

Математическое описание процессов электромеханического преобразования энергии в двигателе постоянного тока последовательного возбуждения (дпв)
У двигателя последовательного возбуждения
обмотка возбуждения включена
последовательно с обмоткой якоря и его
поток Ф является функцией тока якоря,
т.е. зависит от нагрузки машины.
Принципиальная схема ДПВ изображена
на рис., а схема двухфазной модели ЭМП
двигателя последовательного возбуждения
может быть получена аналогично схеме
модели ЭМП ДНВ при включении обмотки
возбуждения последовательно в цепь
якоря (см. рис. ниже). При быстрых изменениях
нагрузки, следовательно быстрых
изменениях Ф, анализ динамических
свойств двигателя без учета влияния
вихревых токов, наводимых в сердечниках
полюсов и станине, может привести к
значительным ошибкам. Влияние этих
токов может быть учтено добавлением
к.з. обмотки на оси ,
связанной с потоком Ф машины по этой
оси коэффициентом связи, равным 1. С
учетом этой фиктивной обмотки
математическое описание процессов
преобразования энергии в ДПВ имеет вид:
двигателя последовательного возбуждения
обмотка возбуждения включена
последовательно с обмоткой якоря и его
поток Ф является функцией тока якоря,
т.е. зависит от нагрузки машины.
Принципиальная схема ДПВ изображена
на рис., а схема двухфазной модели ЭМП
двигателя последовательного возбуждения
может быть получена аналогично схеме
модели ЭМП ДНВ при включении обмотки
возбуждения последовательно в цепь
якоря (см. рис. ниже). При быстрых изменениях
нагрузки, следовательно быстрых
изменениях Ф, анализ динамических
свойств двигателя без учета влияния
вихревых токов, наводимых в сердечниках
полюсов и станине, может привести к
значительным ошибкам. Влияние этих
токов может быть учтено добавлением
к.з. обмотки на оси ,
связанной с потоком Ф машины по этой
оси коэффициентом связи, равным 1. С
учетом этой фиктивной обмотки
математическое описание процессов
преобразования энергии в ДПВ имеет вид:
![]()
![]()

![]() ,
где
,
где
![]()
Индуктивность рассеяния якорной цепи LЯ ДНВ значительно меньше индуктивности LВ обмотки возбуждения, связанной с главным потоком двигателя, поэтому ею часто пренебрегают. Однако при этом нужно иметь в виду, что при LЯ=0 ток двигателя при изменении скачком приложенного напряжения тоже может измениться скачком.
Для
практического использования написанными
уравнениями в них необходимо исключить
вихревой ток iВ.Т.
и положить
![]() .
Тогда
.
Тогда
![]() ;
;
![]()
Естественные и искусственные электромеханические и механические характеристики дпв
Точное аналитическое выражение механической характеристики ДПВ дать трудно, т.к. Фconst, сложной является и зависимость момента от нагрузки. При номинальном токе магнитная цепь машины насыщена. Для получения достаточно подробного представления о характеристике двигателя воспользуемся кусочно-линейной аппроксимацией характеристики намагничивания.
Н ачальный
участок кривой намагничивания (IЯ0,3IН
и М0,15МН) с
достаточной точностью можно аппроксимировать
прямой
ачальный
участок кривой намагничивания (IЯ0,3IН
и М0,15МН) с
достаточной точностью можно аппроксимировать
прямой
![]() .
Тогда
.
Тогда
![]() откуда
откуда
![]() .
Подставив это в уравнение электромеханической
характеристики, получим:
.
Подставив это в уравнение электромеханической
характеристики, получим:
 .
.
Отсюда
следует, что при малых нагрузках
механическая характеристика ДПВ имеет
гиперболический характер. Второй участок
линейной аппроксимации кривой
намагничивания соответствует значениям
IЯ до 1,3IН
и М до 1,4МН. Для этого участка
справедливы соотношения для потока при
выражении через ток
![]() и через момент
и через момент
![]() ,
где
,
где
 ;
1 – коэффициент
пропорциональности, а Ф0 – поток
остаточной индукции. Если подставить
значения Ф в уравнение электромеханической
характеристики, получим неявно выраженную
гиперболу. При нагрузках когда IЯ1,3IН,
а М1,4МН Ф
остается практически постоянным и
механическая характеристика двигателя
приобретает линейный характер. Скорость
двигателя уменьшается лишь за счет
падения напряжения в якорной цепи.
;
1 – коэффициент
пропорциональности, а Ф0 – поток
остаточной индукции. Если подставить
значения Ф в уравнение электромеханической
характеристики, получим неявно выраженную
гиперболу. При нагрузках когда IЯ1,3IН,
а М1,4МН Ф
остается практически постоянным и
механическая характеристика двигателя
приобретает линейный характер. Скорость
двигателя уменьшается лишь за счет
падения напряжения в якорной цепи.
П
 ри
различных расчетах эл.приводов с ДПВ
обычно применяются графические и
графоаналитические методы с использованием
экспериментальных зависимостей его
скорости, момента, потока от тока якоря,
учитывающих как насыщение, так и влияние
реакции якоря. Эти зависимости приводятся
в каталогах для каждого типа двигателей
в абсолютных, а в справочниках – в
относительных единицах в виде универсальных
характеристик для двигателей до 10 и
выше 10кВт(см. рис.).
ри
различных расчетах эл.приводов с ДПВ
обычно применяются графические и
графоаналитические методы с использованием
экспериментальных зависимостей его
скорости, момента, потока от тока якоря,
учитывающих как насыщение, так и влияние
реакции якоря. Эти зависимости приводятся
в каталогах для каждого типа двигателей
в абсолютных, а в справочниках – в
относительных единицах в виде универсальных
характеристик для двигателей до 10 и
выше 10кВт(см. рис.).
З ная
номинальные данные двигателя и пользуясь
этими универсальными характеристиками
можно, задаваясь различными значениями
тока якоря, найти
и М по кривым
ная
номинальные данные двигателя и пользуясь
этими универсальными характеристиками
можно, задаваясь различными значениями
тока якоря, найти
и М по кривым
![]() и
и
![]() и
построить естественную механическую
характеристику двигателя
и
построить естественную механическую
характеристику двигателя
![]() .
Однако нужно помнить, что это будет
зависимость скорости от момента на
валу.
.
Однако нужно помнить, что это будет
зависимость скорости от момента на
валу.
П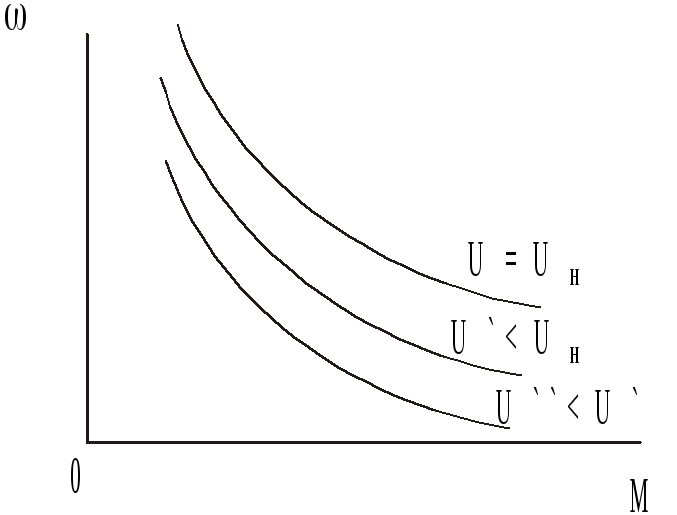
 ри
изменении напряжения на зажимах двигателя
характеристики перемещаются вниз или
ри
изменении напряжения на зажимах двигателя
характеристики перемещаются вниз или
вверх по отношению к естественной. При увеличении сопротивления якорной цепи скорость двигателя уменьшается и характеристики смещаются вниз. Жесткость характеристик при этом уменьшается. Семейства механических характеристик, соответствующих различным напряжениям на зажимах двигателя и различным сопротивлениям якорной цепи изображены на рисунках. Из графиков видно, что скорость ДПВ при работе как на естественной, так и на искусственных характеристиках при увеличении нагрузки резко падает. Характеристики являются мягкими. Поэтому ДПВ непригодны для электроприводов, требующих постоянства скорости при меняющейся нагрузке.
П ри
идеальном холостом ходе скорость
двигателя теоретически может возрасти
до бесконечности. В действительности
всегда имеет место трение в подшипниках,
о воздух и т.п. и есть поток остаточной
индукции, составляющей (0,020,09)ФН.
Поэтому скорость не возрастает до
бесконечности, но может в 57
раз превышать номинальную. Однако во
избежание опасности разноса двигателя
его с приводным механизмом нельзя
соединять при помощи ременной и цепной
передачи. Реверсирование ДПВ осуществляется
путем изменения направления тока в
якоре.Схема предшествующая реверсу, и
схема реверса изображены на соответствующих
рис. Для ограничения первоначального
броска тока в якорную цепь должно быть
введено добавочное сопротивление.
ри
идеальном холостом ходе скорость
двигателя теоретически может возрасти
до бесконечности. В действительности
всегда имеет место трение в подшипниках,
о воздух и т.п. и есть поток остаточной
индукции, составляющей (0,020,09)ФН.
Поэтому скорость не возрастает до
бесконечности, но может в 57
раз превышать номинальную. Однако во
избежание опасности разноса двигателя
его с приводным механизмом нельзя
соединять при помощи ременной и цепной
передачи. Реверсирование ДПВ осуществляется
путем изменения направления тока в
якоре.Схема предшествующая реверсу, и
схема реверса изображены на соответствующих
рис. Для ограничения первоначального
броска тока в якорную цепь должно быть
введено добавочное сопротивление.