

-
Задачі, в яких напруження залежать від і
Серед
таких задач є задачі для кругового
кільця або його частини, в яких напруження
пропорційні
![]() або
або
![]() ,
тобто є функціями вигляду
,
тобто є функціями вигляду
![]() або
або
![]() .
Такому розподілу напружень відповідає
бігармонічна функція
.
Такому розподілу напружень відповідає
бігармонічна функція
![]() , (8.56)
, (8.56)
де
![]() ,
,
![]() – функції тільки
– функції тільки
![]() ;
;
![]() ,
,
![]() – сталі.
– сталі.
Розглянемо
частковий випадок задачі (![]() ;
;
![]() )
і підставимо (8.56) у (8.28). Для визначення
)
і підставимо (8.56) у (8.28). Для визначення
![]() одержимо таке рівняння
одержимо таке рівняння

або
 . (8.57)
. (8.57)
Після
чотирикратного інтегрування (8.57) по
![]() ,
знаходимо
,
знаходимо
![]() . (8.58)
. (8.58)
Тоді функцію напружень (8.56) запишемо у вигляді
![]() . (8.59)
. (8.59)
За формулами (8.27) визначаємо компоненти тензора напружень
![]() ;
;
![]() ; (8.60)
; (8.60)
![]() .
.
Оскільки
![]() – лінійний вираз, тому постійна
– лінійний вираз, тому постійна
![]() у формули (8.60) не входить.
у формули (8.60) не входить.
Компоненти тензора деформації у випадку плоского напруженого стану на підставі (8.22), (8.26) визначаються співвідношеннями
![]() ;
;
![]() ;
;
![]() . (8.61)
. (8.61)
Для визначення компонент вектора зміщення необхідно проінтегрувати рівняння (8.61).
Якщо
розглянути інший частковий випадок
функції
![]() ,
коли
,
коли
![]() ,
,
![]() ,
то одержимо залежності, аналогічні до
(8.58)-(8.61). Об’єднуючи ці два часткові
випадки, функцію напружень подамо у
вигляді
,
то одержимо залежності, аналогічні до
(8.58)-(8.61). Об’єднуючи ці два часткові
випадки, функцію напружень подамо у
вигляді

![]() .
(8.62)
.
(8.62)
8 .4.1. Згин
кривого стержня прямокутного перерізу
силою, прикладеного до незакріпленого
кінця (задача Х.С. Головіна). Розглянемо
кривий стержень з круговою віссю радіусом
.4.1. Згин
кривого стержня прямокутного перерізу
силою, прикладеного до незакріпленого
кінця (задача Х.С. Головіна). Розглянемо
кривий стержень з круговою віссю радіусом
![]() один з торців якого жорстко закріплений,
а до іншого прикладена сила
один з торців якого жорстко закріплений,
а до іншого прикладена сила
![]() ,
що діє перпендикулярно до осі стержня
(рис. 8.9).
,
що діє перпендикулярно до осі стержня
(рис. 8.9).
При
такому навантаженні стержня в довільному
його поперечному перерізі, який
визначається кутом
![]() ,
згинаючий момент пропорційний
,
згинаючий момент пропорційний
![]() .
Природно допустити, що в цьому випадку
напруження
.
Природно допустити, що в цьому випадку
напруження
![]() ,
а отже і функція
,
а отже і функція
![]() також будуть пропорційними
також будуть пропорційними
![]() .
.
Приймаючи функцію напружень у вигляді
 , (8.63)
, (8.63)
за формулами (8.27) знаходимо
 ;
;
 ;
;
 . (8.64)
. (8.64)
Граничні умови задачі мають вигляд
![]() ;
;
![]() ;
;
![]() . (8.65)
. (8.65)
Підставляючи
(8.64) в умови (8.65), запишемо систему рівнянь
для визначення сталих
![]() ,
,
![]() ,
,
![]()
![]() ;
;
![]() ;
;
![]() , (8.66)
, (8.66)
з якої знаходимо
![]() ;
;
![]() ;
;
![]() , (8.67)
, (8.67)
де
![]() .
.
Підставляючи (8.67) у (8.64), одержимо формули для напружень
 ;
;
 ;
;
 . (8.68)
. (8.68)
Р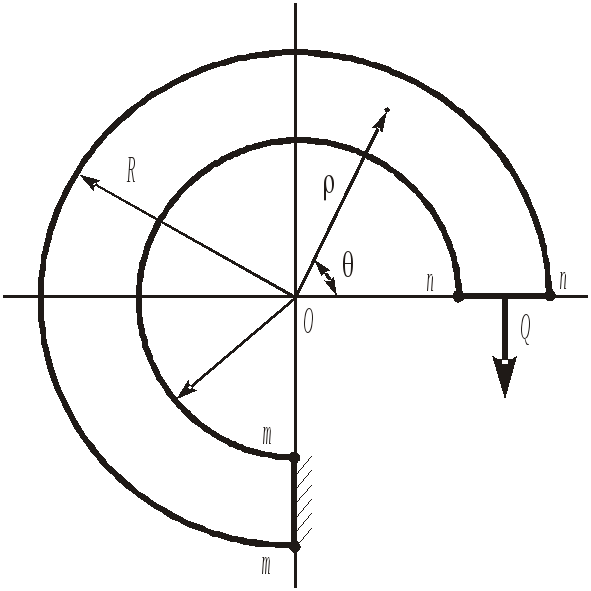 озглянемо
тепер навантаження стержня силою
озглянемо
тепер навантаження стержня силою
![]() ,
яка діє перпендикулярно до вільного
торця (рис. 8.10 а). У цьому випадку згинаючий
момент пропорційний
,
яка діє перпендикулярно до вільного
торця (рис. 8.10 а). У цьому випадку згинаючий
момент пропорційний
![]() .
Приймаючи
.
Приймаючи
![]()
![]() , (8.69)
, (8.69)
за формулами (8.27) знаходимо
Рис.
8.10 а![]()
![]() ;
;
![]() . (8.70)
. (8.70)
З граничних умов задачі
![]() ;
;
![]() ;
;
![]() (8.71)
(8.71)
визначаємо
![]() ;
;
![]() ;
;
![]() . (8.72)
. (8.72)
Підставляючи (8.72) в (8.70), одержимо
 ;
;
 ;
;
 , (8.73)
, (8.73)
де
стала
![]() визначається за формулами (8.67).
визначається за формулами (8.67).
З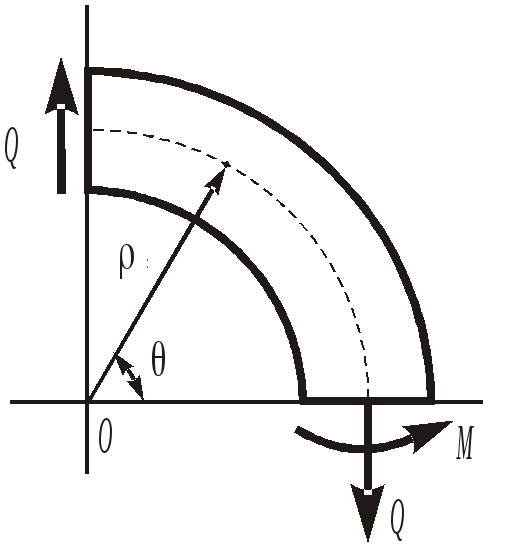 (8.67) випливає, що функція (8.69) визначає
відмінний від (8.71) напружений стан, при
якому в перерізі
(8.67) випливає, що функція (8.69) визначає
відмінний від (8.71) напружений стан, при
якому в перерізі
![]() мають місце тільки дотичні напруження
мають місце тільки дотичні напруження
![]() ,
які зводяться до поперечної сили
,
які зводяться до поперечної сили
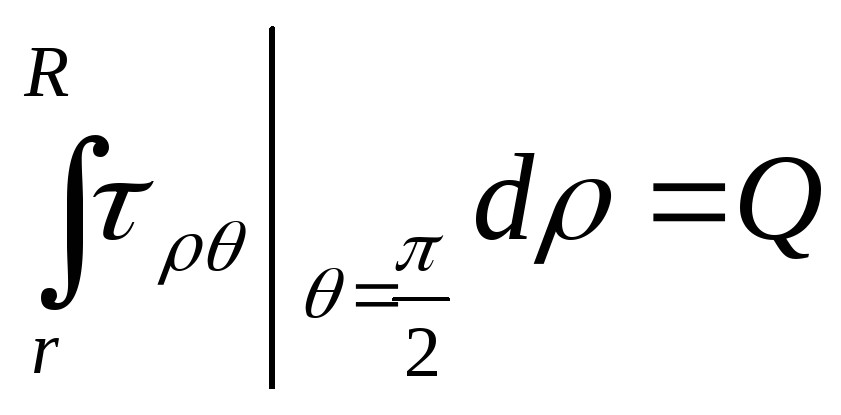 ,
а на вільному торці розподілені сили
,
а на вільному торці розподілені сили
![]() зводяться до сили
зводяться до сили
![]() ,
яка прикладена в центрі торця, і пари
сил з моментом
,
яка прикладена в центрі торця, і пари
сил з моментом
![]() (рис. 8.10 б).
(рис. 8.10 б).
П
Рис.
8.10 б![]() протилежного напрямку, і враховуючи
(8.55), на підставі принципу суперпозиції
одержимо розв’язок поставленої задачі
протилежного напрямку, і враховуючи
(8.55), на підставі принципу суперпозиції
одержимо розв’язок поставленої задачі
 ;
;

![]() ;
;
 . (8.74)
. (8.74)
Маючи розв’язки (8.68) і (8.74), на підставі принципу суперпозиції можна одержати розв’язок задачі про згин розглядуваного стержня силою, довільно напрямленою в його площині і прикладеною до центра вільного торця.
8.4.2.
Двосторонній розтяг нескінченої
пластинки з круговим отвором. Р Рис.
8.11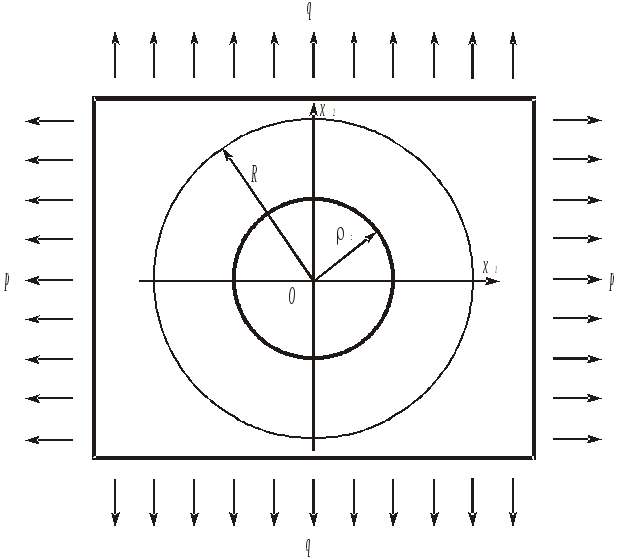
![]() ,
яка перебуває в умовах двостороннього
розтягу (стиску) взаємно перпендикулярними
і рівномірно розподіленими напруженнями
,
яка перебуває в умовах двостороннього
розтягу (стиску) взаємно перпендикулярними
і рівномірно розподіленими напруженнями
![]() і
і
![]() ,
прикладеними “на нескінченності”.
Зовнішнє навантаження на контурі отвору
відсутнє. Систему прямокутних координат
виберемо так, як показано на рис. 8.11.
Розв’язок задачі полягає у визначенні
компонент тензора напружень в кожній
точці площини, зокрема, на контурі
отвору.
,
прикладеними “на нескінченності”.
Зовнішнє навантаження на контурі отвору
відсутнє. Систему прямокутних координат
виберемо так, як показано на рис. 8.11.
Розв’язок задачі полягає у визначенні
компонент тензора напружень в кожній
точці площини, зокрема, на контурі
отвору.
Поряд
з прямокутною виберемо полярну систему
координат
![]() з полюсом в центрі отвору.
з полюсом в центрі отвору.
Розглянемо
коло великого радіуса
![]() з центром в точці
з центром в точці
![]() .
Визначимо на цьому колі значення
компонент тензора напружень у полярній
системі координат. За формулами (8.8)
знаходимо
.
Визначимо на цьому колі значення
компонент тензора напружень у полярній
системі координат. За формулами (8.8)
знаходимо
![]() ;
;
![]()
![]()
![]() . (8.75)
. (8.75)
Співвідношення (8.75) показують, що у даному випадку функцію напружень можна вибрати у вигляді
![]() , (8.76)
, (8.76)
де
![]() – розв’язок (8.34) рівняння (8.32),
– розв’язок (8.34) рівняння (8.32),
![]() – функція змінної
– функція змінної
![]() .
.
Підставляючи
(8.76) у (8.28), приходимо до рівняння для
визначення
![]()
 , (8.77)
, (8.77)
інтегруючи яке, знаходимо
![]() . (8.78)
. (8.78)
Враховуючи (8.34), (8.78), функцію напружень (8.76) запишемо так
![]()
![]() . (8.79)
. (8.79)
Підставляючи (8.79) у (8.27), одержимо вирази для компонент тензора напружень
![]() ;
;
 ; (8.80)
; (8.80)
 .
.
Граничні умови задачі мають вигляд
![]() при
при
![]() ;
;
![]() ;
;
![]() при
при
![]() . (8.81)
. (8.81)
Якщо
підставити (8.80) в умови (8.81), то одержимо
систему рівнянь для визначення сталих
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]()
![]() ;
;
![]() ;
;
![]()
![]() ;
;
 . (8.82)
. (8.82)
Ліві
частини умов (8.82) при
![]() повинні приймати скінчені значення. Це
можливо лише тоді, коли
повинні приймати скінчені значення. Це
можливо лише тоді, коли
![]() .
У цьому випадку система (8.82) перетвориться
до вигляду
.
У цьому випадку система (8.82) перетвориться
до вигляду
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() . (8.83)
. (8.83)
Розв’язуючи (8.83), знаходимо
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() . (8.84)
. (8.84)
Враховуючи (8.84), формули (8.80) запишемо у такому вигляді
 ;
;
 ;
;
![]()
 . (8.85)
. (8.85)
Якщо
в (8.85) покласти
![]() ,
то одержимо вирази для напружень на
контурі отвору
,
то одержимо вирази для напружень на
контурі отвору
![]() ;
;
![]() . (8.86)
. (8.86)
Аналізуючи
формули (8.85), приходимо до висновку, що
напружений стан площини із збільшенням
![]() співпадає з напруженим станом суцільної
пластинки, який визначається за формулами
(8.75). Це означає, що вплив отвору в
нескінченній пластинці має локальний
характер і швидко згасає з ростом
співпадає з напруженим станом суцільної
пластинки, який визначається за формулами
(8.75). Це означає, що вплив отвору в
нескінченній пластинці має локальний
характер і швидко згасає з ростом
![]() .
.
РОЗДІЛ 9