Сложение параллельных сил. Центр тяжести
Рассмотрим простой случай. Пусть на
стержень действуют параллельные силы
F1; F2;
…; Fn,
направленные перпендикулярно стержню.
Найдем их равнодействующую.
Найти равнодействующую означает, что надо найти силу, под действием которой тело двигалось бы так же, как оно движется под действием реально действующих сил. При этом надо найти как саму равнодействующую силу, так и точку ее приложения. Пусть равнодействующая равна Fp и приложена в точке О. Если сила Fp заменяет все исходные силы, то значит сила –Fp полностью их компенсирует. Это означает, что если мы в точке О к стержню приложим еще силу –Fp, то стержень будет находиться в равновесии.
Запишем первое условие равновесия:

Направим ось Х вдоль стержня. Пусть х1; х2; …; хn – координаты точек приложения сил, а х0 – координата точки О. Тогда второе условие равновесия относительно начала координат запишется так:

Отсюда:

В последнем уравнении обе суммы алгебраические. Сила Fp, приложенная в точке с координатой х0, является равнодействующей исходных сил.
Рассмотрим теперь систему материальных точек. Пусть массы точек равны m1; m2; m3; … На каждую точку действует сила тяжести m1g; m2g; m3g; … Каждая из этих сил тяжести направлена к центру Земли. Если размеры системы малы по сравнению с радиусом Земли, то поле тяжести можно считать однородным, а силы тяжести, действующие на точки системы параллельными и направленными вертикально вниз. Найдем точку приложения равнодействующей всех этих сил тяжести. Проведем ось Х, направленную горизонтально. Пусть х1; х2; х3; … - координаты точек системы. Тогда для координаты точки приложения равнодействующей имеем:

Полученная формула совпадает с формулой для координаты центра масс системы тел.
Точка приложения равнодействующей всех сил тяжести системы материальных точек называется центром тяжести. В однородном поле тяготения центр тяжести системы материальных точек совпадает с ее центром масс. Аналогичную формулу можно написать для координаты Y центра тяжести:

Центр тяжести и центр масс имеется и у любого твердого тела. Причем у тел простой формы можно сразу указать положение центра тяжести, пользуясь соображениям симметрии. Так если однородное тело имеет ось симметрии, то центр тяжести находится на ней. Если тело имеет две пересекающиеся оси симметрии, то центр тяжести находится в точке их пересечения. Центр тяжести всех однородных фигур, имеющих геометрический центр, находится в этом центре. Если тело сложной формы можно разбить на составные части более простой формы, у которых известно нахождение центра тяжести, то положение центра тяжести всего тела можно определить так: тело заменяется системой материальных точек, находящихся в центрах тяжести соответствующих частей и имеющих массы, равные массе соответствующей части. Затем общий центр тяжести определяется по формулам нахождения координат центра тяжести системы материальных точек.
Виды положений равновесия. Устойчивость тел
Положения равновесия бывают трех типов:
устойчивые, неустойчивые и безразличные.
Рассмотрим пример трех положений
равновесия шарика, приведенный на
рисунке. Если в первом положении (шарик
в ямке) мы выведем шарик из положения
равновесия, сместив его в сторону, то
появляется так называемая скатывающая
сила (как на наклонной плоскости),
направленная в сторону положения
равновесия. Если шарик отпустить, то
эта сила обратно вернет его в положение
равновесия. Такое положение равновесия
называется устойчивым. Во втором
положении (шарик на горке) при отклонении
шарика в сторону также появляется
скатывающая сила, но она направлена в
сторону от начального положения и, если
шарик отпустить, то он скатится с горки.
Такое положение равновесия называется
неустойчивым. В третьем положении при
отклонении шарика от начального положения
никаких новых сил не возникает и если
шарик отпустить, то он останется в новом
положении. Такое положение равновесия
называется безразличным.
Дадим более строгое определение. Положение равновесия тела называется устойчивым, если при малом отклонении от положения равновесия возникают внешние силы, стремящиеся вернуть тело обратно в положение равновесия. Если же возникающие внешние силы стремятся увести тело еще дальше от положения равновесия, то такое положение равновесия называется неустойчивым. Если при отклонении тела никаких внешних сил не возникает, то положение равновесия безразличное.
Можно показать (и это хорошо видно на рисунке), что тип положения равновесия связан с характером изменения потенциальной энергии тела. Пусть тело находится в устойчивом положении равновесия. Это значит, что при отклонении тела в любую сторону от положения равновесия возникает сила, направленная к положению равновесия. При этом приходится совершить положительную работу против этой силы. Но работа внешней силы равна изменению потенциальной энергии тела. Значит, при отклонении тела от устойчивого положения равновесия потенциальная энергия тела увеличивается. То есть в устойчивом положении равновесия потенциальная энергия тела имеет минимум. Аналогично можно показать, что в неустойчивом положении равновесия потенциальная энергия тела имеет максимум. В безразличном положении равновесия потенциальная энергия постоянна.
Если у тела имеется устойчивое положение равновесия, то предоставленное самому себе, тело стремится в это положение равновесия, то есть стремится к минимуму потенциальной энергии. Это справедливо для любой системы тел. Можно сформулировать следующее положение: любая система тел, предоставленная самой себе, стремится занять положение, обладающее минимумом потенциальной энергии.
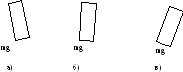
Рассмотрим устойчивость положения тела
на горизонтальной или наклонной
поверхности. Положим кирпич узким
основанием на доску и начнем медленно
приподнимать один конец доски. На рисунке
представлены три варианта положения
кирпича на доске. Интуитивно понятно,
что в случае а) кирпич будет устойчиво
лежать на доске, а в случае б) обязательно
опрокинется. Это связано с тем, что в
случае а) линия действия силы тяжести
пересекает поверхность внутри площади
опоры, а в случае б) вне площади опоры.
В случае а) момент силы тяжести относительно
крайней правой точки площади опоры
направлен против часовой стрелки, а,
значит, прижимает кирпич к поверхности,
а в случае б) этот момент направлен по
часовой стрелке, а, значит, опрокидывает
кирпич. В случае с) линия действия силы
тяжести проходит точно через границу
площади опоры, а, значит, кирпич находится
в состоянии неустойчивого равновесия.
Аналогично рассматривается вопрос об
устойчивости положения тел на
горизонтальной поверхности. Этот вопрос
может стоять при рассмотрении устойчивости
наклонных тел (например, Пизанской
башни) или тел неправильной формы
(например, подъемного крана). В любом
случае, для того, чтобы положение тела
было устойчивым необходимо, чтобы линия
действия силы тяжести пересекала
поверхность внутри площади опоры.