 , а пусковой момент
двигателя равным критическому. Физически
увеличение пускового момента объясняется
увеличением активной составляющей
тока ротора (увеличением числа проводников
обмотки ротора, на которые электромагнитные
силы действуют по направлению вращения
и уменьшением числа проводников, на
которые электромагнитные силы действуют
против направления вращения). Семейство
механических характеристик двигателя,
соответствующих разным по величине
Rдаб
, введенным
в цепь ротора , изображено на рисунке.
,
максимум критического момента смещается
в сторону больших скольжений, а величина
его не меняется, т.к. он не зависит от
активного сопротивления роторной цепи.
Введение в цепь ротора добавочного
активного сопротивления используется
для ограничения пускового тока и
увеличения пускового момента. Можно
ввести такое Rдаб
, при котором критическое скольжение
окажется равным 1 , а пусковой момент
двигателя равным критическому. Физически
увеличение пускового момента объясняется
увеличением активной составляющей
тока ротора (увеличением числа проводников
обмотки ротора, на которые электромагнитные
силы действуют по направлению вращения
и уменьшением числа проводников, на
которые электромагнитные силы действуют
против направления вращения). Семейство
механических характеристик двигателя,
соответствующих разным по величине
Rдаб
, введенным
в цепь ротора , изображено на рисунке.
4. Изменение частоты питающей сети.
П ри
изменении частоты питающей сети и
Uсети=U1=const,
меняется ω0=
ри
изменении частоты питающей сети и
Uсети=U1=const,
меняется ω0=![]() и
критический момент, так как он зависит
от частоты обратно пропорционально её
квадрату. Изменяется и магнитный поток,
при чём он уменьшается с ростом частоты
и увеличивается при её уменьшении. Это
видно из уравнения равновесия ЭДС для
одной фазы статора:
и
критический момент, так как он зависит
от частоты обратно пропорционально её
квадрату. Изменяется и магнитный поток,
при чём он уменьшается с ростом частоты
и увеличивается при её уменьшении. Это
видно из уравнения равновесия ЭДС для
одной фазы статора:![]() . Пренебрегая падением напряжения в
цепи статора, можно написать для
абсолютных значений ЭДС и напряжения
при U1=const.
. Пренебрегая падением напряжения в
цепи статора, можно написать для
абсолютных значений ЭДС и напряжения
при U1=const.
![]() .
.
Отсюда видно, что при росте f1 поток уменьшается, а при уменьшении f1 он растет. Этим объясняется и изменение критического момента двигателя и его перегрузочной способности.
У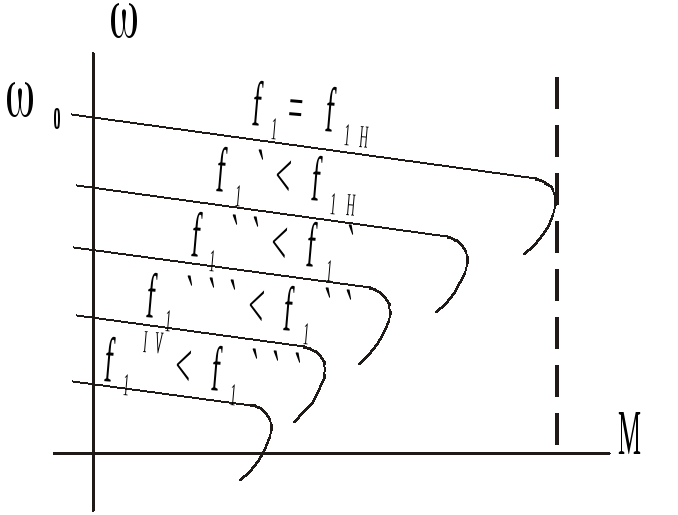 величение
потока ведет к насыщению магнитной цепи
машины, увеличению намагничивающего
тока, следствием чего является ухудшение
энергетических показателей двигателя.
Уменьшение потока при постоянном моменте
нагрузки приведет к увеличению тока
ротора, что видно из выражения
величение
потока ведет к насыщению магнитной цепи
машины, увеличению намагничивающего
тока, следствием чего является ухудшение
энергетических показателей двигателя.
Уменьшение потока при постоянном моменте
нагрузки приведет к увеличению тока
ротора, что видно из выражения
![]() ,
и потребляемого из сети тока, следовательно,
к перегрузке обмоток двигателя при
недоиспользованной стали. В обоих
случаях изменяется перегрузочная
способность двигателя. Поэтому для
наилучшего использования двигателя
желательно всегда поток иметь постоянным.
Для этого при изменении частоты необходимо
изменять и величину подводимого
напряжения, причем не только в функции
частоты, но и в функции нагрузки. В
простейшем же случае при изменении
напряжения в той же степени, что и
частоты, т.е. при
,
и потребляемого из сети тока, следовательно,
к перегрузке обмоток двигателя при
недоиспользованной стали. В обоих
случаях изменяется перегрузочная
способность двигателя. Поэтому для
наилучшего использования двигателя
желательно всегда поток иметь постоянным.
Для этого при изменении частоты необходимо
изменять и величину подводимого
напряжения, причем не только в функции
частоты, но и в функции нагрузки. В
простейшем же случае при изменении
напряжения в той же степени, что и
частоты, т.е. при
![]() ,
механические характеристики будут
выглядеть так, как изображено на рисунке.
Видно, что при
изменении напряжения только в функции
частоты по закону
,
механические характеристики будут
выглядеть так, как изображено на рисунке.
Видно, что при
изменении напряжения только в функции
частоты по закону
![]() при частотах, меньших 0,5
f1Н
перегрузочная способность двигателя
будет уменьшаться.
Это объясняется
влиянием падения напряжения на активном
сопротивлении обмотки статора, которое
приводит к уменьшению напряжения на
намагничивающем контуре обмотки статора,
к уменьшению магнитного потока и
следовательно, к уменьшению критического
момента двигателя.
при частотах, меньших 0,5
f1Н
перегрузочная способность двигателя
будет уменьшаться.
Это объясняется
влиянием падения напряжения на активном
сопротивлении обмотки статора, которое
приводит к уменьшению напряжения на
намагничивающем контуре обмотки статора,
к уменьшению магнитного потока и
следовательно, к уменьшению критического
момента двигателя.