

4.2. Тензор напружень
Розглянемо
деяку точку
![]() деформівного тіла і довільну площадку,
яка проходить через цю точку. Положення
площадки визначається вектором зовнішньої
нормалі
деформівного тіла і довільну площадку,
яка проходить через цю точку. Положення
площадки визначається вектором зовнішньої
нормалі
![]() .
.
Початок
координатних осей сумістимо з точкою
![]() ,
в околі якої виділимо елементарний
тетраедр (рис. 4.2), три грані якого
проходять через точку
,
в околі якої виділимо елементарний
тетраедр (рис. 4.2), три грані якого
проходять через точку
![]() і паралельні координатним площинам.
Четверта грань перпендикулярна до
вектора
і паралельні координатним площинам.
Четверта грань перпендикулярна до
вектора
![]() .
Площі координатних площадок визначаються
формулами
.
Площі координатних площадок визначаються
формулами
![]() , (4.5)
, (4.5)
де
![]() – компоненти одиничного вектора
– компоненти одиничного вектора
![]() ;
;
![]() – площа грані, яка перпендикулярна до
– площа грані, яка перпендикулярна до
![]() .
.
К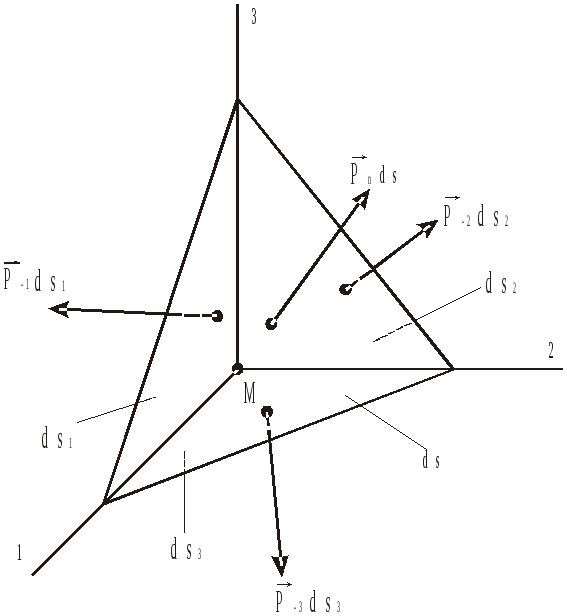 рім
поверхневих сил
рім
поверхневих сил
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
що діють на грані елемента, на нього діє
об’ємна сила
,
що діють на грані елемента, на нього діє
об’ємна сила
![]() .
Оскільки елемент, на який діють ці сили,
перебуває у рівновазі, то їх головний
вектор дорівнює нулю
.
Оскільки елемент, на який діють ці сили,
перебуває у рівновазі, то їх головний
вектор дорівнює нулю
![]()
![]() , (4.6)
, (4.6)
д
Рис.4.2.![]() ,
,
![]() – відстань від точки
– відстань від точки
![]() до площадки з нормаллю
до площадки з нормаллю
![]() .
.
З урахуванням (4.4) і (4.5) умову (4.6) запишемо у вигляді
![]() . (4.7)
. (4.7)
Якщо
тетраедр стягується в точку без зміни
напрямку
![]() ,
то величина
,
то величина
![]() і в співвідношенні (4.7) можна відкинути
доданок
і в співвідношенні (4.7) можна відкинути
доданок
![]() ,
тобто
,
тобто
![]() . (4.8)
. (4.8)
Таким
чином, вектор напруження
![]() на довільній площадці з нормаллю
на довільній площадці з нормаллю
![]() ,
яка проходить через точку
,
яка проходить через точку
![]() тіла, повністю визначається трьома
векторами напруження
тіла, повністю визначається трьома
векторами напруження
![]() на координатних площадках, що також
проходять через точку
на координатних площадках, що також
проходять через точку
![]() .
.
Вектори
![]() і
і
![]() розкладемо за базисними векторами
розкладемо за базисними векторами
![]() (
(![]() ):
):
![]() ;
;
![]() ;
;
![]() ; (4.9)
; (4.9)
![]() ,
,
де
![]() – компоненти вектора напруження на
довільній площадці з нормаллю
– компоненти вектора напруження на
довільній площадці з нормаллю
![]() ;
;
![]() – компоненти векторів напруження
– компоненти векторів напруження
![]() на координатних площадках.
на координатних площадках.
Підставляючи (4.9) в (4.8) і порівнюючи коефіцієнти при однакових базисних векторах, знаходимо
![]() ;
;
![]() ; (4.10)
; (4.10)
![]() .
.
Таким
чином напружений стан в заданій точці
![]() повністю задається величинами
повністю задається величинами
![]() ,
які визначаються в точці
,
які визначаються в точці
![]() .
.
На
підставі оберненої тензорної ознаки
дев’ять компонентів
![]() трьох векторів
трьох векторів
![]() є компонентами тензора другого рангу,
який називається тензором
напружень.
Його матриця має вигляд
є компонентами тензора другого рангу,
який називається тензором
напружень.
Його матриця має вигляд
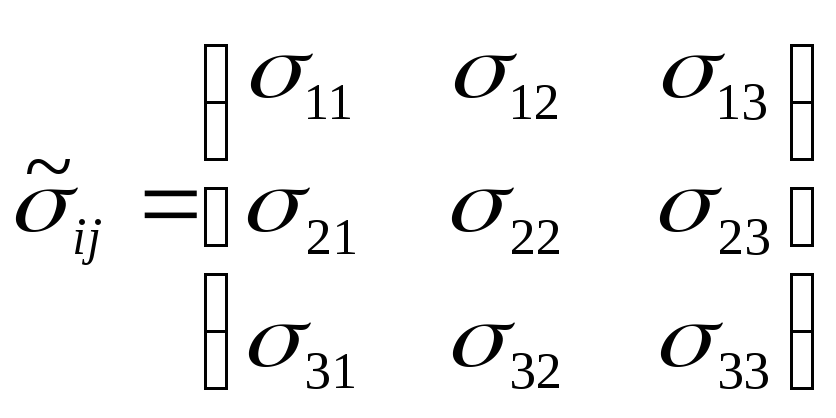 , (4.11)
, (4.11)
де
діагональні елементи
![]() ,
,
![]() ,
,
![]() – нормальні напруження на координатних
площадках, які називаються нормальними
компонентами тензора
– нормальні напруження на координатних
площадках, які називаються нормальними
компонентами тензора
![]() ,
а інші елементи матриці – дотичні
напруження на координатних площадках
або дотичні
компоненти тензора напружень.
,
а інші елементи матриці – дотичні
напруження на координатних площадках
або дотичні
компоненти тензора напружень.
П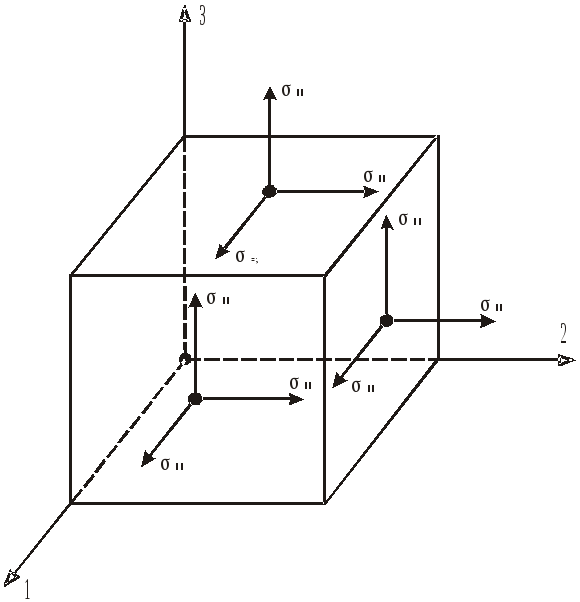 ерший
індекс у компонент
ерший
індекс у компонент
![]() тензора напружень відповідає індексу
осі
тензора напружень відповідає індексу
осі
![]() ,
яка перпендикулярна до координатної
площадки з вектором напруження
,
яка перпендикулярна до координатної
площадки з вектором напруження
![]() ,
другий індекс вказує напрямок компоненти
,
другий індекс вказує напрямок компоненти
![]() вздовж координатної осі
вздовж координатної осі
![]() (рис. 4.3).
(рис. 4.3).
З
Рис.
4.3![]() не залежать від вибору площадки, а
залежать тільки від вибору точки
не залежать від вибору площадки, а
залежать тільки від вибору точки
![]() .
.
![]()
4.3. Диференціальні рівняння рівноваги пружного тіла. Симетричність тензора напружень
Нехай
на деформівне тіло об’ємом
![]() ,
який обмежений поверхнею
,
який обмежений поверхнею
![]() ,
діють об’ємні і поверхневі сили, що
викликають малі зміщення його точок, а
отже, і малі деформації.
,
діють об’ємні і поверхневі сили, що
викликають малі зміщення його точок, а
отже, і малі деформації.
Деформівне
тіло, як єдине ціле, буде перебувати у
рівновазі, якщо головний вектор
![]() і головний момент
і головний момент
![]() об’ємних і поверхневих сил будуть
дорівнювати нулю. При рівновазі тіла
будь-яка, умовно виділена його частина,
також повинна перебувати у рівновазі
під дією сил, які до неї прикладені.
об’ємних і поверхневих сил будуть
дорівнювати нулю. При рівновазі тіла
будь-яка, умовно виділена його частина,
також повинна перебувати у рівновазі
під дією сил, які до неї прикладені.
Виділимо
умовно в об’ємі
![]() деякий інший об’єм
деякий інший об’єм
![]() ,
обмежений поверхнею
,
обмежений поверхнею
![]() ,
такий, щоб поверхні
,
такий, щоб поверхні
![]() і
і
![]() не перетиналися (рис. 4.4).
не перетиналися (рис. 4.4).
Р Рис.
4.4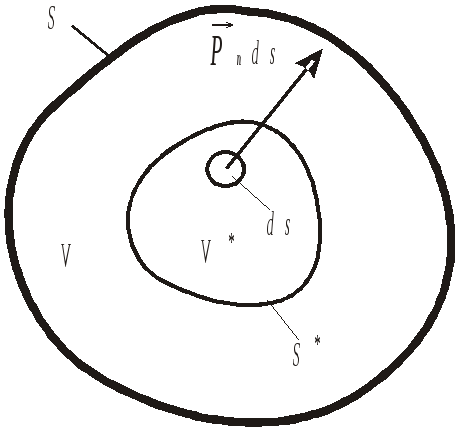
![]() елемент
елемент
![]() з нормаллю
з нормаллю
![]() ,
на який діє напруження
,
на який діє напруження
![]() .
Для об’єму
.
Для об’єму
![]() це напруження внутрішнє, а для
це напруження внутрішнє, а для
![]() – зовнішнє. Під дією поверхневих сил
– зовнішнє. Під дією поверхневих сил
![]() ,
а також об’ємних сил
,
а також об’ємних сил
![]() виділена частина об’ємом
виділена частина об’ємом
![]() перебуває
в рівновазі, тому на підставі (4.1), (4.2)
умови рівноваги запишуться у вигляді
перебуває
в рівновазі, тому на підставі (4.1), (4.2)
умови рівноваги запишуться у вигляді
![]() ;
;
![]() (4.12)
(4.12)
або
![]() ;
;
![]() . (4.13)
. (4.13)
Застосувавши до поверхневих інтегралів (4.13) формулу Гаусса-Остроградського
 ;
;
![]() ,
,
одержимо
 ; (4.14)
; (4.14)
 . (4.15)
. (4.15)
Умови
(4.14), (4.15) повинні виконуватися для
довільних об’ємів
![]() ,
а це можливо лише тоді, коли підінтегральні
функції дорівнюють нулю
,
а це можливо лише тоді, коли підінтегральні
функції дорівнюють нулю
 ;
;
![]() . (4.16)
. (4.16)
Перша умова рівноваги (4.16) з врахуванням (4.9) визначає систему трьох диференціальних рівнянь рівноваги тіла
![]() , (4.17)
, (4.17)
або в розгорнутому вигляді
![]() ;
;
![]() ;
;
![]() , (4.18)
, (4.18)
де
![]() .
.
У тензорному вигляді диференціальні рівняння рівноваги (4.18) записуються так
![]()
![]() . (4.19)
. (4.19)
Другу умову рівноваги (4.16) перетворимо до вигляду
або
 . (4.20)
. (4.20)
Другий доданок в (4.20) на підставі (4.16) дорівнює нулю, тому
 . (4.21)
. (4.21)
Враховуючи,
що
 ,
,
![]() ,
із (4.21) одержимо
,
із (4.21) одержимо
![]()
![]()
або
![]() . (4.22)
. (4.22)
Оскільки базисні вектори лінійно незалежні, то вирази в дужках повинні одночасно дорівнювати нулю, тобто
![]() . (4.23)
. (4.23)
Останні
співвідношення забезпечують симетричність
тензора напружень
![]() і виражають закон парності дотичних
напружень, згідно з яким тензор напружень
має шість незалежних компонент
і виражають закон парності дотичних
напружень, згідно з яким тензор напружень
має шість незалежних компонент
![]() .
Величини
.
Величини
![]() вважаються неперервними функціями
координат довільної точки тіла, включаючи
і точки його поверхні. Це означає, що
функції
вважаються неперервними функціями
координат довільної точки тіла, включаючи
і точки його поверхні. Це означає, що
функції
![]() ,
які задовольняють рівнянням рівноваги
(4.18), повинні задовольняти рівнянням
рівноваги елемента, виділеного в околі
довільної точки на поверхні.
,
які задовольняють рівнянням рівноваги
(4.18), повинні задовольняти рівнянням
рівноваги елемента, виділеного в околі
довільної точки на поверхні.
Розглянемо
тетраедр, умовно виділений в околі
деякої точки на поверхні
![]() тіла так, що три його грані паралельні
координатним площинам, а четверта грань
співпадала з поверхнею
тіла так, що три його грані паралельні
координатним площинам, а четверта грань
співпадала з поверхнею
![]() в заданій її точці. Тоді вектор
в заданій її точці. Тоді вектор
![]() буде співпадати з вектором
буде співпадати з вектором
![]() заданих поверхневих сил
заданих поверхневих сил
![]() .
.
З умов рівноваги тетраедра (4.10) одержимо
 (4.24)
(4.24)
Співвідношення (4.24), які зв’язують компоненти тензора напружень на поверхні тіла із компонентами зовнішнього поверхневого навантаження, називаються граничними умовами. У деяких випадках граничні умови визначаються заданими зміщеннями точок поверхні тіла.
При
рівновазі деформованого тіла в кожній
його точці шість незалежних компонент
симетричного тензора напружень
![]() повинні задовольняти трьом диференціальним
рівнянням рівноваги (4.18), а на поверхні
тіла – граничним умовам (4.24).
повинні задовольняти трьом диференціальним
рівнянням рівноваги (4.18), а на поверхні
тіла – граничним умовам (4.24).
Очевидно, що система трьох рівнянь (4.24), яка містить шість невідомих, має неоднозначний розв’язок, тобто задача визначення дійсного напруженого стану, викликаного заданими зовнішніми силами, статично невизначена.