

1.5 Обосновать выбор средств для измерения параметров.
Микропроцессорный программируемый контроллер диспетчеризации Микродат работает с электрическими сигналами, поэтому необходимо выбирать приборы с унифицированными токовыми выходными сигналами (Сапфир)
По заданию в системе управления устанавливаются регулирующие органы с пневматическими исполнительными механизмами, а управляющие сигналы электрические, поэтому следует предусмотреть электропневмопреобразователи, которые преобразуют электрический сигнал в пневматический,
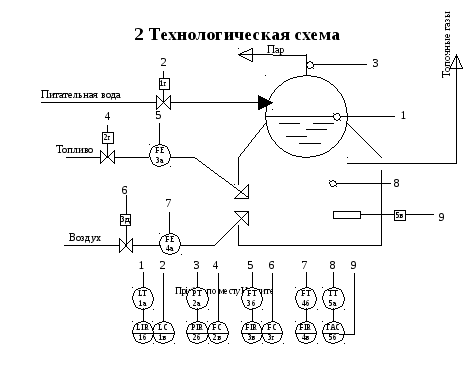
3 Спецификация
|
Наименование или позиция технологического аппарата |
Контролируемый, сигнализируемый или регулируемый параметр |
Номер позиции средств автоматизации |
Тип, марка средств автоматизации, краткая техническая характеристика |
Примечание |
|
Трубопроводы подачи газообразного топлива и воздуха, и питательной воды
|
Контроль и регулирование соотношения расходов |
1-1 |
Диафрагма камерная ДК6-50. Условный проход 50 мм. Условное давление 0,6 МПа (6 кгс/см2 |
|
|
1-2 |
Преобразователь разности давления типа «Сапфир-22ДД» класс точности 0,5. Предел измерения (0…1250) кг/ч |
Преобразует перепал давления в унифицированный токовый сигнал (0…5)мА |
||
|
2-1 |
Диафрагма камерная ДК6-50 |
|
||
|
2-2 |
Преобразователь разности давления типа «сапфир-22ДД» класс точности 0,5. Предел измерения (0…1250) кг/ч |
Преобразует перепад давления в унифицированный электрический сигнал (0…5)мА |
||
|
2-3 |
Электропневмопреобразователь типа ЭПП-63, оснащенный станцией управления |
Преобразует унифицированный электрический сигнал (0…5)мА в унифицированный пневмосигнал (0,02-0,1) мПа |
||
|
Трубопроводы подачи газообразного топлива и воздуха, и питательной воды
|
Контроль и регулирование соотношения расходов |
2-4 |
Регулирующий клапан с мембранным исполнительным механизмом25с48НЖ |
НО |
|
7-1 |
Диафрагма камерная ДК6-50 |
|
||
|
7-2 |
Преобразователь разности давления типа «сапфир-22ДД». Класс точности-0,5. Предел измерения (0…1250)кг/ч |
Преобразует перепад давления в унифицированный токовый сигнал (0…5)мА |
||
|
Котел |
Контроль и регулирование уровня |
3-1 |
Уровнемер буйковый с унифицированным электросигналом (0…5)мА, класс точности 1, предел измерения (0…4000)мм (САПФИР-22ДУ) |
|
|
3-2 |
Электропневмопреобразователь Типа ЭПП-63 |
Преобразует унифицированный электрический сигнал (0…5)мА в унифицированный пневмосигнал (0,02-0,1) мПа |
||
|
Котел |
Контроль и регулирование уровня |
3-3 |
Регулирующий клапан с мембранным исполнительным механизмом25с48НЖ |
НО |
|
На выходе из котла |
Контроль и регулирование избыточного давления и контроль по температуре пара |
4-1 |
Измерительный преобразователь с унифицированным токовым выходным сигналом (0…5)мА типа «САПФИР22ДИ» модели 2110, класс точности 0,5 предел измерения (0…0,6)мПа |
|
|
4-2 |
Электропневмопреобразователь типа ЭПП-63 |
Преобразует унифицированный электрический сигнал (0…5)мА в унифицированный пневмосигнал (0,02-0,1) мПа |
||
|
4-3 |
Регулирующий клапан с мембранным исполнительным механизмом25с48НЖ |
НЗ |
||
|
6-1 |
Термоэлектрический преобразователь ТХИ-0515, редел измерения 0-600 С |
Электроды хромель-копель |
||
|
|
|
6-2 |
Нормирующий токовый преобразователь Ш-700 |
Преобразует электросигнал в унифицированный сигнал (0..6)мА |
|
На входе из печи |
Контроль и регулирование давления разряжения |
5-1 |
Измерительный преобразователь с унифицированным токовым выходным сигналом (0…5)мА типа «САПФИР22ДВ» модели 2110, класс точности 0,5 предел измерения (0…0,5)кПа |
|
|
5-2 |
Электропневмопреобразователь типа ЭПП-63 |
Преобразует унифицированный электрический сигнал (0…5)мА в унифицированный пневмосигнал (0,02-0,1) мПа |
||
|
5-3 |
Регулирующий клапан с мембранным исполнительным механизмом 25с48НЖ |
НЗ |
2. Расчетная часть. Исследовать АСР 3-го порядка
2.1 Уравнение динамических характеристик объекта регулирования (ОР) и автоматического регулирования (АР) в общем виде и с заданными коэффициентами (Тоб, Коб, Кр, Ти)
ОР:
![]()
![]()
![]()
![]()
АР:
![]()
![]()
1)
![]()
![]()
![]()
2)
![]()
![]()
![]()
2.2 Кривые разгона ОР и АР по заданным коэффициентам их характеристик
ОР:
![]()
![]() при
Z(t)=1(t)
при
Z(t)=1(t)
Уравнение кривой разгона ОР:
![]()
![]()
![]()
![]()
Примем t по таблице, рассчитаем значения и по полученным данным построим график:
|
t |
0 |
5 |
10 |
20 |
30 |
40 |
50 |
60 |
|
y(t) |
0 |
0.08 |
1.09 |
1.52 |
1.69 |
1.75 |
1.78 |
1.79 |
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Кривая разгона одноемкостного статического объекта
АР:
![]()
При y(t)=1(t)
Уравнение кривой разгона АР (ПИ-регулятора)
![]()
1) Кр=5,7; Ти=2,15
![]()
2) Кр=1,5; Ти=2,15
![]()
Примем значение t согласно таблице и по полученным данным сторим кривую разгона по 2-м точкам:
|
t |
x(t) 1 |
x(t) 2 |
|
0 |
5.7 |
1.5 |
|
2.15 |
6.7 |
2.5 |
Кривая разгона ПИ-регулятора
Кривая разгона (переходная характеристика) – это характеристика элемента АСР при единичном скачкообразном изменении входного сигнала
2.3 Записать передаточные функции всех элементов АСР согласно задания
![]()
![]()
1) Кр=5,7 Ти=2,15
2) Кр=1,5 Ти=2,15
Киу=0,3
Объект регулирования (ОР):
![]()
Измерительный преобразователь (ИП)
![]()
ПИ – регулятор:
![]()
![]()
![]()
Исполнительное устройство (ИУ):
![]()
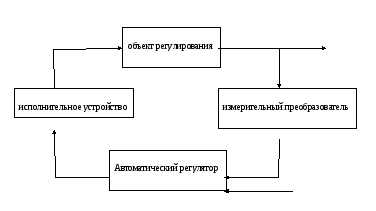
2.4 Структурная схема замкнутой АСР
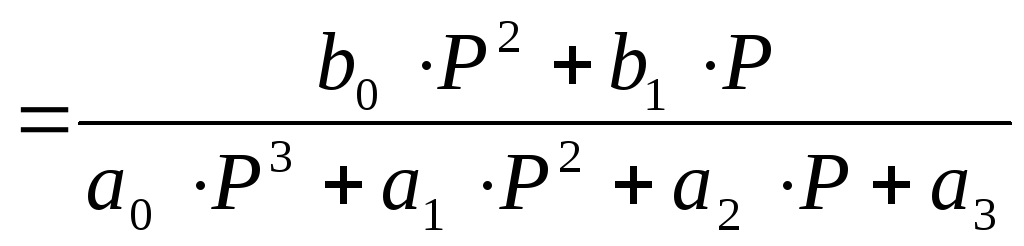
2.5 Выражение эквивалентной передаточной функции АСР Wэкв(Р) коэффициенты b0, b1, a0, a2, a3
![]()
![]()


![]()
![]()
По заданию
Т1=0; Т2=Тоб; К=1
![]()
![]()
![]()
![]()
1)
![]()
2)
![]()
![]()
![]()
![]()
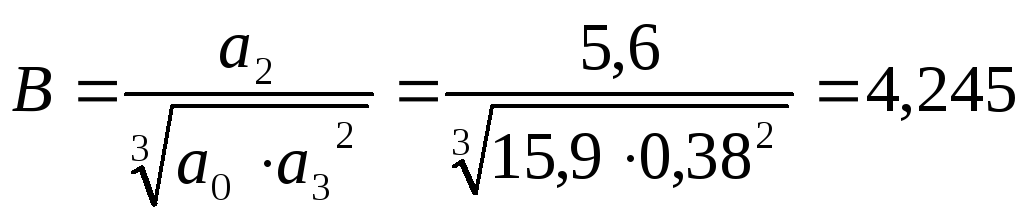
Коэффициенты Вышнеградского:

1)
2)
В результате расчета получаем значения регулируемого параметра в переходном процессе с шагом 1 при Ти=5.7
А=1.721, В=3.977, S0 = 0.469;
Р1 = -0,080; Р2 = -0,208; Р3 = 0,502
|
0.000 |
0.155 |
0.261 |
0.298 |
|
0.254 |
0.194 |
0.135 |
0.061 |
|
0.048 |
0.048 |
0.055 |
0.068 |
|
0.070 |
0.068 |
0.062 |
0.047 |
|
0.041 |
0.035 |
0.031 |
0.027 |
|
0.026 |
0.025 |
0.024 |
0.021 |
|
0.019 |
0.018 |
0.016 |
0.013 |
|
0.012 |
0.011 |
0.011 |
0.009 |
В результате расчета получаем значения регулируемого параметра в переходном процессе с шагом 1 при Ти=1.5
А=1.721, В=1.384, S0 = 0.469;
Р1 = -0,360; Р2 = -0,067 ; Р3 = 0,248
|
0.000 |
0.160 |
0.295 |
0.397 |
0.465 |
|
0.497 |
0.496 |
0.465 |
0.410 |
0.337 |
|
0.2533 |
0.165 |
0.077 |
-0.004 |
-0.075 |
|
-0.132 |
-0.174 |
-0.200 |
-0.210 |
-0.207 |
|
-0.191 |
-0.165 |
-0.133 |
-0.96 |
-0.058 |
|
-0.021 |
0.012 |
0.040 |
0.063 |
0.078 |
|
0.087 |
0.090 |
0.087 |
0.078 |
0.066 |
|
0,052 |
0.036 |
0.020 |
0.005 |
-0.009 |