

Нехай функція напружень має вигляд полінома третього степеня
![]() , (7.39)
, (7.39)
який також є розв’язком (7.32) при довільних коефіцієнтах. У цьому випадку за формулами (7.30) визначаємо
![]() ;
;
![]() ;
;
![]() . (7.40)
. (7.40)
Розглянемо
поліном (7.39) при деяких часткових
значеннях коефіцієнтів. Допустимо, що
всі коефіцієнти, крім
![]() ,
дорівнюють нулю. Тоді
,
дорівнюють нулю. Тоді
![]() ;
;
![]() . (7.41)
. (7.41)
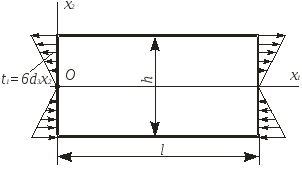
У
цьому випадку функція
![]() відповідає чистому згину пластини (рис.
7.5).
відповідає чистому згину пластини (рис.
7.5).
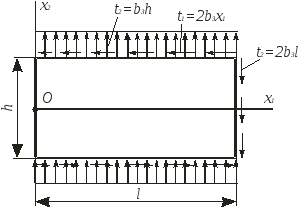
На
рис. 7.6 показано навантаження пластини,
яке відповідає функції
![]() .
Тоді маємо
.
Тоді маємо
![]() ;
;
![]() ;
;
![]() . (7.42)
. (7.42)
|
|
|
|
Рис. 7.5 Рис. 7.6 |
|
Виберемо функцію напружень у вигляді полінома четвертого степеня
![]() . (7.43)
. (7.43)
Підставивши (7.43) в (7.32), переконуємося, що це рівняння виконується якщо
![]() , (7.44)
, (7.44)
т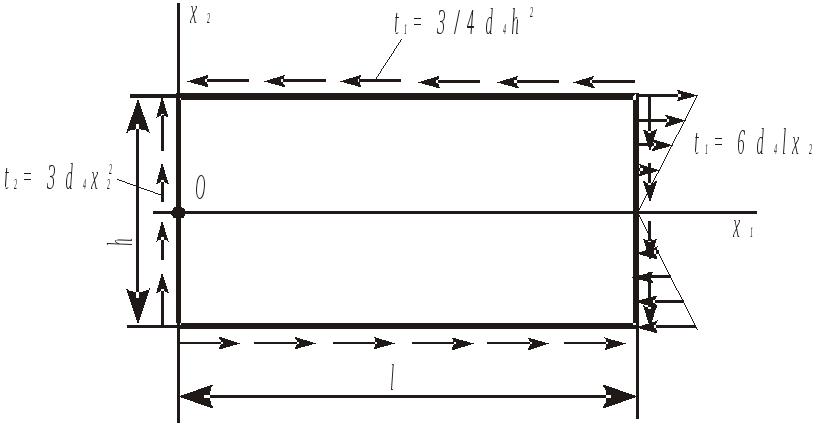 обто
в (7.43) довільно можна вибирати тільки
чотири коефіцієнти
обто
в (7.43) довільно можна вибирати тільки
чотири коефіцієнти
![]() ,
,
![]() ,
,
![]() і
і
![]() .
Надаючи їм різні значення, одержимо
відповідні навантаження на сторонах
.
Надаючи їм різні значення, одержимо
відповідні навантаження на сторонах
п
Рис
7.7![]() ,
,
![]() ,
тобто
,
тобто
![]() за формулами (7.30) знаходимо
за формулами (7.30) знаходимо
![]() ;
;![]()
![]() . (7.45)
. (7.45)
У
Рис. 7.7![]() діють рівномірно розподілені дотичні
напруження
діють рівномірно розподілені дотичні
напруження
![]() ;
на сторонах
;
на сторонах
![]() і
і
![]() розподілені за параболічним законом
дотичні зусилля
розподілені за параболічним законом
дотичні зусилля
![]() і крім цього, на стороні
і крім цього, на стороні
![]() діють нормальні зусилля
діють нормальні зусилля
![]() ,
які змінюються за лінійним законом.
,
які змінюються за лінійним законом.
При іншому виборі незалежних коефіцієнтів розглянутих поліномів одержимо інші випадки навантаження пластини. Лінійно комбінуючи ці елементарні розв’язки, одержимо нові розв’язки, які мають практичне значення.
РОЗДІЛ 8
ОСНОВИ ТЕОРІЇ ПРУЖНОСТІ
(ПЛОСКА ТЕОРІЯ ПРУЖНОСТІ В ПОЛЯРНИХ КООРДИНАТАХ)
Якщо пружне деформівне тіло займає плоску область, яка обмежена прямими і дугами кола, то в цьому випадку при розв’язуванні задач зручно користуватися полярною системою координат.
8.1. Основні рівняння плоскої теорії пружності
в полярних координатах
Розглянемо
поряд з прямокутною декартовою системою
координат
![]() полярну систему координат
полярну систему координат
![]() полюс якої співпадає з точкою
полюс якої співпадає з точкою
![]() ,
а полярна вісь – з координатною віссю
,
а полярна вісь – з координатною віссю
![]() .
.
Зв’язок
між декартовими і полярними координатами
точки
![]() визначається залежностями
визначається залежностями
![]() ;
;
![]() ;
;
![]() (8.1)
(8.1)
або
![]() ;
;
![]() . (8.2)
. (8.2)
Позначимо
через
![]() ,
,
![]() ,
,
![]() компоненти тензора напружень в полярній
системі координат, а через
компоненти тензора напружень в полярній
системі координат, а через
![]() ,
,
![]() – компоненти вектора зміщення у вибраній
точці
– компоненти вектора зміщення у вибраній
точці
![]() тіла. Їх додатні напрямки показано на
рис. 8.1, 8.2. Із рис. 8.2 видно, що компоненти
вектора зміщення в декартовій і полярній
системах координат зв’язані залежностями
тіла. Їх додатні напрямки показано на
рис. 8.1, 8.2. Із рис. 8.2 видно, що компоненти
вектора зміщення в декартовій і полярній
системах координат зв’язані залежностями
![]() ;
;
![]() (8.3)
(8.3)
або
![]() ;
;
![]() , (8.4)
, (8.4)
де
![]() .
.
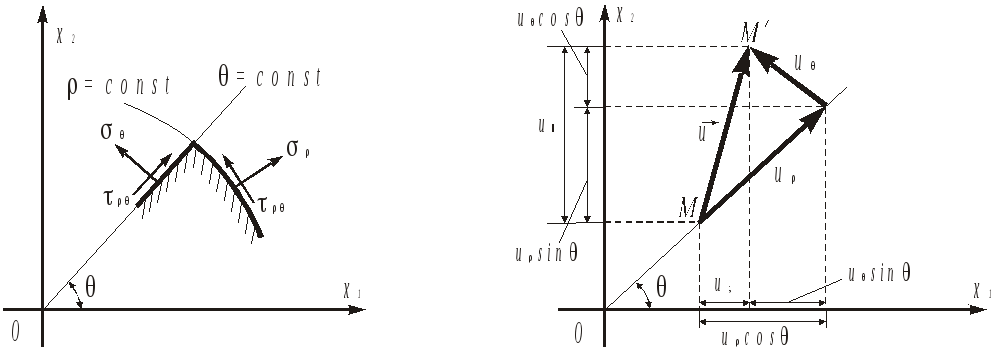
Рис. 8.1 Рис. 8.2
Д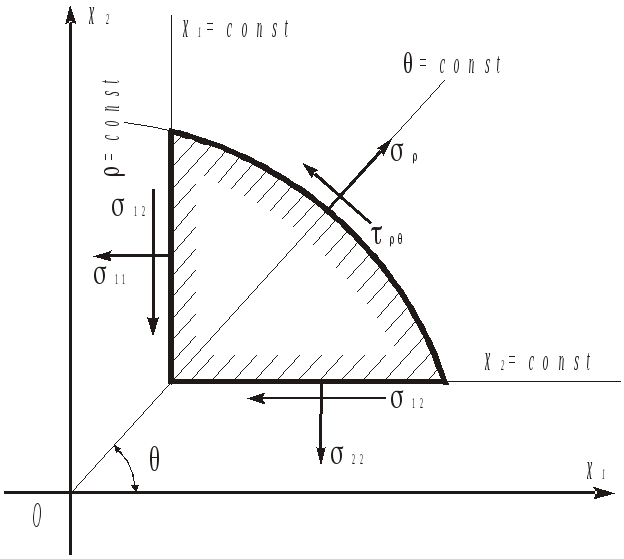 ля
встановлення зв’язку між компонентами
тензора напружень розглянемо елемент,
виділений координатними лініями
ля
встановлення зв’язку між компонентами
тензора напружень розглянемо елемент,
виділений координатними лініями
![]() ,
,
![]() ,
,
![]()
(рис. 8.3).
З
Рис. 8.3![]() і
і
![]()
![]() ;
;
![]() . (8.5)
. (8.5)
Тут
![]() – довжина криволінійного перерізу,
– довжина криволінійного перерізу,
![]() ,
,
![]() – довжини перерізів, паралельних осям
– довжини перерізів, паралельних осям
![]() ,
,
![]() відповідно. Враховуючи, що
відповідно. Враховуючи, що
![]() ,
,
![]() ,
із (8.5) знаходимо
,
із (8.5) знаходимо
![]() ;
;
![]() . (8.6)
. (8.6)
Формулу
для визначення
![]() одержимо із першої рівності (8.6) заміною
одержимо із першої рівності (8.6) заміною
![]() на
на
![]()
![]() . (8.7)
. (8.7)
На
підставі (8.6), (8.7) формули переходу від
компонент
![]() ,
,
![]() ,
,
![]() до компонент
до компонент
![]() ,
,
![]() ,
,
![]() запишуться у вигляді
запишуться у вигляді
![]() ;
;
![]() ;
;
![]() . (8.8)
. (8.8)
Якщо
(8.8) розв’язати відносно
![]() ,
,
![]() ,
,
![]() ,
то одержимо формули оберненого переходу
,
то одержимо формули оберненого переходу
![]() ;
;
![]() ;
;
Рис. 8.4![]() . (8.9)
. (8.9)
Додаючи два перші співвідношення (8.8) або (8.9), знаходимо
![]() . (8.10)
. (8.10)
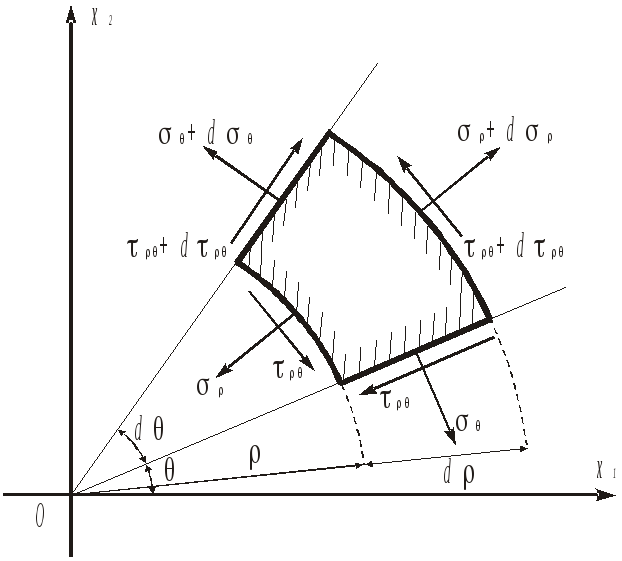
Для встановлення диференціальних рівнянь рівноваги в полярних координатах розглянемо елемент, який виділений двома парами координатних ліній (рис. 8.4).
Під
дією збіжної системи сил, зображених
на рис. 8.4, даний елемент повинен перебувати
у рівновазі. Записуючи умови рівноваги
в проекціях на напрямки
![]() і
і
![]() ,
одержимо при відсутності масових сил
,
одержимо при відсутності масових сил
![]()
![]() ;
;
![]()
![]() . (8.11)
. (8.11)
Враховуючи
в (8.11), що
![]() ,
,
![]() ,
і нехтуючи величинами третього порядку
малості, знаходимо після ділення на
,
і нехтуючи величинами третього порядку
малості, знаходимо після ділення на
![]() диференціальні рівняння рівноваги
диференціальні рівняння рівноваги
![]() ;
;
![]() . (8.12)
. (8.12)
Граничні умови на підставі (7.28) запишуться у вигляді
![]() ;
;
![]() при
при
![]() ;
;
![]() ;
;
![]() при
при
![]() , (8.13)
, (8.13)
де
![]() ,
,
![]() – нормальні складові контурного
навантаження;
– нормальні складові контурного
навантаження;
![]() – дотична складова.
– дотична складова.