

Теория автоматического управления
Курс лекций

Кропивницкий 2016
Лекция 1
Принципы автоматического управления
1 Основные задачи авиационной автоматики
Автоматикой называется область науки и техники, изучающая принципы действия и построения систем автоматического управления (САУ) различными объектами и производственными процессами.
Автомат - от греческого "автоматос" - движущийся сам собой. Появление и развитие автоматики связано со стремлением человека избавиться от тяжелого и утомительного физического труда, а также облегчить некоторые процессы умственной деятельности. В дальнейшем внедрение средств автоматики направлено на повышение производительности труда и улучшение качества продукции.
Автоматизация полёта самолёта преследует следующие цели:
- повышение безопасности полётов, которое обусловлено тем, что автоматическая система при правильной эксплуатации управляет самолётом лучше: точнее, быстрее реагирует и компенсирует внешнее возмущение, способна оптимизировать движение самолёта и, в отличие от человека, может выполнять несколько действий по управлению одновременно;
- повышение устойчивости и управляемости самолета, улучшение лётно–технических характеристик самолёта: повышение аэродинамического качества самолёта, маневренности, управляемости, снижение расхода топлива и таким образом экономичности при его эксплуатации;
- снятие однообразных, утомительных действий пилота, например, выдерживание в штурвальном режиме прямолинейного полёта с креном равным нулю в течение длительного времени. Впрочем, это облегчение для пилота компенсируется требованием углублённых знаний работы пилотажно-навигационного комплекса для качественного контроля над работой оборудования и квалифицированных действий в нестандартных ситуациях.
В современном самолете имеется большое количество простых и сложных автоматических устройств различного назначения. К сравнительно простым относятся следующие устройства:
-
автоматическая сигнализация – это сигнализация, например, о превышении температуры над допустимым уровнем, остатка топлива ниже допустимого уровня, световая сигнализация о выпущенном или убранном положении стоек шасси и др.;
-
автоматический контроль режимов полета, работы двигателя, других систем и агрегатов;
-
автоматическая защита – служит для предохранения устройств от вредных последствий (коротких замыканий, различных перегрузок, неисправностей);
-
автоматическая блокировка – предназначена для исключения возможности совершения неправильных действий, например, исключить возможность уборки шасси при нахождении самолета на земле;
-
дистанционное управление – управление механизмами на расстоянии (выпуск и уборка шасси, закрылков, отклонение рулей).
Более сложными автоматическими устройствами являются:
-
системы автоматического регулирования (САР);
-
системы автоматического управления (САУ).
Системы автоматического регулирования - это совокупность элементов, обеспечивающих без участия человека изменение в определенной последовательности какого-либо параметра (температуры, скорости, давления, курса, высоты, напряжения и т.п.).
Система автоматического управления - это совокупность элементов, обеспечивающих без участия человека протекание в определенной последовательности каких либо процессов. САУ может включать в себя несколько САР.
Несмотря на большое разнообразие автоматических систем, существует несколько принципов их создания и работы. С точки зрения принципа работы, условно автоматические системы подразделяются на:
-
Замкнутые;
-
Разомкнутые;
-
Самонастраивающиеся.
Замкнутые системы автоматического регулирования
В замкнутой системе автоматического регулирования в каждый момент времени сравнивается заданное значение регулируемой величины с текущим значением. Разница между ними (отклонение) после усиления по мощности поступает на исполнительное устройство, которое воздействует на исполнительный орган объекта регулирования таким образом, чтобы отклонение уменьшалось. Схема такого устройства показана на рис.1.1
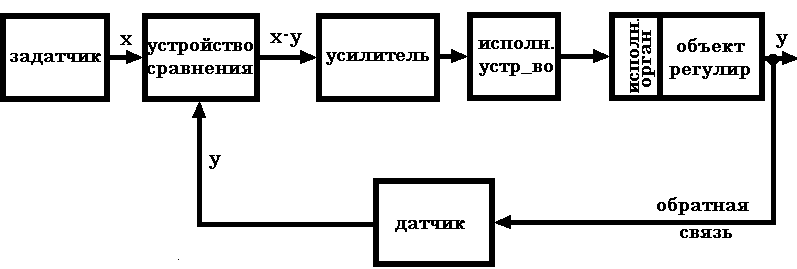
Рис.1.1
Принципы действия замкнутой САР и закономерности процесса регулирования рассмотрим на примере перехода от ручного управления курсом самолета к автоматическому управлению.
При ручном управлении заданное значение курса ψз заранее известно и его необходимо выдерживать. Во время полета под действием возмущающих сил и моментов самолет отклоняется от заданного курса. Чтобы иметь возможность вмешиваться в процесс полета, пилот должен иметь сведения о фактическом курсе ψ, затем сравнить его с заданным ψз. В зависимости от разницы между ними (ψз-ψ), учитывая ее величину и знак, пилот воздействует на рулевые органы с помощью штурвала и возвращает самолет на заданный курс.
Функциональная схема стабилизации курса в рассмотренном случае, которая раскрывает состав и назначение элементов в системе и их взаимодействие, имеет вид, показанный на рис. 1.2.
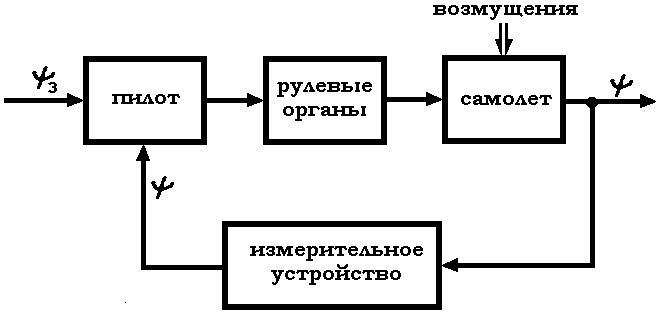
Рис. 1.2. Функциональная схема стабилизации курса самолета
Зная действия человека, его можно заменить устройством, выполняющим эти действия. Этим устройством в самолете является автопилот. Функциональная схема канала курса автопилота упрощенно выглядит так, как показано на рис. 1.3.
Схема содержит задающее устройство 3, вырабатывающее напряжение Uψз, пропорциональное заданному значению регулируемой величины, датчика Д, измеряющего значение регулируемой величины и преобразующего ее в напряжение Uψ, удобное для сравнения в УС, усилителя мощности У, исполнительного устройства ИУ и объекта регулирования ОР с регулирующим органом РО.
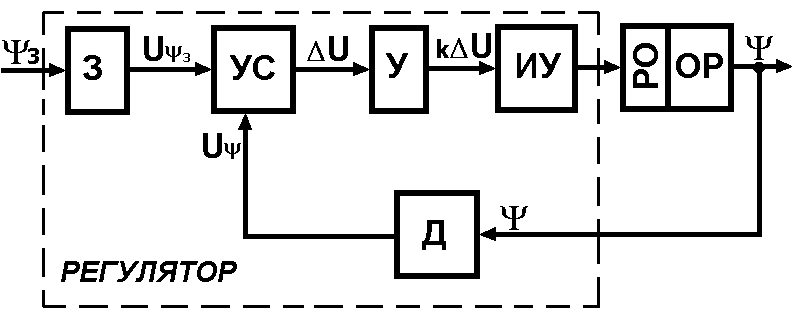
Рис. 1.3. Функциональная схема автоматической стабилизации курса
Действительное значение регулируемой величины ψ по каналу обратной связи подается через датчик в устройство сравнения для измерения отклонения его от заданного значения регулируемой величины. Напряжение, пропорциональное отклонению после усилителя поступает на исполнительное устройство (серводвигатель), который воздействует на регулирующий орган объекта регулирования.
Такие системы называются замкнутыми. Характерной особенностью замкнутой системы является наличие обратной связи.
В зависимости от характера изменения во времени заданного значения регулируемой величины (обозначается X) системы автоматического регулирования замкнутого типа подразделяются на:
- системы стабилизации, когда заданное значение регулируемой величины постоянно: X = Const. Например, системы стабилизации температуры, скорости вращения, напряжения, высоты полета;
-
следящие системы, в них заданное значение X изменяется по произвольному, случайному закону X = f(t). Например, движение антенны автоматического радиокомпаса;
-
системы программного регулирования обеспечивают изменение регулируемой величины по определенной заранее заданной программе. Например, система регулирования давления воздуха в герметичной кабине изменяет давление в кабине в зависимости от высоты полета по определенному закону.