

7.2 Автоматическая стабилизация скорости полёта самолёта
Стабилизация индикаторной воздушной скорости нужна в режиме набора высоты и снижения для поддержания оптимального с точки зрения расхода топлива и ресурса режима работы двигателей, выдерживания заданного профиля полёта в вертикальной плоскости и необходимой скорости при заходе на посадку. Стабилизируется обычно приборная скорость или число Маха.
Автоматическая стабилизация приборной скорости осуществляется различным способом: включением режима «скорость» и режима «автомат тяги»
Режим «скорость» обеспечивает стабилизацию приборной скорости с помощью отклонения руля высоты при наборе и снижении. Включается режим кнопкой «скорость» на пульте САУ (Рис. 6.3) или FLS (рис. 7.1) после установки режима двигателя, необходимой вертикальной скорости и включения режима АП. При этом стабилизация скорости будет осуществляться путем автоматического отклонения РВ под действием основного управляющего сигнала:
![]()
 .
.
![]() формируется
в СВС,
формируется
в СВС,
![]() задается с пульта управления (ПУ), Vтек
– текущее значение скорости поступает
из системы воздушных сигналов. Закон
управления формируется в вычислителе
САУ в виде
задается с пульта управления (ПУ), Vтек
– текущее значение скорости поступает
из системы воздушных сигналов. Закон
управления формируется в вычислителе
САУ в виде
![]()
![]() -
угол крена;
-
угол крена;
![]() - угол тангажа;
- угол тангажа;
![]() - скорость;
- скорость;
![]() - продольное ускорение;
- продольное ускорение;
 .
.
Сигнал
![]() поступает из блока датчика линейного
ускорения или инерциальной системы для
демпфирования колебаний скорости, а
сигналы крена и тангажа поступают от
3-х малогабаритных гировертикалей –
МГВ или также из инерциальной систеиы.
Выбирающий элемент пропускает среднее
значение.
поступает из блока датчика линейного
ускорения или инерциальной системы для
демпфирования колебаний скорости, а
сигналы крена и тангажа поступают от
3-х малогабаритных гировертикалей –
МГВ или также из инерциальной систеиы.
Выбирающий элемент пропускает среднее
значение.
Режим FLS предусматривает стабилизацию установленной приборной скорости при наборе и снижении с автоматическим перехватом заданной высоты.
Рис.7.1 Пульт управления САУ в составе ПНК GARMIN 1000
Режим автомата тяги удобно использовать при заходе на посадку, когда меняется конфигурация самолета, а также при движении по глиссаде, когда управлять скоростью рулем высоты нельзя. Кроме того, этот режим необходим при автоматическом уходе на второй круг. В этом режиме скорость регулируется путем изменения тяги двигателя.
Основным сигналом для управления является сигнал разности между заданной и текущей скоростью ΔV = Vзад - Vтек.
Заданная
скорость устанавливается пилотом на
ПУЛ переключателем «Заданная скорость».
Режим включается кнопкой «Автомат
тяги». Дополнительно к сигналу ΔV
используется сигнал из малогабаритной
вертикали – МГВ, а также сигнал
![]() – продольной перегрузки.
– продольной перегрузки.
Управляющий сигнал привода сектора газа формируется вычислителем автомата тяги по следующему закону управления:

Структурная схема дана на рис.7.2
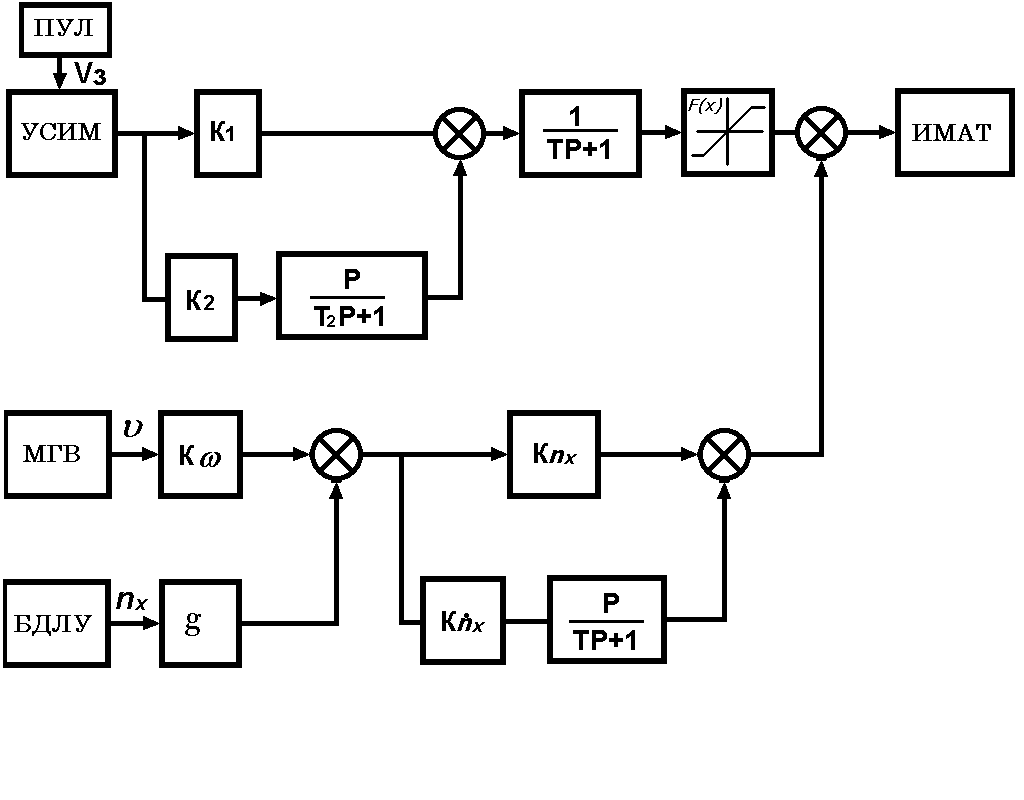
Рис. 7.2 Структурная схема САУ в режиме «Автомат тяги»

Рис. 7.3 Задатчик и индикатор заданной скорости
При нажатии кнопки на штурвале при уходе на второй круг автомат тяги автоматически перемещает РУД в положение взлётного режима двигателя, а руль высоты автоматически перемещается, устанавливая заданный угол тангажа для набора высоты. При этом скорость автоматически ограничивается до значения, соответствующего текущей конфигурации самолёта.
Лекция 8