

-
ЛОГІЧНІ ЕЛЕМЕНТИ ТТЛ/ТТЛШ: БАЗОВИЙ ЛОГІЧНИЙ ЕЛЕМЕНТ. АНАЛІЗ АМПЛІТУДНО-ПЕРЕДАТОЧНОЇ (АМПЛІТУДНОЇ АБО СТАТИЧНОЇ) ХАРАКТЕРИСТИКИ. СТАТИЧНІ ТА ДИНАМІЧНІ ПАРАМЕТРИ.
Логический элемент (вентиль) — это электронная схема, выполняющая некоторую простейшую логическую операцию. На рисунке приведены примеры условных графических обозначений некоторых логических элементов.
Логический элемент может быть реализован в виде отдельной интегральной схемы. Часто интегральная схема содержит несколько логических элементов.

Логические элементы используются в устройствах цифровой электроники для выполнения простого преобразования логических сигналов.
Наиболее широко используются следующие классы логических элементов: ТТЛ(транзисторно-транзисторная логика), ТТЛШ (транзисторно-транзисторная логика с диодами Шоттки), КМОП, ЭСЛ.
Базовый элемент ТТЛ содержит многоэмиттерный транзистор, выполняющий логическую операцию И, и сложный инвертор (рис. слева). Если на один или оба входа одновременно подан низкий уровень напряжения, то многоэмиттерный транзистор находится в состоянии насыщения и транзистор Т2 закрыт, а следовательно, закрыт и транзистор Т4, т. е. на выходе будет высокий уровень напряжения. Если на обоих входах одновременно действует высокий уровень напряжения, то транзистор Т2 открывается и входит в режим насыщения, что приводит к открытию и насыщению транзистора Т4 и запиранию транзистора Т3, т. е. реализуется функция И-НЕ.

Для увеличения быстродействия элементов ТТЛ используются транзисторы с диодами Шоттки (транзисторы Шоттки).
|
Базовый логический элемент ТТЛШ. В качестве базового элемента серии микросхем К555 использован элемент И-НЕ. На рис. 3.29,а изображена схема этого элемента, а условное графическое обозначение транзистора Шоттки приведено на рис. 3.29,6. Такой транзистор эквивалентен рассмотренной выше паре из обычного транзистора и диода Шоттки. Транзистор VT4 — обычный биполярный транзистор.
|
|

Е сли
оба входных напряжения Uвх1
и Uвх2
имеют высокий уровень, то диоды VD3 и
VD4 закрыты, транзисторы VT1, VT5 открыты и
на выходе имеет место напряжение низкого
уровня. Если хотя бы на одном входе
имеется напряжение низкого уровня, то
транзисторы VT1 и VT5 закрыты, а транзисторы
VT3 и VT4 открыты, и на входе имеет место
напряжение низкого уровня. Полезно
отметить, что транзисторы VT3 и VT4
образуют так называемый составной
транзистор (схему Дарлингтона).
сли
оба входных напряжения Uвх1
и Uвх2
имеют высокий уровень, то диоды VD3 и
VD4 закрыты, транзисторы VT1, VT5 открыты и
на выходе имеет место напряжение низкого
уровня. Если хотя бы на одном входе
имеется напряжение низкого уровня, то
транзисторы VT1 и VT5 закрыты, а транзисторы
VT3 и VT4 открыты, и на входе имеет место
напряжение низкого уровня. Полезно
отметить, что транзисторы VT3 и VT4
образуют так называемый составной
транзистор (схему Дарлингтона).
Амплітудно-передаточна характеристика.
При нулевом напряжении на входе элемента ТТЛ выходное напряжение соответствует высокому логическому уровню U1вых (точка А).
Увеличение входного напряжения до величины 1,1 В соответствует закрытому состоянию сложного инвертора и практически не изменяет напряжение на выходе элемента. При напряжении на входе более 1,1 В (точка В) начинает открываться транзистор VT2, а транзисторVT4 остается закрытым, т.к. его переход база-эмиттер шунтируется резистором R3. Увеличение тока через транзистор VT2 вызывает увеличение падения напряжения на резисторах R2 и R3. Выходное напряжение эмиттерного повторителя VT3 (т.е. выходное напряжение ТТЛ элемента) уменьшается с ростом падения напряжения на R2 (участок В-С).
Увеличение
падения напряжения на R3 до 0,5..0,6 В приводит
к открыванию транзистора VT4 (см. точку
С). Все транзисторы переходят в активный
режим. Малые изменения входного напряжения
(![]() Uвх)
вызывают значительное уменьшение
выходного напряжения (
Uвх)
вызывают значительное уменьшение
выходного напряжения (![]() Uвых).
На участке C-F логический элемент
работает как аналоговый усилитель с
коэффициентом усиления по напряжению:
Ku =
Uвых).
На участке C-F логический элемент
работает как аналоговый усилитель с
коэффициентом усиления по напряжению:
Ku =
![]() Uвых
/
Uвых
/
![]() Uвх.
Uвх.
Большинство реальных ТТЛ элементов имеют коэффициент усиления Ku в пределах от 5 до 20.
Правее точки F, когда увеличение входного напряжения приводит к насыщению транзисторов VT2 и VT4, дальнейшее изменение выходного напряжения происходить не может. Этот уровень выходного напряжения называется логическим нулем ТТЛ элементов и составляет : U0вых = 0,1...0,4 В. Точка D, лежащая на пересечении передаточной характеристики с биссектрисой первого квадранта (т.е. с прямой, на которой : Uвых = Uвх), определяет пороговый уровень напряжения Uпор (примерно 1,3..1,4 Вольта), разделяющий низкий и высокий логические уровни. Расстояния между низким логическим уровнем ТТЛ (U0 = 0,4 В) и пороговым напряжением (Uпор = 1,3 В), а также между высоким логическим уровнем ТТЛ (U1 > 3 В) и пороговым напряжением называются ЗАПАСОМ ПОМЕХОУСТОЙЧИВОСТИ. Этот запас определяет максимальное напряжение помехи на входе элемента, не изменяющее логическое состояние выхода.
Для ТТЛШ элементов характеристика имеет аналогичный характер за исключением того, что выходное напряжение логического нуля U0вых = 0,4..0,6 В, что является недостатком (следствие, уменьшенный на 0,2 Вольта запас помехоустойчивости).
Рассмотрим наиболее важные из параметров.
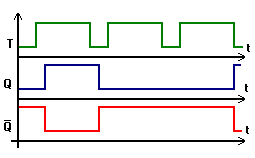
Б ыстродействие
характеризуют временем задержки
распространения сигнала tзр и максимальной
рабочей частотой Fмакс. Обратимся к
идеализированным временным диаграммам,
соответствующим элементу НЕ (инвертору)
(рис. 3.24). Через Uвх1 и Uвых1 обозначены
уровни входного и выходного напряжений,
соответствующие логической единице, а
через Uвх0 и Uвых0 — соответствующие
логическому нулю. Различают время
задержки tзр10 распространения при
переключении из состояния 1 в состояние
0 и при переключении из состояния 0 в
состояние 1 — tзр01,
а
также среднее
время задержки распространения tзр,
причем
ыстродействие
характеризуют временем задержки
распространения сигнала tзр и максимальной
рабочей частотой Fмакс. Обратимся к
идеализированным временным диаграммам,
соответствующим элементу НЕ (инвертору)
(рис. 3.24). Через Uвх1 и Uвых1 обозначены
уровни входного и выходного напряжений,
соответствующие логической единице, а
через Uвх0 и Uвых0 — соответствующие
логическому нулю. Различают время
задержки tзр10 распространения при
переключении из состояния 1 в состояние
0 и при переключении из состояния 0 в
состояние 1 — tзр01,
а
также среднее
время задержки распространения tзр,
причем
![]() Время
задержки принято определять по перепадам
уровней 0,5Uвх
и 0,5Uвых.
Максимальная рабочая
частота Fмакс
— это частота, при которой сохраняется
работоспособность схемы. Нагрузочная
способность характеризуется коэффициентом
объединения по входу Коб
и коэффициентом разветвления
по выходу Краз
(иногда используют термин «коэффициент
объединения по выходу»). Величина Коб
— это число
логических входов, величина Краз
— максимальное число
однотипных логических элементов, которые
могут быть подключены к выходу данного
логического элемента.
Типичные значения их таковы: Коб
= 2...8, Краз
= 4...10. Для
элементов с повышенной нагрузочной
способностью Краз
= 20...30.
Время
задержки принято определять по перепадам
уровней 0,5Uвх
и 0,5Uвых.
Максимальная рабочая
частота Fмакс
— это частота, при которой сохраняется
работоспособность схемы. Нагрузочная
способность характеризуется коэффициентом
объединения по входу Коб
и коэффициентом разветвления
по выходу Краз
(иногда используют термин «коэффициент
объединения по выходу»). Величина Коб
— это число
логических входов, величина Краз
— максимальное число
однотипных логических элементов, которые
могут быть подключены к выходу данного
логического элемента.
Типичные значения их таковы: Коб
= 2...8, Краз
= 4...10. Для
элементов с повышенной нагрузочной
способностью Краз
= 20...30.
Помехоустойчивость в статическом режиме характеризуют напряжением Uист, которое называют статической помехоустойчивостью. Это такое максимально допустимое напряжение статической помехи на входе, при котором еще не происходит изменение выходных уровней логического элемента.
Важным параметром является мощность, потребляемая микросхемой от источника питания. Если эта мощность различна для двух логических состояний, то часто указывают среднюю потребляемую мощность для этих состояний.
Важными являются также следующие параметры:
напряжение питания;
входные пороговые напряжения высокого и низкого уровня Uвх 1порог и Uвх 0порог, соответствующие изменению состояния логического элемента;
выходные напряжения высокого и низкого уровней Uвых1 и Uвых0
1.2 ЛОГІЧНІ ЕЛЕМЕНТИ З ТРЬОМА СТАНАМИ ВИХОДУ. ПРИНЦИП ДІЇ. ВПОРЯДКУВАННЯ РОБОТИ ДЕКІЛЬКОХ ЕЛЕМЕНТІВ НА ОДНУ СПІЛЬНУ ЛІНІЮ ІНТЕРФЕЙСУ (МАГІСТРАЛЬНІ ІНТЕРФЕЙСИ)
Ч асто
возникает необходимость подключения
выходов нескольких
цифровых микросхем к одной нагрузке.
Одним из
способов объединения выходов является
использование в
выходных каскадах микросхем транзисторов,
один из выводов
которых (коллектор, эмиттер, сток, исток)
никуда
не подключен. Такой вывод называют
открытым.
асто
возникает необходимость подключения
выходов нескольких
цифровых микросхем к одной нагрузке.
Одним из
способов объединения выходов является
использование в
выходных каскадах микросхем транзисторов,
один из выводов
которых (коллектор, эмиттер, сток, исток)
никуда
не подключен. Такой вывод называют
открытым.
Покажем схематически (рис. 3.25), как объединяются выходы микросхем с открытым коллектором. Такую схему называют «монтажным (проводным) ИЛИ».
Если
открытым является коллектор транзистора
п-р-п-типа,
эмиттер транзистора
р-п-р-типа,
сток транзистора
с каналом n-типа,
исток транзистора с каналом р-типа,
то вывод обозначают символом![]() .
Если открытым
является коллектор транзистора
p-n-р-типа,
эмиттер транзистора
n-р-n-типа,
сток транзистора с каналом р-типа,
исток транзистора с каналом n-типа,
вывод обозначают
символом
.
Если открытым
является коллектор транзистора
p-n-р-типа,
эмиттер транзистора
n-р-n-типа,
сток транзистора с каналом р-типа,
исток транзистора с каналом n-типа,
вывод обозначают
символом![]() .
.
Выходные
каскады некоторых микросхем могут
работать в таком
режиме, когда микросхема оказывается
фактически
отключенной от нагрузки. Это так
называемое третье
(высокоимпедансное) состояние микросхемы.
Использование третьего состояния
является еще одним способом
объединения выходов микросхем, который
широко
используется в вычислительной технике,
при подключении к
общей шине многих устройств. Приведем
фрагмент
схемы, поясняющей возникновение третьего
состояния
(рис. 3.26). Если оба транзистора закрыты,
то микросхема и
нагрузка фактически являются
разъединенными. Наличие третьего
состояния обозначают символом
![]()
П ри
использовании в едином цифровом
устройстве микросхем
различных серий, и в особенности различных
логик, может возникнуть
проблема согласования уровней входных
и выходных напряжений. Для указанных
целей производятся
специальные микросхемы, которые называют
преобразователями уровня сигналов.
ри
использовании в едином цифровом
устройстве микросхем
различных серий, и в особенности различных
логик, может возникнуть
проблема согласования уровней входных
и выходных напряжений. Для указанных
целей производятся
специальные микросхемы, которые называют
преобразователями уровня сигналов.
1.3 ЛОГІЧНІ ЕЛЕМЕНТИ МОП/КМОП: БАЗОВИЙ ЛОГІЧНИЙ ЕЛЕМЕНТ. АНАЛІЗ АМПЛІТУДНО-ПЕРЕДАТОЧНОЇ (АМПЛІТУДНОЇ АБО СТАТИЧНОЇ) ХАРАКТЕРИСТИКИ. СТАТИЧНІ ТА ДИНАМІЧНІ ПАРАМЕТРИ.
В микросхемах n-МОП и р-МОП используются ключи на МОП-транзисторах с n-каналом и динамической нагрузкой и на МОП-транзисторах с p-каналом.
Р ассмотрим
базовый элемент логики п-МОП,
реализующий функцию ИЛИ-НЕ (рис. 3.31). Он
состоит
из нагрузочного транзистора Т3
и двух управляющих
транзисторов Т1
и
Т2.
Если оба транзистора T1
и Т2
закрыты,
то на выходе устанавливается высокий
уровень напряжения.
Если одно или оба напряжения и1
и и2
имеют
высокий уровень, то открывается один
или оба транзистора
Т1
и
Т2
и на входе устанавливается низкий
уровень
напряжения, т. е. реализуется функция
ассмотрим
базовый элемент логики п-МОП,
реализующий функцию ИЛИ-НЕ (рис. 3.31). Он
состоит
из нагрузочного транзистора Т3
и двух управляющих
транзисторов Т1
и
Т2.
Если оба транзистора T1
и Т2
закрыты,
то на выходе устанавливается высокий
уровень напряжения.
Если одно или оба напряжения и1
и и2
имеют
высокий уровень, то открывается один
или оба транзистора
Т1
и
Т2
и на входе устанавливается низкий
уровень
напряжения, т. е. реализуется функция
![]()
Для исключения потребления мощности логическим элементом в статическом состоянии используются комплементарные МДП — логические элементы (КМДП или КМОП-логика). В микросхемах КМОП используются комплементарные ключи на МОП-транзисторах. Они отличаются высокой помехоустойчивостью. Логика КМОП является очень перспективной. Рассмотренный ранее комплементарный ключ фактически является элементом НЕ (инвертором).
Р ассмотрим
КМОП — логический элемент, реализующий
функцию ИЛИ-НЕ (рис. 3.32), Если входные
напряжения
имеют низкие уровни (и1
и
и2
меньше
порогового напряжения
«-МОП-транзистора Uзи
порогn),
то транзисторы
Т1
и
Т2
закрыты, транзисторы Т3
и Т4
открыты и выходное
напряжение имеет высокий уровень. Если
одно или
оба входных напряжения и1
и
и2
имеют
высокий уровень,
превышающий Uзи
порогn
,
то
открывается один или оба транзистора
Тх
и Т2,
а между истоком и затвором одного или
обоих транзисторов Т3
и Т4
устанавливается низкое напряжение,
что приводит к запиранию одного или
обоих
транзисторов Т3
и Т4,
а следовательно, на выходе устанавливается
низкое напряжение. Таким образом, этот
элемент
реализует функцию
ассмотрим
КМОП — логический элемент, реализующий
функцию ИЛИ-НЕ (рис. 3.32), Если входные
напряжения
имеют низкие уровни (и1
и
и2
меньше
порогового напряжения
«-МОП-транзистора Uзи
порогn),
то транзисторы
Т1
и
Т2
закрыты, транзисторы Т3
и Т4
открыты и выходное
напряжение имеет высокий уровень. Если
одно или
оба входных напряжения и1
и
и2
имеют
высокий уровень,
превышающий Uзи
порогn
,
то
открывается один или оба транзистора
Тх
и Т2,
а между истоком и затвором одного или
обоих транзисторов Т3
и Т4
устанавливается низкое напряжение,
что приводит к запиранию одного или
обоих
транзисторов Т3
и Т4,
а следовательно, на выходе устанавливается
низкое напряжение. Таким образом, этот
элемент
реализует функцию
![]() и
потребляет мощность
от источника питания лишь в короткие
промежутки
времени, когда происходит его переключение.
и
потребляет мощность
от источника питания лишь в короткие
промежутки
времени, когда происходит его переключение.
|
|
|
|
n-МОП |
КМОП |


При нулевом входном напряжении (Uвх = 0) канал имеет очень большое сопротивление и на выход ключа подается напряжение питания через резистор R. Выходное напряжение логической единицы (U1вых) равно напряжению питания +Е. При увеличении входного напряжения выше U' сопротивление канала постепенно уменьшается и на выход подается часть напряженияисточника питания с делителя, образованного сопротивлением канала и резистором R (участок А-В на рис. слева). Сопротивление канала не может уменьшится до нуля. При входном напряжении выше U" сопротивление канала достигает минимальной величины и дальнейшее увеличение входного напряжения не влияет на сопротивление канала.
При входном напряжении выше U" выходное напряжение логического нуля (U0вых) определяется соотношением : U0вых = Е * Rк мин / (R + Rк мин). Где : Rк – минимальное сопротивление канала.
Величины U', U" и Rк мин - определяются технологическими параметрами: степень легирования канала, степень шероховатости поверхности канала, геометрические размеры канала; а также напряжением питания электронного ключа.
На
участке А-В, т.е. при входном напряжении
от U' до U" электронный ключ работает
как аналоговый усилитель с коэффициентом
усиления Ku =
![]() Uвых
/
Uвых
/
![]() Uвх
.
Uвх
.
Точка пересечения передаточной характеристики с биссектрисой первого квадранта (точка С на рис. слева) определяет пороговое напряжение Uпор электронного ключа.
Переходная характеристика КМОП ключа приведена на рис. справа. При нулевом входном напряжении транзистор с n-каналом VT1 закрыт (сопротивление канала очень велико), а транзистор с р-каналом VT2 открыт (сопротивление канала – Rк мин ), т.к. к его затвору относительно истока приложено напряжение источника питания.
Поэтому
на выходе ключа напряжение логической
единицы : U1вых = +Е. При увеличении
входного напряжения выше U' (точка А
на рис. справа) начинает уменьшаться
сопротивление канала транзистора VT1,
а сопротивление канала VT2 - увеличивается.
Выходное напряжение постепенно
уменьшается и в конце участка А-В
практически доходит до нуля (U0вых = 0)
при полном закрывании транзистора VT2 и
уменьшении сопротивления канала
транзистора VT1 до величины Rк мин На
участке А-В оба транзистора работают в
активном режиме усиления аналогового
сигнала с коэффициентом усиления по
напряжению: Ku =
![]() Uвых
/
Uвых
/
![]() Uвх
.
Uвх
.
При этом оба канала имеют конечное сопротивление и через два транзистора течет сквозной ток от источника питания. С увеличением входного напряжения выше U" канал транзистора VT2 закрывается и ток через КМОП ключ от источника питания не потребляется. Таким образом, при входном напряжении ниже U' а также выше U" ток через КМОП ключ от источника питания практически не течет. Статическая потребляемая мошность близка к нулю. Пороговое напряжение Uпор определяется как точка пересечения передаточной характеристики с биссектрисой первого квадранта (точка С). Пороговое напряжение почти равно половине напряжения источника питания. Участок с напряжением U'- U" примерно равен 10..20% от напряжения источника питания, но имеет технологический разброс относительно середины напряжения источника питания. Поэтому входное напряжение низкого логического уровня U0вх должно быть менее 1/3 напряжения источника питания, а входное напряжение высокого логического уровня U1вх должно быть более 2/3 напряжения питания. Абсолютное значение напряжения источника питания +Е может изменяться в широких пределах от 3 до 15 Вольт. Это позволяет питать КМОП логические схемы от нестабилизированного источника питания, что значительно упрощает и удешевляет источник питания.
Характеристики рассмотренных элементов логики:
|
Диапазон напряжений питания, В |
3..15 |
|
Диапазон рабочих температур |
-40..+85 |
|
Входное напряжение (U1вх/ U0вх) |
>3,15/ < 0,9 |
|
Выходное напряжение (U1вых/ U0вых) |
Eп / 0,1 |
|
Входной ток, мкА (I1вх/I0вх) |
< 0,3/< 0,3 |
|
Выходной ток, мА (I1вых/I0вых) |
0,5/0,5 |
|
Максимальн.частота переключения, МГц |
до 150 МГц |
1.4 ТРИГЕРИ: КЛАСИФІКАЦІЯ ТА КОРОТКА ХАРАКТЕРИСТИКА РІЗНИХ ТИПІВ ТРИГЕРІВ. ОСОБЛИВОСТІ СХЕМОТЕХНІЧНОЇ РЕАЛІЗАЦІЇ ТА ФУНКЦІОНУВАННЯ.
Триггеры -это устройства предназначенные для хранения одного разряда информации. Триггеры имеют два устойчивых состояния: состояние "0" и состояние "1" .
RS Вход R - это вход установки триггера в состояние логического 0, вход S - это вход установки триггера в состояние логической 1. Асинхронным - называется такой триггер, который меняет свое состояние в момент подачи входного сигнала на входы S и R. Активным сигналом для этой схемы является логическая 1. Работа триггера определяется таблицей переходов.
|
|
|
|
|
||||||||||||||||||||
|
Асинх. RS. |
Асинх. RS. УГО |
Таблица переходов |
Временные хар-ки |



Кроме вышеприведенного асинхр. RS триггера с прямыми входами применяются также асинхр. RS триггера с инверсными входами и синхронные RS триггеры.
T-тригер
|
|
|
|
|||||||||
|
T-тригер |
Таблица переходов |
Временные хар-ки |

Это устройство с двумя устойчивыми состояниями и одним информационным входом Т ,такой триггер называется асинхронный Т-триггер. Т-триггер работает по заднему фронту информационного сигнала. С приходом 1 на вход Т, триггер меняет свое состояние на противоположное.
D-тригер
|
|
|
|
|
||||||||||||||||
|
T-тригер |
T-тригер УГО |
Таблица переходов |
Временные хар-ки |



D -триггер
(триггер задержки) - это устройство
с двумя устойчивыми состояниями, и одним
информационным входом.
-триггер
(триггер задержки) - это устройство
с двумя устойчивыми состояниями, и одним
информационным входом.
JK-тригер
При подаче переднего фронта импульса на вход С, начинает работать первый синхронный RS-триггер,
который построен на элементах 1,2,3,4. Значение на выходе RS-триггера определяется значением на входе Jи K. Второй RS-триггер находится в режиме хранения. При подаче на вход С заднего фронта синхроимпульса, первый RS-триггер переходит в режим хранения. Его значение на выходе поступает на второй RS-триггер.
|
|
|
|


1.5 РЕГІСТРИ: ПРИЗНАЧЕННЯ ТА КЛАСИФІКАЦІЯ. ПАРАЛЕЛЬНІ ТА ПОСЛІДОВНІ РЕГІСТРИ. ОСОБЛИВОСТІ СХЕМОТЕХНІЧНОЇ РЕАЛІЗАЦІЇ ТА ФУНКЦІОНУВАННЯ.
Назначение регистров – прием, хранение и выдача двоично-кодированной информации (двоичных чисел, слов). Они используются в качестве безадресных запоминающих устройств, преобразователей и генераторов кодов, устройств временной задержки цифровой информации, делителей частоты и др.
Классификация:
Различают параллельные регистры, последовательные, последовательно-параллельные и параллельно-последовательные. Регистры бывают парафазные и однофазные (Однофазные - поступает код числа. Парафазные - вместе с кодом числа поступает и его инверсия)
ПАРАЛЛЕЛЬНЫЕ РЕГИСТРЫ применяются для хранения информации, представленной в виде двоичного кода. Такие регистры должны по тактовому разрешающему сигналу (это может быть короткий импульс или фронт импульса) принимать параллельный код входной информации и хранить его до прихода следующего разрешающего сигнала. Для построения параллельных регистров наиболее удобны однотактные или двухтактные D-триггеры. На рис. показан пример параллельного регистра на однотактных D-триггерах, управляемых потенциалом. В момент подачи на синхровходы С1, С2 коротких положительных импульсов двоичный код со входов D1...D4 защелкивается в триггеры и может быть прочитана на выходах Q1...Q4.
D1│ D2│ D3│ D4│
│ ┌─┬───┐ │ ┌─┬───┐ │ ┌─┬───┐ │ ┌─┬───┐
└─┤D│ T1├──┐ └─┤D│ T2├──┐ └─┤D│ T3├──┐ └─┤D│ T4├──┐
│ │ │ │ │ │ │ │ │ │ │ │ │ │ │ │
┌─┤C│ o │ ┌─┤C│ o │ ┌─┤C│ o │ ┌─┤C│ o │
С1│ └─┴───┘ │ │ └─┴───┘ │ С2│ └─┴───┘ │ │ └─┴───┘ │
──┴──────────│────┘ │ ──┴──────────│────┘ │
│Q1 │Q2 │Q3 │Q4
Параллельный регистр на однотактных D-триггерах
ПОСЛЕДОВАТЕЛЬНЫЕ РЕГИСТРЫ (или регистры сдвига) широко применяются в цифровой вычислительной технике для преобразования последовательного кода в параллельный, или параллельного в последовательный.
Последовательные регистры можно реализовать ТОЛЬКО на двухтактных триггерах, управляемых фронтом. На рис. приведена схема сдвигающего регистра на последовательно соединенных D-триггерах.
D1 ┌─┬───┐Q1│ ┌─┬───┐Q2│ ┌─┬───┐Q3│ ┌─┬───┐ Qn
────┤D│ T1├──┴─┤D│ T2├──┴─┤D│ T3├──┴─∙∙∙─┤D│ Tn├────
│ │ │ │ │ │ │ │ │ │ │ │
┌─/C│ o ┌─/C│ o ┌─/C│ o ┌─/C│ o
C │ └─┴───┘ │ └─┴───┘ │ └─┴───┘ │ └─┴───┘
───┴──────────┴──────────┴──────────∙∙∙─┘
Вход D1 первого триггера служит для приема в регистр информации в виде последовательного кода.
По восходящему фронту на входе "С" информация со входа D1 запишется в первый триггер, а логический уровень, который был на выходе Q1 до начала восходящего фронта тактового импульса, запишется во второй триггер. И так каждый последующий триггер устанавливается в состояние, в котором до этого находился предыдущий, осуществляя тем самым сдвиг информации на один разряд вправо.
1.6 ЛІЧИЛЬНИКИ: ПРИЗНАЧЕННЯ ТА КЛАСИФІКАЦІЯ. АСИНХРОННІ ЛІЧИЛЬНИКИ. ОСОБЛИВОСТІ СХЕМОТЕХНІЧНОЇ РЕАЛІЗАЦІЇ ТА ФУНКЦІОНУВАННЯ.
Счетчики - это устройства предназначенные для подсчета числа сигналов, поступающих на его вход и фиксация этого числа в виде кода хранящегося в триггерах. Количество разрядов счетчика определяется наибольшим числом, которое должно быть получено в каждом конкретном случае. Для подсчета и выдачи результата счетчики имеют один вход и n выходов, где n -количество разрядов. В общем случае счетчик имеет 2ⁿ устойчивых состояния, включая и 0 -е. Количество устойчивых состояний называется коэффициентом пересчета счетчика (М= 2ⁿ).
По назначению счетчики подразделяются на: простые и реверсивные.
Простые счетчики- счетчики, работающие только на сложение или вычитание.
Реверсивный счетчик может работать и на сложение и на вычитание.
Суммирующий счетчик предназначен для выполнения счета в прямом направление, т.е. с приходом очередного сигнала показатель счетчика увеличивается на 1. Вычитающий счетчик предназначен для счета в обратном направлении, т.е. с приходом новогосигнала счетчик уменьшается на 1 .
По способу организации счета счетчики бывают: асинхронные или синхронные.
По способу организации цепей переноса между разрядами счетчика счетчики бывают: последовательные, параллельные и частичнопараллельные.
Видно, что триггер младшего разряда переключается каждым счетным импульсом, т.е. входом счетчика служит вход этого триггера. Состояния второго и третьего триггеров меняются соответственно каждым вторым и четвертым импульсом. Это обеспечивается последовательным соединением триггеров.
Из правила прибавления к двоичному числу единицы также известно, что изменение значения i-го разряда происходит тогда, когда до прибавления очередной единицы все предыдущие разряды были единицами. Отсюда следует правило: если триггеры имеют прямой счетный вход, то он подключается к инверсному выходу предыдущего триггера; если имеет инверсный вход, то он подключается к прямому выходу.
Иллюстрирующий пример трехразрядного суммирующего счетчика с временными диаграммами работы и условным изображением приведен на рис. 13.27. Счетчик может принимать 8 различных состояний, которые повторяются через каждые 8 входных импульсов (Kn=8). С наибольшей частотой переключается триггер младшего разряда, следовательно, разрешающая способность счетчика определяется временем задержки переключение триггера (Тст=Ттг). Это положение распространяется на все типы двоичных счетчиков.


При подаче на вход вычитающего счетчика одного счетного импульса ранее записанное в нем число уменьшается на единицу.
Принципы построения вычитающих счетчиков основаны на правилах вычитания двоичных чисел и отличаются от принципов построения суммирующих счетчиков лишь тем, что если триггеры имеют прямой вход +1, то его подключают к прямому выходу предыдущего триггера, если вход инверсный, то подключают к инверсному выходу.
На рис. 13.28 приведен пример, аналогичный рис. 13.27. Здесь дополнительный вход S позволяет предварительно устанавливать все триггеры в единичное состояние.
1.7. СИНХРОННІ ЛІЧИЛЬНИКИ: ОСОБЛИВОСТІ СХЕМОТЕХНІЧНОЇ РЕАЛІЗАЦІЇ ТА ФУНКЦІОНУВАННЯ.
У синхронных счетчиков все разрядные триггеры синхронизируются параллельно одними и теми же синхроимпульсами, поступающими из источника этих импульсов. синхронные счетчики иногда - параллельными.
Синхронные счетчики, в свою очередь, подразделяются на параллельно-синхронные и последовательно-синхронные. Параллельные счетчики имеют более высокую скорость счета, чем асинхронные.

Синхронный последовательный счетчик. По способу подачи синхроимпульсов такие счетчики параллельные, т.е. синхроимпульсы поступают на все триггеры счетчика параллельно, а по способу управления (подачи управляющих импульсов) - последовательные.
Синхронный последовательный счетчик обладает повышенным быстродействием, однако, за счет последовательного формирования управляющих уровней, на входы “J” и “К” счетных триггеров, быстродействие несколько уменьшается. От этого недостатка лишены параллельные синхронные счетчики, в которых формирование управляющих уровней и их подача на соответствующие входы триггеров счетчика осуществляется одновременно, т.е. параллельно.

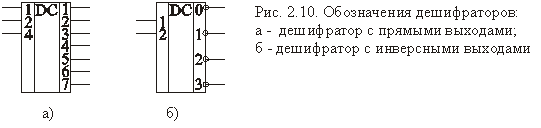
1.8. ДЕШИФРАТОРИ: ВИЗНАЧЕННЯ, КЛАСИФІКАЦІЯ, СПОСОБИ ПОБУДОВИ ТА ФУНКЦІОНУВАННЯ. ЛИНЕЙНЫЙ ИЛИ ОДНОСТУПЕНЧАТЫЙ ДЕШИФРАТОР.
Дешифратор - это комбинационное устройство, предназначенное для преобразования параллельного двоичного кода в унитарный, т.е. позиционный код. Обычно, указанный в схеме номер вывода дешифратора соответствует десятичному эквиваленту двоичного кода, подаваемого на вход дешифратора в качестве входных переменных, вернее сказать, что при подаче на вход устройства параллельного двоичного кода на выходе дешифратора появится сигнал на том выходе, номер которого соответствует десятичному эквиваленту двоичного кода. Отсюда следует то, что в любой момент времени выходной сигнал будет иметь место только на одном выходе дешифратора. В зависимости от типа дешифратора, этот сигнал может иметь как уровень логической единицы (при этом на всех остальных выходах уровень логического 0), так и уровень логического 0 (при этом на всех остальных выходах уровень логической 1). В дешифраторах каждой выходной функции соответствует только один минтерм, а количество функций определяется количеством разрядов двоичного числа. Если дешифратор реализует все минтермы входных переменных, то он называется полным дешифратором (в качестве примера неполного дешифратора можно привести дешифратор двоично-десятичных чисел). Рассмотрим пример синтеза дешифратора (полного) 3 ® 8, следовательно, количество разрядов двоичного числа - 3, количество выходов - 8.( Рис 2.9)
Таблица состояний дешифратора
-
Х3 Х2Х1
Z0 Z1 Z2 Z3 Z4 Z5 Z6 Z7
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
1 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0
0 0 1 0 0 0 0 0
0 0 0 1 0 0 0 0
0 0 0 0 1 0 0 0
0 0 0 0 0 1 0 0
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 1
Как следует из таблицы состояния, каждой функции соответствует только один минтерм.
Из полученных уравнений и схемы дешифратора следует, что для реализации полного дешифратора на m входов (переменных) потребуются n = 2m элементов конъюнкции (количество входов каждого элемента “И” равно m)и m элементов отрицания.

1.9 ШИФРАТОРИ. ВИЗНАЧЕННЯ, ПРИНЦИПИ ПОБУДОВИ ТА ОСОБЛИВОСТІ ФУНКЦІОНУВАННЯ. КЛАВІАТУРНІ, ПРІОРИТЕТНІ ШИФРАТОРИ, КОДОПЕРЕТВОРЮВАЧІ.
Шифратор - это логическое устройство, выполняющее преобразование позиционного кода в n разрядный двоичный код. Таким образом, шифратор - это комбинационное устройство, реализующее обратную дешифратору функцию.
Пример шифратора для трех переменных.
Таблица состояния шифратора:

Схема шифратора семиразрядного позиционного кода в трехразрядный двоичный код приведена на рис. 2.12.


1.10. МУЛЬТИПЛЕКСОРИ: ВИЗНАЧЕННЯ, ПРИНЦИПИ ПОБУДОВИ ТА ФУНКЦІОНУВАННЯ.
Мультиплексор - коммутатор цифровых сигналов. Мультиплексор представляет собой комбинационное устройство с m информационными, n управляющими входами и одним выходом. Функционально мультиплексор состоит из m элементов конъюнкции, выходы которых объединены дизъюнктивно с помощью элемента ИЛИ с m входами. На одни входы всех элементов конъюнкции подаются информационные сигналы, а другие входы этих элементов соединены с соответствующими выходами дешифратора с n входами.
Функциональная схема мультиплексора приведена на рис.2.13.

Из рис. 2.13. следует, что мультиплексор содержит дешифратор на соответствующее число выходов (число выходов дешифратора определяется числом информационных входов мультиплексора), элементы конъюнкции на два или на три входа каждый и элемент дизъюнкции с числом входов, равным количеству информационных линий D0 . . . Dm. Число входов элементов И может быть равным только двум, однако, во многих случаях возникает необходимость стробирования выходного сигнала мультиплексора импульсами независимого источника. В таких случаях в структуре мультиплексора используются элементы И с тремя входами. Одни из входов всех элементов конъюнкции, в последнем случае, объединяются, и по этой линии подается сигнал разрешения работы мультиплексора (стробирующий сигнал). Наличие дополнительного управляющего входа расширяет функциональные возможности мультиплексора и позволяет проще реализовать методы борьбы с гонками.

На рис. 2.14 показано обозначение мультиплексора на принципиальных и функциональных электрических схемах.
Из уравнения мультиплексора видно, что на его выход будет передаваться сигнал только с одного входа, номер которого совпадает с числом, соответствующим кодовой комбинации Х1 и Х2. Если Х1=Х2=0, на выход мультиплексора будет передаваться сигнал с входа D0. Когда на адресных (управляющих) входах Х1=1 и Х2=0, то на выход будет передаваться сигнал с входа D1 и т.д.
На базе мультиплексоров можно построить различные комбинационные устройства с минимальным числом дополнительных элементов логики. Следует отметить, что мультиплексоры хотя, и предназначены для коммутации цифровых сигналов, но с помощью мультиплексоров, изготовленных по КМОП технологии, можно коммутировать и аналоговые сигналы.
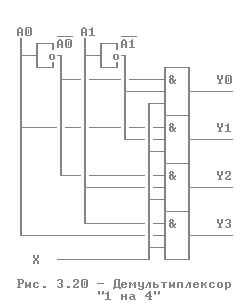
1.11. ДЕМУЛЬТИПЛЕКСОРИ: ВИЗНАЧЕННЯ, ПРИНЦИПИ ПОБУДОВИ ТА ФУНКЦІОНУВАННЯ.
Демультиплексор – єто обратное Мультиплексору (вопрос 1.10)
В цифровых устройствах часто возникает
задача передачи цифровой информации
от "m" различных устройств к "n"
приемникам через канал общего
пользования. Для этого на входе канала
устанавливается устройство, называемое
МУЛЬТИПЛЕКСОРОМ, которое согласно
коду адреса A m подключает к каналу один из источников
информации, а на выходе канала устройство
ДЕМУЛЬТИПЛЕКСОР обеспечивает передачу
информации к приемнику, имеющему
цифровой адрес A n
подключает к каналу один из источников
информации, а на выходе канала устройство
ДЕМУЛЬТИПЛЕКСОР обеспечивает передачу
информации к приемнику, имеющему
цифровой адрес A n
╔═════╦════════╦═══════════════╗
║Вход ║ Адрес ║ Выходы ║
║─────║────────║───────────────║
║ X ║ A1 A0 ║Y3 Y2 Y1 Y0 ║
╠═════╬════════╬═══════════════╣
║ 0 ║ 0 0 ║ 0 0 0 0 ║
║ 1 ║ 0 0 ║ 0 0 0 1 ║
║─────║────────║───────────────║
║ 0 ║ 0 1 ║ 0 0 0 0 ║
║ 1 ║ 0 1 ║ 0 0 1 0 ║
║─────║────────║───────────────║
║ 0 ║ 1 0 ║ 0 0 0 0 ║
║ 1 ║ 1 0 ║ 0 1 0 0 ║
║─────║────────║───────────────║
║ 0 ║ 1 1 ║ 0 0 0 0 ║
║ 1 ║ 1 1 ║ 1 0 0 0 ║
╚═════╩════════╩═══════════════╝
Логика функционирования демультиплексора для случая n = 4 иллюстрируется таблицей 3.6, в которой Y0...Y3 - сигналы, подаваемые на входы приемников информации.
1.12. СУМАТОРИ КОМБІНАЦІЙНОГО ТИПУ: ПРИЗНАЧЕННЯ, КЛАСИФІКАЦІЯ ТА ПРИНЦИПИ ПОБУДОВИ.
Сумматор - это ЛКС (рис. 3.8), формирующая сигналы суммы (S) и переноса (Р) при сложении двух двоичных чисел (А, В) и сигнала переноса соседнего младшего разряда (С) по правилам двоичной арифметики (см. таблицу 3.3).
┌──┬───┬──┐
────┤А │SM │ S├────
────┤В │ │ │
├──┤ │ │
────┤С │ │ P├────
└──┴───┴──┘
Рис. 3.8 - Одноразрядный сумматор
Таблица 3.3 -Таблица состояний одноразрядного сумматора
A │ B │ C ║ P │ S
────┼───┼────╫────┼───
0 │ 0 │ 0 ║ 0 │ 0
0 │ 0 │ 1 ║ 0 │ 1
0 │ 1 │ 0 ║ 0 │ 1
0 │ 1 │ 1 ║ 1 │ 0
1 │ 0 │ 0 ║ 0 │ 1
1 │ 0 │ 1 ║ 1 │ 0
1 │ 1 │ 0 ║ 1 │ 0
1 │ 1 │ 1 ║ 1 │ 1
Принципиальная схема одноразрядного сумматора, реализованная на элементах "И-ИЛИ-НЕ", приведена на рис. 3.10.
Более простая схема сумматора может быть реализована с учетом соотношения : сигнал суммы (S) равен единице, если только один входной сигнал (А, В, С) равен единице и отсутствует перенос (Р) или все три входных сигнала равны единице :
_ _ _
S = A P + B P + C P + A B C (3.7)


Упрощенная схема одноразрядного сумматора, реализующая функцию (3.7), приведена на рис. 3.11. В этой схеме время задержки распространения сигнала суммы (S) больше, чем время задержки сигнала переполнения (Р).
Логический элемент "И-ИЛИ-НЕ" имеется в наборе любой серии ТТЛ и ТТЛШ (см. рис. 2.16). Для КМОП элементов эти схемы сумматоров легко реализуются в базисе "И-НЕ".
На основе одноразрядного сумматора реализуются схемы многоразрядных сумматоров. На рис. 3.12 приведена схема четырехразрядного сумматора (аналогично можно реализовать сумматор на 8 или 16 разрядов). На входы А1..А4 подается первое слагаемое (младший разряд - А1), на входы В1..В4 - второе. Вход переноса (С) младшего разряда подключен к нулевому логическому уровню (к общей шине).Четыре разряда суммы формируются на выходах S1..S4, пятый разряд суммы - на выходе Р4.

В формировании сигналов S4, P4 участвуют все входные переменные А1..А4, В1..В4. Но ко входам последней логической схемы эти сигналы проходят через разное количество элементов, что вызывает появление на выходах ложных коротких импульсов, образованных эффектом гонок (состязаний).
Многоразрядный сумматор с последовательным переносом. Таким образом, в общем случае для каждого разряда необходима логическая схема с тремя входами ai, bi, Ci и двумя выходами Si, Ci+1. Такая схема и есть полный сумматор. Ее можно реализовать с помощью двух полусумматоров.
|
Входы |
Промежуточные величины |
Выходы |
|||||
|
ai |
bi |
сi |
Pi |
gi |
ri |
Si |
Ci+1 |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
0 |
1 |
0 |
1 |
0 |
0 |
1 |
0 |
|
1 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
|
1 |
1 |
0 |
0 |
1 |
0 |
0 |
1 |
|
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
|
0 |
1 |
1 |
1 |
0 |
1 |
0 |
1 |
|
1 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
|
1 |
1 |
1 |
0 |
1 |
0 |
1 |
1 |
Для сложения двух многоразрядных двоичных чисел на каждый разряд необходим один полный сумматор. Только в младшем разряде можно обойтись полусумматором. На рис. 2.23 приведена схема, предназначенная для сложения двух четырехразрядных чисел А и В. Эта схема выпускается в интегральном исполнении. В ее младшем разряде также используется полный сумматор, чтобы иметь возможность наращивания разрядности схемы.
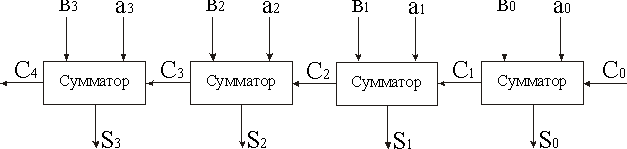
Рис. 2.23. Сумматор с последовательным переносом
Сумматоры с параллельным переносом. Время выполнения операции в сумматоре с параллельным переносом намного больше времени сложения в одноразрядном сумматоре. Действительно, сигнал переноса С4 только тогда может принять истинное значение, когда будет установлено правильное значение С3. Такой порядок выполнения операций называется последовательным переносом (Ripple Carry).
Чтобы уменьшить время операции сложения многоразрядных чисел можно использовать схемы параллельного переноса (Carry look-ahead). При этом все сигналы переноса вычисляются непосредственно по значениям входных переменных.
Согласно таблице переключений, в общем случае для сигнала переноса любого i-го разряда справедливо соотношение:
![]() . (1)
. (1)
Величины gi, ri вычисляются в качестве промежуточных результатов и в полном сумматоре. Следовательно, их получение не требует дополнительных затрат. Смысл этих величин объясняется совсем просто. Сигнал gi вырабатывается тогда, когда в данном разряде перенос происходит из-за комбинации входных переменных ai,bi. Поэтому его называют функцией генерации переноса. Сигнал Pi показывает, передается ли полученный в младшем разряде сигнал переноса Ci дальше. Поэтому он называется функцией распространения переноса.
Пользуясь выражением (1), можно вывести следующие формулы для вычисления сигналов переноса:
 (2)
(2)
Очевидно, что хотя полученные выражения достаточно сложные, время формирования сигнала переноса в любой разрад с помощью вспомогательных функций определяется только времением здержки распространения сигнала на двух элементах. Эти функции реализуются специальным комбинационным устройством – схемой ускоренного переноса.
Схема сумматора с параллельным переносом приведена на рис. 2.24, а. На рис. 2.24, б изображена схема устройства параллельного переноса в группе из четырех разрядов. Эта схема реализует систему уравнений (2).

Рис. 2.24. Схема сумматора с параллельным переносом
1.13. НАКОПИЧУЮЧІ СУМАТОРИ ТА ОСОБЛИВОСТІ ЇХНЬОГО ФУНКЦІОНУВАННЯ.
Накапливающий сумматор (НС) обычно представляет собой совокупность сумматора комбинационного типа и регистра (который хранит результаты суммирования как текущие, так и окончательные). Работает такой сумматор по формуле Si = Si-1 + A, ( формула 1.1) где
Si –текущая сумма,
Si-1 –предыдущая(на предыдущем цикле суммирования),
А – очередное текущее слагаемое.
Результат замещает старое значение суммы. Очередное прибавление слагаемого тактируется синхроимпульсами. Учитывая такие особенности функцио-нирования накапливающие сумматоры называются иногда аккумуляторами. На схемах сумматоры обозначаются SM. В российских сериях интегральных микросхем(ИМС), соответственно – ИР(например-К155ИМ3). В американских
сериях они отдельно не обозначаются: SN40S08N. Интегральные микросхемы содержат,как правило, четырехразрядные комбинационные сумматоры. Чаще всего применяют четырехразрядные сумматоры комбинационного типа. Помимо выходных разрядов суммы и выхода переноса в сумматорах предусмотрен вход расширения С для обьединения сумматоров с целью повышения разрядности.
Многоразрядные сумматоры можно построить, прибегнув к обьединению синхронизирующих входов, а также соединению соответствующих входов и выходов переноса нескольких базовых сумматоров.
Эти сумматоры являются ядром арифметико-логических устройств(АЛУ) , без которых, в свою очередь, не было бы процессоров. По сути, эти устройства является интегральными микросхемами, без которых не обходится ни один компьютер в целом, ни сколько-нибудь сложное цифровое устройство, где необходимо выполнять арифметичесие операции.
Накапливающие сумматоры применяются также, например, для формирования адреса ОЗУ, в генераторах сигналов произвольной формы.
На основании формулы 1.1, описывающе по сути алгоритм работы НС можно предложить структурную схему, приведенную на рис 1.1. Схема работает следующим образом: Перед началом суммирования регистр устанавливается в нулевое состояние по входу R. После поступления слов в сумматор происходит обработка результата, то есть проверяется перенос и происходит собственно суммирование. С выходов сумматора результат суммы поступает на регистр (РГ), который служит для хранения информации и задержки сигнала на один такт. Естественно, сигналы через него будут проходить в том случае, если открыт вход синхронизации. Затем с выходов регистра сигналы поступают в качестве второго слагаемого(20-ти разрядного) на сумматор. Такой цикл повторяется до тех пор, пока не прекратится подача последовательности кодов либо сумма не превысит разрядность 20 (в этом случае сумматор сбрасывается в 0.

1.14 МОДЕЛЮВАННЯ АНАЛОГОВИХ ТА ЦИФРОВИХ СХЕМ ЗА ДОПОМОГОЮ ПАКЕТІВ EWB і MICRO-CAP: ПОСЛІДОВНІСТЬ ДІЙ ПРИ МОДЕЛЮВАННІ. ОДЕРЖАННЯ ТА ОФОРМЛЕННЯ РЕЗУЛЬТАТІВ.
Программно-прикладной пакет (ППП) EWB (цифровая часть) предназначен для разработки схем цифровых устройств на цифровых элементах и анализа их работы в динамике и статике с возможностью
моделирования различных режимов работы. Пакет позволяет получать
несколько вариантов реализации схемных решений при разработке одного и того же цифрового устройства, что позволяет выбрать оптимальный алгоритм работы.
В программно-прикладном пакете (далее - ППП) «Electronics
WorkBench 3.0E» (далее - EWB) пользователю предоставлена возможность использовать в своей работе 7 приборов (Мультиметр, Генератор Слов, Логический Анализатор, Логический преобразователь).
Краткое описание этих приборов и работа с ними.
Мультиметр
Мультиметр прост в обращении и удобен в эксплуатации. Мультиметр способен измерять любые электрические параметры при постоянном и переменном токе, как то напряжение, ток, сопротивление и децибелы. На панели мультиметра имеются 2 рабочих входа + и - , кнопки переключения режима работы по току и кнопки рода работы.
Генератор слов
Генератор слов (ГС) используется для генерации сигналов, который могут являться входными сигналами схемы. ГС может генерировать 8 слов (16 бит одновременно). Он имеет 8 информационных выводов, при этом номер вывода соответствует номеру слова на экране ГС. ГС также генерирует импульсы синхронизации (вывод CLOCK
«CLK»). ГС имеет один вход TRIGGER - это так называемый вход
внешнего запуска.
Логический анализатор
16-канальный ЛА отображает поступающую на его входы последовательность сигналов в виде последовательности прямоугольных им
пульсов. ЛА также показывает двоичные и шестнадцатеричные значения этих сигналов.
Логический преобразователь
Логический преобразователь (ЛП) - это мощное устройство, которое выполняет различные функции конвертирования. Пользователю
доступны следующие преобразования:
преобразование схемы в таблицу истинности;
-
преобразование таблицы истинности в логическое выражение;
-
упрощение логического выражения;
-
преобразование логического выражения в таблицу истинности;
-
преобразование логического выражения в схему;
-
преобразование логического выражения в схему в базисе И-НЕ.
Осциллограф.
Двухканальный осциллограф показывает изменение амплитуды и частоты электрического сигнала. Он позволяет одновременно следить за одним или двумя сигналами, а также позволяет получать график сравнения двух различных сигналов.
Для того чтобы подсоединить осциллограф к схеме, надо поместить соединитель в точку схемы , откуда вы хотите снимать сигнал. После чего заведите проводник из соединителя на канал осциллографа. Терминал осциллографа “GROUND” необходимо заземлить. Для отслеживания работы электрической схемы достаточно одного осциллографа, изменение точек подключения каналов осциллографа не требует перезапуска и его можно производить непосредственно в работающей схеме.
Разработка схем цифровых устройств
5.1. Вывод элементов схем на рабочую поверхность
Для того, чтобы переместить элемент на рабочую поверхность,
нужно подвести указатель «мыши» к изображению выбранного элемента, нажать клавишу «мышки» и, не отпуская ее, переместить элемент в нужное место схемы.
-
Монтаж схем
Д
нравится как пакет провёл проводник, вы можете самостоятельно переместить проводник на схеме в рабочей области пользователя. При необходимости соединения двух или нескольких проводников в один можно воспользоваться той же технологией что и при соединении элементов схемы, но следует помнить, что при попытке соединить более четырёх проводников в одной точке, связь с каким либо проводником уже подключённым будут утеряны. Что бы этого не случилось, необходимо создать соединение ( Connector ), на каком либо из соединённых проводников
МОДЕЛИРОВАНИЕ РАБОТЫ СХЕМЫ
6.1. Запуск схем
Запуск схемы осуществляется тремя способами:
первый способ заключается в нажатии кнопки запуска схемы
на
исполнение, расположенной в верхнем
правом углу окна;![]()
второй способ заключается в нажатии комбинации «горячих
клавиш» CRL+G;
третий способ состоит в выборе опции Activate пункта меню Analysis;
6.2. Ошибки в исключительных ситуациях
При моделировании работы схемы возможно два вида ошибок, которые определяются автоматически. Это Race Conditions (гонки).
Вторая возможная детектируемая ошибка - это Contradictions, т.е.
некорректное подключение проводов.
6.3. Приостановка и возобновление моделирования
Для временного останова моделирования работы схемы можно использовать два способа:
нажать клавишу F9;
выбрать в меню Analysis опцию Pause.
6.4. Остановка моделирования
Для останова моделирования работы схемы можно использовать
два способа:
нажать комбинацию «горячих клавиш» CTRL+T;
нажать кнопку запуска схемы
на
исполнение, расположенной в верхнем
правом углу окна![]() ;
;
выбрать в меню Analysis опцию Stop.
1.15 ОСОБЛИВОСТІ ТА ПРИНЦИПИ ПОБУДОВИ ПРИСТРОЇВ З ВИКОРИСТАННЯМ «ЖОРСТКОЇ» та «ПРОГРАМОВАНОЇ» ЛОГІКИ.
Существует два принципиально разных подхода к проектированию цифровых устройств: использование принципа схемной логики или использование принципа программируемой логики.
В первом случае в процессе проектирования подбирается некоторый набор цифровых микросхем (обычно малой и средней степени интеграции) и определяется такая схема соединения их выводов, которая обеспечивает требуемое функционирование (т.е. функционирование устройства определяется тем, какие выбраны микросхемы и по какой схеме выполнено соединение их выводов). Устройства, построенные на таком принципе системной логики, способны обеспечивать наивысшее быстродействие при заданном типе технологии элементов. Недостаток этого принципа построения МКУ состоит в невозможности "перестройки" структуры устройств и систем при необходимости изменения или расширения их функциональных возможностей.
Эти обстоятельства заставляют обратиться к другому подходу в проектировании цифровых устройств, основанному на использовании принципа программируемой логики. Этот подход предполагает построение с использованием одной или нескольких БИС некоторого универсального устройства, в котором требуемое функционирование (т.е. их специализация) обеспечивается занесением в память устройства определенной программы (или микропрограммы). В зависимости от введенной программы такое универсальное управляющее устройство способно обеспечивать требуемое управление операционным устройством при решении самых различных задач. В этом случае число типов БИС, необходимых для построения управляющего устройства, небольшое, а потребность в БИС каждого типа высока. Это обеспечивает целесообразность их выпуска промышленностью.
Следует иметь ввиду, что наивысшее быстродействие достигается в процессорах, в которых управляющее устройство строится с использованием системной логики, а операционное устройство выполняется в виде устройства, специализированного для решения конкретной задачи.
Если в устройстве, построенном на принципе системной логики, всякое изменение или расширение выполняемых функций влечет за собой демонтаж устройства и монтаж устройства по новой схеме, то в случае МКУ благодаря использованию принципа программируемой логики такое изменение достигается заменой хранящегося в памяти программы новой программой, соответсвующей новым выполняемым устройством функциям. Такая гибкость применений вместе с другими связанными с использованием БИС достоинствами (низкой стоимостью, малыми габаритами), а также высокая точность помехозащищенность, характерные для цифровых методов, обусловили бурное внедрение МКУ в различные сферы производства, научные исследования и бытовую технику.
Микроконтроллерные и микропроцессорные устройства в свою очередь обеспечили широкое использование цифровых методов в различных технических применениях, и размах внедрения этих новых методов рассматривается как революция в технике.
Дуализм "программные средства - аппаратура"
Проектирование МКС производится на базе определенных ОМК. Разработчикам аппаратуры на основе ОМК недоступен уровень отдельных транзисторов, связей между ними. Микроконтроллер воспринимается как нечто цельное, имеющее различные свойства, заложенные в его архитектуре.
Архитектура микроконтроллера - это его логическая организация, определяемая возможностями МК по аппаратурной или программной реализации функций, возлагаемых на проектируемые МКУ. Архитектура отражает структуру МК, способы представления и форматы данных, набор операций, форматы управляющих слов, способы обращения ко всем доступным для пользователя элементам структуры, реакцию МК на внешние сигналы.
При разработке МКС необходимо определить, какая часть функций при создании конкретных МКС должна быть реализована программным способом, а какая - с помощью дополнительных аппаратных средств. Поэтому при проектировании МКС необходимо:
-
дать описание концептуальной модели функционального поведения МКС и рекомендации по организации вычислительного процесса в микроконтроллерной аппаратуре;
-
определить структуру и особенности построения программных средств;
-
описать характеристики внутренней организации потоков данных и управляющей информации;
4) провести анализ функциональной структуры и особенности физической реализации устройств МКС с позиций сбалансированности программных и аппаратных средств.
При разработке архитектуры МКУ определяют форматы данных, обосновывают требования к интерфейсам. Правильный выбор архитек-туры дает возможность оптимизировать вычислительный процесс реа-лизации алгоритмов функционирования МКУ на выбранных аппаратурных средствах. В МКУ процесс оптимизации начинается с решения компро-миса "программные средства - аппаратура", который заключается в том, что в МКУ любое функциональное преобразование может быть осуществлено как программным путём
1.16 ОСНОВНІ ФУНКЦІЇ АЛГЕБРИ ЛОГІКИ ТА ЛОГІЧНІ ЕЛЕМЕНТИ ДЛЯ ЇХ РЕАЛІЗАЦІЇ. Закони АЛГЕБРИ ЛОГІКИ.
Алгебра логики (АЛ) является основным инструментом синтеза и анализа дискретных автоматов всех уровней. АЛ называют также Булевой алгеброй. АЛ базируется на трёх функциях, определяющих три основные логические операции.
1. Функция отрицания (НЕ). f1 =`X читается, как f1 есть (эквивалентна) НЕ Х. Элемент, реализующий функцию НЕ, называется элементом НЕ (инвертором).

Элемент НЕ имеет два состояния.
2. Функция логического умножения (конъюнкции). Функция логического умножения записывается в виде f2=X1·X2. Символы логического умножения &, L, <×>, ´. Функция конъюнкции читается так: f2 есть (эквивалентна) Х1 и Х2, поскольку функция истинна тогда, когда истинны 1-й и 2-й аргументы (переменные). Конъюнкцию называют функцией И, элемент, реализующий эту функцию, элементом И.

В общем случае функцию логического умножения от n переменных записывают так:

Количество переменных (аргументов), участвующих в одной конъюнкции, соответствует количеству входов элемента И.
3. Логическое сложение (дизъюнкция). Функция логического сложения записывается в виде f3=X1 + X2, и читается так: f3 есть Х1 или Х2, поскольку функция истинна, когда истинна одна или другая переменная (хотя бы одна). Поэтому функцию дизъюнкции часто называют функцией ИЛИ. Символы логического сложения +,V.
В общем случае функция ИЛИ записывается:

Используя операции (функции) И, ИЛИ, НЕ можно описать поведение любого комбинационного устройства, задав сколь угодно сложное булево выражение. Любое булево выражение состоит из булевых констант и переменных, связанных операциями И, ИЛИ, НЕ.
Пример булева выражения:
![]() .
.
Основные законы алгебры логики. Основные законы АЛ позволяют проводить эквивалентные преобразования функций, записанных с помощью операций И, ИЛИ, НЕ, приводить их к удобному для дальнейшего использования виду и упрощать запись.
ЗАКОНЫ АЛГЕБРЫ ЛОГИКИ Таблица 1.1
|
N |
а |
б |
Примечание |
|
1 2 3 4 5 |
X+0=X X+1=1 X+X=X X+
|
X*1=X X*0=0 X*X=X X*
|
Аксиомы (тождества) |
|
6 |
|
|
Закон двойного отрицания |
|
7 |
X+Y=Y+X |
X*Y=Y*X |
Закон коммутативности |
|
8 |
X+X*Y=X |
X
|
Закон поглощения |
|
9 |
|
|
Правило де-Моргана (закон дуальности) |
|
10 |
|
|
Закон ассоциативности |
|
11 |
X+Y*Z=
|
|
Закон дистрибутивности |
Булевой алгебре свойственен принцип двойственности, что наглядно иллюстрирован в табл. 1.1. Как следует из табл. 1.1, только закон двойного отрицания не подчиняется этому принципу.
Используя законы алгебры логики, можно упростить булевы выражения, в частности, правило склеивания позволяет упростить выражение типа
![]() .
.
Действительно, используя законы 2, 5 и 11 можно записать исходное выражение в виде Х2(Х1 +`Х1 ) =Х2. Так как логическая операция Х1 +`Х1 = 1 (см. з-н 5), а Х2×1 = Х2 (см. з-н 2б), полученное выражение истинно.
Элементарные функции алгебры-логики. Среди всех функций алгебры логики особое место занимают функции одной и двух переменных, называемые элементарными. В качестве логических операций над переменными, эти функции позволяют реализовать различные функции от любого числа переменных.
Общее количество функций АЛ от m переменных R=2k, где k=2m. Рассмотрим элементарные функции от двух переменных
|
Переменные и их состояния |
Обозначение функции |
Назначение Функции |
||||
|
X1 X2 |
0 0 |
0 1 |
1 0 |
1 1 |
||
|
f0 |
0 |
0 |
0 |
0 |
f0=0 |
Генератор 0 |
|
f1 |
0 |
0 |
0 |
1 |
f1=X1·X2 |
«И» |
|
f2 |
0 |
0 |
1 |
0 |
f2=X1·
|
|
|
f3 |
0 |
0 |
1 |
1 |
f3=X1 |
|
|
f4 |
0 |
1 |
0 |
0 |
f4=
|
|
|
f5 |
0 |
1 |
0 |
1 |
f5=X2 |
|
|
f6 |
0 |
1 |
1 |
0 |
f6=X1
|
Сумматор по модулю два |
|
f7 |
0 |
1 |
1 |
1 |
f7=X1+X2 |
«ИЛИ» |
|
f8 |
1 |
0 |
0 |
0 |
f8=
|
«ИЛИ-НЕ» |
|
f9 |
1 |
0 |
0 |
1 |
f9=X1~X2 |
Функция равнозначности |
|
f10 |
1 |
0 |
1 |
0 |
f10=
|
«НЕ» Х2 |
|
f11 |
1 |
0 |
1 |
1 |
f11=X1+
|
|
|
f12 |
1 |
1 |
0 |
0 |
f12=
|
«НЕ» Х1 |
|
f13 |
1 |
1 |
0 |
1 |
f13=
|
|
|
14 |
1 |
1 |
1 |
0 |
f14=
|
«И-НЕ» |
|
f15 |
1 |
1 |
1 |
1 |
f15=1 |
Генератор 1 |
1.17 СИНТЕЗ ЛОГІЧНИХ СХЕМ В БАЗИСАХ (І, АБО, НІ), І-НІ, АБО-НІ.
В задачу синтеза комбинационных устройств входит построение схемы устройства по заданным условиям его работы и при заданном базисе элементов. Задание комбинационного устройства сводится к заданию тех функций, которые оно должно реализовать. Число функций определяется числом выходов комбинационного устройства.
Процесс синтеза комбинационных устройств состоит из 2-х этапов.
1. Абстрактный синтез
Абстрактный синтез включает:
-
формирование задачи, словесное описание функций устройства, определение типа устройства;
-
описание устройства на формализованных языках:таблица истинности,карта Карно,аналитическое выражение и т.д.;
-
минимизация булевых функций;
-
построение логической схемы устройства.
2. Схемный синтез
-
переход в требуемый базис;
-
построение принципиальной схемы;
-
разработка монтажной схемы;
-
изготовление устройства и его испытания.
В результате испытаний осуществляются корректировка схемы и подготовка технической документации.
Полная система логических функций. Понятие о базисе
Функционально полная система логических функций представляет собой набор логических функций, с помощью которых можно записать любую, сколь угодно сложную функцию. В этом случае говорят, что этот набор образует базис. Функционально полными являются 3 базиса:
1) "И-ИЛИ-НЕ" (базис конъюнкции, дизъюнкции, инверсии)
2) "И-НЕ" (базис Шеффера)
3) "ИЛИ-НЕ" (базис Пирса или функция Вебба).

Элементы, реализующие операцию "И-НЕ", “ИЛИ-НЕ” и “Исключающее ИЛИ” на принципиальных и структурных схемах изображаются так:
Примеры реализации логических операций в базисах “И-НЕ” и “ИЛИ-НЕ”.

Реализация операции “НЕ”:

Реализация операции “И”:

Реализация операции “ИЛИ”:
Пример реализации комбинационного устройства в базисе "И-НЕ". Пусть задана функция, реализуемая комбинационным устройством, в аналитической форме
![]() .
.
Используя закон де Моргана и с учетом закона двойного инвертирования, запишем эту функцию в виде
![]() .
.
Как следует из полученного аналитического
выражения, логическое устройство должно
содержать три двухвходовых и один
трехвходовой элемент И-НЕ. Функциональная
схема комбинационного устройства,
построенная в базисе И-НЕ, показана на
рис.

1.18 ТИПИ ДАНИХ ТА СТРУКТУРИ КОМАНД В МП INTEL (НА ПРИКЛАДI 486)
Рассмотрим данные, их форматы и представление а памяти, с которыми работает МП 80486. Большинство из содержания данного раздела относится ко всем современным процессорам.
Базовой единицей данных является байт. Физический адрес, выдаваемый процессором на внешнюю шину адреса , является адресом (порядковым номером) байта в адресуемом пространстве памяти. Ширина шины адреса (число линий, число разрядов адреса) n определяет максимальное адресное пространство N=2^n. Адрес байта изменяется от 0 до N-1. МП 80486 имеет адресное пространство: n=32, N=2^32 = 4Gбайта.
При ширине шины данных n=32 за одно обращение к памяти передается до 4 байт. Кроме значения данных длинной в байт используются данные длинной 2 байта - слово и 4 байта- двойное слово. В больших машинах (mainframe) под словом понимается длина разрядов аппаратной реализации основных регистров или ширина шины данных. Применительно к МП 80486 его слово состояло бы из 4 байт. Информация в памяти располагается так: младшие разряды в младшем байте - в байте с меньшим адресом, старшие разряды в последующих байтах - в байтах с большими адресами.
МП 80486 имеет команды, длина которых меняется от 1 байта до 15 байтов. Команды содержат всю необходимую информацию для выполнения требуемой операции с заданными операндами. Операнды могут быть размером в бат, слово или двойное слово.
Необязательная часть Обязательная часть
Префиксы
┌───────────────────────┐ ┌────────────────────────────────────┐
│ Число байт │ │ Число байт │
├─────┬─────┬─────┬─────┤ ├──────┬──────┬──────┬───────┬───────┤
│ 0,1 │ 0,1 │ 0,1 │ 0,1 │ │ 1,2 │ 0,1 │ 0,1 │0,1,2,4│0,1,2.4│
├─────┴─────┴─────┴─────┤ ├──────┴──────┴──────┴───────┴───────┤
│ Назначение │ │ Назначение │
╠═════╦═════╦═════╦═════╣ ╠══════╦══════╦══════╦═══════╦═══════╣
║ Пов-║Раз- ║ Раз-║Заме-║ ║ Код ║ ║ ║Смеще -║Непос- ║
║ тор ║ мер ║ мер ║ на ║ ║опера-║ mod ║ sib ║ние (в ║редств.║
║ ║адре-║опе- ║сег- ║ ║ ции ║ ║ ║коман- ║операнд║
║ ║ са ║ранда║мента║ ║ ║ r/m ║ ║ де ║ ║
║REP ║ OS ║ AS ║ S ║ ║ ║ ║ ║ ║ ║
╚═════╩═════╩═════╩═════╝ ╞══════╪══════╪══════╪═══════╩═══════╝
┌────────────────────────┘ │ │ │
│ ┌─────────┘ └───┬┐ └───────────────┐
├───────────────┬──┬──┼─────┬────────┬─────┤├───┬──────┬──────┤
│ Код операции │d │w │ mod │ reg/kon│ r/m ││SS │index │ base │
└───────────────┴──┴──┴─────┴────────┴─────┘└───┴──────┴──────┘
7 2 1 0 7 6 5 3 2 0 7 6 5 4 3 2 1 0
Поле Длина (бит) Назначение
Префиксы
REP Повторение (REPeate), применяется в цепочечных
командах
OS Operand Size -переключает 16 и 32 разрядные
операнды
AS Address Size -определяет формирование 16- и
32-разрядных адресов
171
S Segment override - указывает конкретный сегмент-
ный регистр
LOCK Префикс блокировки шины, при котором формируется сигнал LOCK
Код операции
w 1 Определяет размер операнда в байтах (w=0) или
нет (w=1)
d 1 Определяет направление передачи данных:
из регистра в регистр/память d=0
из регистра/памяти в регистр d=1
S 1 Расширение 8-битных данных до слова (двоичного)
S=1
В общем случае формат команды содержит обязательную и необязательную часть. Минимальная длина команды содержит обязательное поле-код операции, длиной 1 байт (например, команды сброса флагов CLC,CLD,CLI и др).
Необязательной частью команды являются префиксы.
1.19. АРХІТЕКТУРА СИСТЕМНОГО ІНТЕРФЕЙСУ СУЧАСНИХ ПК. ПРИЗНАЧЕННЯ КОМПОНЕНТ. РЕЖИМИ ПЕРЕДАЧІ ІНФОРМАЦІЇ ПО СИСТЕМНИМ ШИНАМ.
Системная или материнская, плата ПК является основой системного блока, определяющей архитектуру и производительность компьютера. На ней устанавливаются следующие обязательные компоненты: процессор и сопроцессор, память (постоянная ROM или Flash BIOS, оперативная DRAM, кэш SRAM), средства вода/вывода, интерфейсные схемы и разъемы шин расширения, кварцевый генератор синхронизации со схемой формирования сброса системы по сигналу PowerGood от блока питания или кнопки RESET, дополнительные стабилизаторы напряжения питания для низковольтных процессоров VRM.
Современные платы исполняются на основе чипсетов – наборов из нескольких БИС, реализующих все функции связи основных компонентов – процессора, памяти и шин росширения. Чипсет определяет возможности применения различных типов процессоров, основной и кэш-памяти и ряд других характеристик системы, определяющих возможности ее модернизации. Его тип влияет на производительность системы.
Современные чипсеты обеспечивают совместимость установленных на системную плату модулей и позволяют во время выполнения POST выполнять автоматическую идентификацию типов установленных компонент.
Основной тактовый генератор системной платы вырабатывает высокостабильные импульсы опорной частоты, используемой для синхронизации процессора, системной шины и шин ввода/вывода. Поскольку быстродействие различных компонентов существенно различается, в компьютерах на процессорах класса 486 и старше применяется деление опорной частоты для синхронизации шин ввода/вывода и внутреннее умножение частоты в процессорах.
Центральную роль в архитектуре играет процессор. К его локальной шине (Host Bus) подключаются модули вторичного кэша. Основная динамическая память имеет собственную мультиплексированную шину адреса и шину данных, обычно изолированную от локальной шины процессора.
Следующий этаж архитектуры – устройства подключенные к PCI. Эта шина является центральной в современных системных платах, и все интерфейсные адаптеры, а также системные средства ввода/вывода в конечном счете общаются с ядром системы через шину PCI. Кроме плат расширения, устанавливаемых в слоты шины PCI, ее абонентом является и мост PIIX.
О сновная
задача шин – объединить в одну систему
разнообразную номенклатуру модулей,
обеспечив их высокопроизводительную
надежную работу. Под надлежащей работой
следует понимать выполнение условий
открытости, совместимости, однотипности,
гибкости, надежности, ремонтопригодности,
эффективности и др. требований. Суть
этих всех требований можно сформулировать
так: замена одних шин другими не должна
сопровождаться появлением архитектурных
ограничений. Наличие существенных
различий в производительности между
различными модулями привело к
необходимости использовать в современных
ПК систему шин, вместо одной общей.
сновная
задача шин – объединить в одну систему
разнообразную номенклатуру модулей,
обеспечив их высокопроизводительную
надежную работу. Под надлежащей работой
следует понимать выполнение условий
открытости, совместимости, однотипности,
гибкости, надежности, ремонтопригодности,
эффективности и др. требований. Суть
этих всех требований можно сформулировать
так: замена одних шин другими не должна
сопровождаться появлением архитектурных
ограничений. Наличие существенных
различий в производительности между
различными модулями привело к
необходимости использовать в современных
ПК систему шин, вместо одной общей.
У разных шин организация работы разная. Однако при при этом ряд положений используется общий. Общая организация работы шины может быть представлена как совокупность механизмов каждый из которых выполняет вполне определенную функцию передачи информации, например, чтение из памяти или порта запись в них и т.д. Организацию управления работы шины можно представить, как переход от выполнения одного механизма к другому.
В ремя,
занимаемое выполнением отдельного
механизма называется циклом шины.
Продолжительность цикла шины является
случайной величиной, а его начало и
конец являются асинхронными. Для
упрощения управления шиной длина цикла
составляется из временных квантов
одинаковой продолжительности, называемых
тактом шины. Во время любого такта цикла
шины выполняются определенные действия,
которые можно разбить на две группы:
установление состояния шины и выполнение
команд, предписанных реализуемым
механизмом передачи.
ремя,
занимаемое выполнением отдельного
механизма называется циклом шины.
Продолжительность цикла шины является
случайной величиной, а его начало и
конец являются асинхронными. Для
упрощения управления шиной длина цикла
составляется из временных квантов
одинаковой продолжительности, называемых
тактом шины. Во время любого такта цикла
шины выполняются определенные действия,
которые можно разбить на две группы:
установление состояния шины и выполнение
команд, предписанных реализуемым
механизмом передачи.
Пакетный режим передачи. Адрес передается один раз, после чего передается пакет данных с линейно-возрастающими адресами. Количество циклов данных в пакете заранее определено, но перед последним циклом инициатор обмена при введенном сигнале разрешения обмена (IRDY#) снимает специальный сигнал пакетной передачи (FRAME#). После последней фазы данных инициатор снимает сигнал IRDY# и шина переходит в состояние покоя. Это стандартный режим работы шины PCI.
Конвейеризация обращений к памяти. Данный режим используется в высокоскоростных шинах (AGP). При неконвеиризированых обращениях шины во время реакции памяти на запрос шина простаивает. Конвейерный доступ позволяет в это же время передавать следующие запросы, а потом получить полный поток передаваемых данных. Спецификация AGP предусматривает возможность постановки в очередь до256 запросов, при этом поддерживает две пары очередей для операций записи и чтения памяти с высоким и низким приоритетом.
Сдвоенные передачи данных обеспечивают повышение пропускной способности шины в 2 раза без изменения тактовой частоты шины. Суть сдвоенной передачи в том, что блоки данных передаются, как по фронту так и по спаду сигнала синхронизации (в AGP в шине ATA в режиме UltraDMA-33).
1.20. РОЗПОДІЛЕННЯ СИСТЕМНИХ РЕСУРСІВ МІЖ КОМПОНЕНТАМИ ПК. Технологія PnP та її РЕАЛІЗАЦІЯ В ШИНАХ PCI та ISA/EISA.
Наиболее распространенными для подключения карт расширения PC являются шины ISA и PSI. В шину PSI заложены возможности автоматического конфигурирования установленных адаптеров. Спецификация шины ISA требует, чтобы всем картам назначались свои системные ресурсы – области адресов в пространствах памяти и ввода/вывода, линии запросов прерываний и каналы прямого доступа к памяти. При этом по используемым ресурсам платы не должны конфликтовать. Шина ISA не имеет механизмов автоматического конфигурирования и распределения ресурсов, так что все заботы по конфигурированию устанавливаемых адаптеров и разрешению конфликтов ложится на пользователя. Задача конфигурации осложняется и из-за отсутствия общего механизма автоматической передачи установленных параметров прикладному и системному программному обеспечению. После конфигурирования адаптеров, установленные параметры заносятся в какие-либо конфигурационные файлы. При необходимости смены конфигурации всю роботу по конфигурированию приходится проводить повторно.
Некоторое облегчение конфигурирования принесло применение в адаптерах энергонезависимой памяти (NVRAM или ее разновидности - EEPROM), хранящей конфигурации настроек, в том числе и использования системных ресурсов. Конфигурирование этих адаптеров выполняется программно специальной утилитой, а не с помощью джамперов. Во время конфигурирования утилита может проверить выбираемые установки на наличие конфликта. Преимуществом конфигурирования с помощью NVRAM является и то, что программный драйвер, «знающий» данную карту, сумеет прочитать и сделанные установки, так что необходимость в конфигурационных файлах отпадает.
Однако это еще не решение проблемы автоконфигурирования в полном объеме. Ключевым моментом в автоконфигурировании является возможность на начальном этапе конфигурирования изоляции каждой карты от всех остальных. Тогда программные средства конфигурирования смогут вести с картой корректный диалог, на который не влияет присутствие других карт. Кроме того необходимо обеспечить единый метод двустороннего обмена конфигурационной информацией между картой и программным обеспечением. Возможность изоляции карт при конфигурировании заложена в шины MCA, PCI и EISA. В EISA для каждого слота возможно программное селективное управление сигналом AEN, запрещающим дешифрацию адресов портов ввода/вывода. Кроме того, в системе с шиной EISA имеется дополнительная энергонезависимая память конфигурирования слотов. В шине ISA все сигналы всех слотов соединяются параллельно, а хранилище конфигурационной информации не предусмотрено.
Мосты PCI – аппаратные средства подключения шины PCI к другим шинам. Host Bridge – главный мост – используется для подключения к системной шине. Peer-to-Peer Bridge – одноранговый мост – используется для соединения двух шин PCI. При конфигурировании мостов им указывается распределение системных ресурсов по шинам, которые они связываются. Таким образом задаются пути транслирования управляющих сигналов по шинам и управление буферами данных, обеспечивая для каждого адреса памяти или ввода/вывода единственную шину назначения, по крайней мере для операций чтения.
Среди устройств PnP выделяется класс динамически конфигурируемых устройств DCD. Ресурсы, используемые ими, могут динамически переназначаться во время работы, не требуя перезагрузки операционной системы. К этому классу относятся устройства PnP ISA и PCI. Устройство DCD может находится в заблокированном состоянии, тогда ресурсы не могут быть изменены до разблокирования.
Решением задачи изоляции карт ISA, программного распределения системных ресурсов, конфигурирования и передачи параметров операционной системе и прикладному ПО является спецификация компании Intel и Microsoft Plug and Play «ISA Specification». Вышеперечисленные задачи решаются для карт PnP, которые могут работать и в окружении более старых карт.
Конфигурирование в системе PnP состоит из следующих шагов: Производится изоляция одной карты от всех остальных; Карте назначается CSN (Card Select Number), с помощью которых могут работать дальнейшие команды PnP; С карты считываются данные о сконфигурированных и поддерживаемых ресурсах. Эти шаги повторяются для всех карт, после чего: Производится распределение системных ресурсов, выделяемых каждой карте; Каждая карта конфигурируется согласно выбранному распределению ресурсов и активируется.
Все шаги конфигурирования выполняет POST, если BIOS имеет поддержку PnP, или операционная система при загрузке. PnP BIOS может ограничится конфигурированием и активацией только устройств, участвующих в загрузке, оставляя конфигурирование и активацию дополнительных устройств операционной системе.
Для конфигурирования карт PnP, необходимо внести всего три 8-битных системных порта, с которыми процессор может общатся, применяя инструкции ввода/вывода с однобайтной передачей данных. Карты PnP должны использовать 12-битное декодирование адреса ввода/вывода а не 10-битное, как принято в традиционных картах ISA.
Порт ADDRESS (0279h, только запись) используется для адресации регистров PnP, запись в него производится перед обращением к портам WRITE_DATA и READ_DATA. Этот же порт используется и для записи последовательности кодов ключа инициализации. Выбор адреса для него обусловлен тем, что ни одна разумно сделанная карта не будет пытаться использовать для записи адрес регистра состояния стандартного LPT-порта.
Порты WRITE_DATA (0А79h, только запись) и READ_DATA (перемещаемый в диапазоне 0203h-03FFh, только чтение) используются для обмена данными с регистрами PnP. Адрес порта WRITE_DATA картами с 10-битным декодированием будет восприниматься как тот же адрес, что и у предыдущего порта, так что конфликт исключен. Перемещаемому адресу порта READ_DATA программное обеспечение PnP во время исполнения протокола изоляции может легко найти бесконфликтное положение. Адрес этого порта сообщается всем картам записью в их управляющий регистр PnP.
В конфигурационный режим логика PnP переводится с помощью ключа инициализации. Ключ представляет собой последовательность записей в порт ADDRESS. Аппаратная логика карты, проверяющая ключ, основана на сдвиговом регистре с обратными связями LFSR.
Протокол изоляции основан на уникальном идентификаторе Serial Identifier, хранящемся в памяти каждой карты PnP. Этот идентификатор представляет собой ненулевое 72-битное число, состоящее из двух 32-битных полей и 8-битного контрольного кода, вычисляемого с помощью регистра LFSR. Первое 32-битное поле – идентификатор производителя. Второе поле назначается производителем уникально для каждого экземпляра всех выпускаемых им карт. Доступ к идентификатору осуществляется последовательно, начиная с бита 0 нулевого байта идентификатора производителя и заканчивая битом 7 контрольной суммы. Протокол изоляции может быть программно инициирован в любой момент времени посылкой конкретного ключа инициализации, переводящего все карты в конфигурационный режим. В этом режиме карта ожидает 72 пары операций чтения порта READ_DATA. Ответ каждой карты на эти операции определяется значением очередного бита ее последовательного идентификатора.
Программа конфигурирования проверяет данные, возвращаемые во время всех пар циклов чтения, и побитно собирает идентификатор. Если при переборе нескольких возможных адресов не удается считать корректного идентификатор, то принимается решение об отсутствии карт PnP в системе (вообще или с неназначенным CSN).
По завершении протокола изоляции программное обеспечение имеет список идентификаторов, сообщенных и самим картам. Далее общение программы с каждой картой идет по ее селективному номеру CSN, фигурирующему в командах PnP. Нулевой CSN присваивается картам по программному или аппаратному сбросу и используется как широковещательный адрес.
Обращения к регистрам PnP представляют собой операции записи или чтения портов ввода/вывода по адресам WRITE_DATA или READ_DATA соответственно. При этом для указания конкретного регистра PnP используется индекс – номер этого регистра, предварительно записанный в ADDRESS.
Каждая карта имеет стандартный набор регистров PnP, причем часть из них относится к карте в целом, а часть – к каждому устройству, входящему в карту. В любой момент времени в индексном пространстве регистров PnP отображаются общие регистры карты и регистры только одного логического устройства. Выбор логического устройства осуществляется записью в регистр Logical Device Number, входящий в группу управляющих регистров карты.
С точки зрения PnP карта может перебывать в нескольких состояниях. Isolate, Config (с помощью команды WAKE[CSN]), при этом все другие карты переходят в режим Sleep. Программирование каждого логического устройства завершается установкой его бита активации на шине ISA, а всей карты – переводом ее в состояние Wait for key. После перехода всех карт в это состояние их случайное реконфигурирование будет блокировано 32-байтным ключом. Доступ к регистрам PnP возможен через ключ в любое время, но запись в них должна производится в полной уверенности о знании последствий.
Каждое логическое устройство имеет собственные дескрипторы используемых системных ресурсов: дескрипторы памяти, дескрипторы областей ввода/вывода, дескрипторы запросов прерываний, дескрипторы каналов прямого доступа к памяти.
1.21. ЗАСОБИ КЕШУВАННЯ МП. ПРИЗНАЧЕННЯ ТА ХАРАКТЕРИСТИКИ. ТИПИ КЕШ-ПАМ'ЯТІ. РЕЖИМИ РОБОТИ ПРИ ЧИТАННІ/ЗАПИСУВАННІ ІНФОРМАЦІЇ.
Кэш является дополнительным и быстодействующим хранилищем копий блоков информации основной памяти. Он хранит лишь ограниченное количество блоков даных и каталог – список их текущего соответствия областям основной памяти. Кроме того, кэшироваться может не вся память, доступная процессору (обычно основная динамическая память системной платы). При каждом обращении к кэшируемой памяти контроллер кэш-памяти по каталогу проверяет, есть ли действительная копия затребованых даных в кэше. Если она там есть, то это случай кэш-попадания, и обращение за даными происходит только из кэш-памяти. В противном случае это кэш-промах и данные берутся из основной памяти. В соответствии с алгоритмом кэширования блок даных, считаный из основной памяти при определенных условиях, заменит один из блоков кэша. Обращение к основной памяти может начатся одновременно с поиском в каталоге, а в случае попадания – прерваться (архитектура Look Aside). Это экономит время, но приводит к излишнему энергопотреблению. Друго вариант – обращение к основной памяти начинается после промаха (архитектура Look Through).
В современных компьютерах кэш обычно строится по двухуровневой системе. Первичный кэш встроен в процессор и работает на внутренней тактовой частоте процессора. Для повышени производительности для данных и команд часто используется раздельный кэш. Вторичный кэш обычно устанавливается на системной плате и работает на внешней тактовой частоте процессора – частоте системной шины.
Кэш-контроллер обеспечивает когерентность – согласованость данных кэш-памяти обоих уровней с данными основной памяти. Контроллер оперирует строками фиксированной длины, которая может хранить копию основного блока памяти. С каждой строкой кэша связана информация об адресе скопированого в нее блока памяти и признаки ее состояния. Строка может быть действительной или пустой. Информация о том, какой именно блок занимает строку и ее состояние называется тэгом и хранится в связанной с данной строкй памяти тэгов. Возможен вариант секторированого кэш, при котором одна строка содержит несколько смежных ячеек – секторов, размер которых соответствует минимальной порции обмена даных кэша с основной памятью. Поведение кэш-контроллера при операции записи в память, когда копия затребованой области находится в строке кэша, определяется политикой записи. Существует два основных алгоритма записи дааных из кэша в основную память: сквозная запись WT (Write Through) и обратная запись WB (Write Back).
WT предусматривает выполнение каждой операции записи, попадающей в кэшированный блок, одновременно и в строку кэша и основную память. При этом процессору при каждой записи придется ожидать окончания относительно длительной записи в основную память. Алгоритм прост в реализации, но обладает низкой эффективностью записи.
WB позволяет уменшить количество операций записи на шине основной памяти. Если блок памяти, в который должна производиться запись, отображен и в кэше, то физическая запись будет произведена в эту действительную стоку кэша, и она будет отмечена как грязная, т.е. требующая выгрузки в основную память. Только после этой выгрузки строка станет чистой. В основную память данные переписываются только целой строкой или непосредственно перед ее замещением в кэше новыми даными.
В зависимости от определения взаимного соответствия строки кэша и области основной памяти различают три архитектуры кэш-памяти: кэш прямого отображения, полностью ассоциативный кэш и частично-ассоциативный кэш.
1.22. ПРИЗНАЧЕННЯ ТА ОРГАНІЗАЦІЯ СИСТЕМНОЇ ПАМ'ЯТІ. ФІЗИЧНА ОРГАНІЗАЦІЯ МІКРОСХЕМ ПЗП, СТАТИЧНОГО ТА ДИНАМІЧНОГО ОЗП. ТИПИ ДИНАМІЧНОЇ ПАМ’ЯТІ (FPM, EDO, BEDO, SDRAM).
Оперативная память компьютера используется для оперативного обмена информацией между процессором, внешней памятью и периферийными подсистемами. Данная память обладает произвольностью доступа, т.е. возможность операций записи или чтения с любой ее ячейки в произвольном порядке. Требования к ОЗУ: большой объем, быстродействие и производительность, высокая надежность хранения данных.
Кэш-память – сверхоперативная память, является буфером между ОЗУ и процессором или другими абонентами системной шины. Кэш хранит копии блоков данных тех областей ОЗУ, к которым происходили последние обращения, и последующее обращение к тем же данным будет обслужено кэш-памятью существенно быстрее, чем оперативной памятью. В современных компьютерах кэш строится по двухуровневой системе.
Постоянная память (ПЗУ) используется для энергонезависимого хранения системной информации – BIOS, таблиц знакогенераторов и т.п. При обычной работе компьютера она только считывается, а запись в нее осуществляется специальными устройствами – программаторами. Объем ПЗУ небольшой, быстродействие ниже чем у ОЗУ. Для повышения производительности содержимое ПЗУ копируется в ОЗУ, и при работе используется только эта копия – теневая память. Существует также такие виды постоянной памяти как EEPROM и флеш-пямять, запись в которые возможна и в самом компьютере в специальном режиме работы.
Полупостоянная память в основном используется для хранения информации о конфигурации компьютера (CMOS Memory и CMOS RTS). Сохранность данных полупостоянной памяти при отключен питания обеспечивается маломощной внутренней батарейкой или аккумулятором. Также применяется энергонезависимая память NV RAM, которая хранит информацию и при отсутствии питания.
Существуют также такие виды памяти, как буферная память и видеопамять.
Динамическая память DRAM выполнена в виде конденсаторов, образованных элементами полупроводниковых микросхем.. При записи логической единицы в ячейку конденсатор заряжается, при записи нуля – разряжается. Схема считывания разряжает через себя этот конденсатор, и, если заряд был не нулевым, выставляет на своем выходе единичное значение, и подряжает конденсатор до прежнего значения. Такая память требует периодического подзарядки – регенерации - конденсаторов во избежания потери данных. Запоминающие ячейки микросхем DRAM организованы в виде двумерной матрицы. Адрес строки и столбца передается по мультиплексированной шине адреса MA (Multiplex Address) и стробируется по спаду импульсов RAS# (Row Access Strobe) и CAS# (Column Access Strobe).
Статическая память – SRAM, способна хранить информацию сколь угодно долго при отсутствии обращений (но при наличии питания). Ячейки статической памяти реализуются на триггерах – элементах с двумя устойчивыми состояниями. Эти ячейки занимают больше места на кристалле, но проще в управлении и не требуют регенерации.
Типы динамической памяти: FTM (Fast Page Mode) – режим быстрого страничного обмена. Преимущество данного режима заключается в экономии времени за счет исключения фазы выдачи адреса строки из циклов, следующих за первым, что позволяет повысить производительность памяти.
EDO (Extended Data Out) DRAM. Эта память содержит регистр-защелку выходных данных, что обеспечивает некоторую конвейеризацию работы для повышения производительности при чтении. Регистр прозрачен при низком уровне сигнала CAS#, а по его подъему фиксирует текущее значение выходных данных до следующего его спада. Отличие этого режима от стандартного заключается в подъеме импульса CAS# до появления действительных данных на выходе микросхемы. Считывание выходных данных может производится внешними схемами вплоть до спада следующего импульса CAS#, что позволяет экономит время за счет сокращения длительности импульса CAS#.
BEDO (Burst EDO) DRAM. В микросхемах данного типа кроме регистра-защелки выходных данных, содержится еще и внутренний счетчик адреса колонок для пакетного цикла, а во 2-й, 3-й и 4-й передачах импульсы CAS# только запрашивают очередные данные. В результате удлинения конвейера выходные данные отстают на один такт CAS#, зато следующие данные появляются без тактов ожидания процессора.
SDRAM (Synchronous DRAM) – быстродействующая синхронная динамическая память, работающая на частоте системной шины без тактов ожидания внутри пакетного цикла. От обычной динамической памяти, у которой все внутренние процессы инициируются только сигналами RAS#, CAS# и WE#, память SDRAM отличается использованием постоянного присутствующего сигнала тактовой частоты системной шины. Это позволяет создавать внутри микросхемы высокопроизводительный конвейер на основе ячеек динамической памяти с обычным временем доступа (50-70нс). Микросхемы SDRAM являются устройствами с программируемыми параметрами, со своим набором команд и внутренней организацией чередования банков.
1.23. АРХІТЕКТУРА ТА ПРИНЦИП РОБОТИ ГОДИННИКА РЕАЛЬНОГО ЧАСУ RTC ТА CMOS ПАМ'ЯТІ. МОЖЛИВОСТІ ПРОГРАМУВАННЯ.

В состав IBM PC AT входят часы реального времени Real Time Clock (RTC) и 64 байта неразрушающейся оперативной КМОП памяти (CMOS), питающиеся от автономного источника питания. При включении ПЭВМ содержимое CMOS анализируется POST, который извлекает из нее конфигурацию системы и текущие дату и время. Часы реального времени RTC и CMOS память выполнены на базе микросхемы МС146818 фирмы Motorola, упрощенная структурная схема которой представлена на рис. 1.
Назначение сигналов следующее:
-CE - разрешение кристалла (выход дешифратора адреса);
DS - строб данных;
AS - адресный строб;
R/W - чтение/запись;
SQW - выходные прямоугольные импульсы – меандр (в IBM PC AT не используются);
IRQ - запрос на прерывание от RTC;
PS - сигнал состояния питания (используется для контроля достоверности данных);
CKOUT - синхросигнал, который может использоваться как входной синхросигнал микропроцессора.
Основная часть RTC - задающий генератор (внутренний или внешний) с частотой 4.194304 МГц, 1.048576 МГц и делитель частоты, у которого выход последнего каскада (1 Гц) управляет часами.
Для доступа к данным CMOS используются порты 70h и 71h, причем адрес регистра подается в 70h порт, а данные читаются/пишутся через 71h порт.
Адреса CMOS с 10h по 20h защищены контрольной суммой, хранящейся по адресам 2Eh-2Fh. Поэтому изменения содержимого этих адресов необходимо сопровождать пересчетом и изменением контрольной суммы.
Порт 70h применяется не только для задания адреса CMOS, но и для разрешения или запрещения NMI (немаскируемого прерывания). Если бит 7 равен 0, то NMI разрешается, если 1 - запрещается.
Все данные RTC хранятся в двоично - десятичном формате (BCD). Байты будильника 1h, 3h, 5h служат для создания времени выработки сигнала прерывания от RTС. Каждый байт может содержать конкретное значение времени (секунды и минуты в пределах 0-59, а часы в пределах 0-23) и "безразличное" значение - код в пределах C0h-FFh, т.е. два старших разряда содержат 1.
При конкретном задании времени прерывание вырабатывается раз в сутки (2 раза при 12-ти часовом времени). Если байт часов содержит "безразличный" код, прерывание каждый час; если байт часов и минут "безразличны", прерывание каждую минуту; и при всех "безразличных" байтах - каждую секунду.
0Ah - Регистр A состояния RTC:
0Bh - Регистр B состояния RTC:
0Ch - Регистр С состояния RTC: биты состояния прерываний, только для чтения. При чтении из регистра все разряды сбрасываются.
0Dh - Регистр D состояния RTC. Бит 7=1, если CMOS получает питание; 0=нет питания от автономного источника.
0Eh - Байт результатов начального тестирования:
0Fh - Байт состояния перезагрузки. Этот байт считывается после сброса ЦП, чтобы определить не был ли сброс вызван для вывода 80286 из защищенного режима.
1.24. АРХІТЕКТУРА СИСТЕМНОГО ТАЙМЕРА ТА ПРИЗНАЧЕННЯ КАНАЛІВ ТАЙМЕРА. РЕЖИМИ РОБОТИ КАНАЛІВ ТАЙМЕРА. МОЖЛИВОСТІ ПРОГРАМУВАННЯ.
Все компьютеры IBM содержат 3-х канальное 16-ти разрядное устройство, называемое системным таймером. Таймер реализуется на микросхеме Intel 8253 (для IBM PC и IBM XT) или 8254 (для IBM AT и IBM PS/ 2). Структурная схема системного таймера представлена на рис. 5.1.

Таймеры 8253 и 8254 состоят из трех независимых каналов. Каждый канал содержит регистры:
-состояния канала RS (8 разрядов);
-управляющего слова PSW (6 разрядов);
-буферный регистр OL (16 разрядов);
-регистр счетчика CE (16 разрядов);
-регистр констант пересчета CR (16 разрядов).
Каналы таймера подключаются к внешним устройствам при помощи трех линий:
GATE - управляющий вход;
CLOCK - вход тактовой частоты;
OUT - выход таймера.
Регистр счетчика CE работает в режиме вычитания. Его содержимое уменьшается по заднему фронту сигнала CLOCK при условии, что на входе GATE установлен уровень логической 1. В зависимости от режима работы таймера при достижении счетчиком CE нуля тем или иным способом меняется выходной сигнал OUT. Буферный регистр OL предназначен для запоминания текущего содержимого регистра счетчика CE без остановки процесса счета. После запоминания буферный регистр доступен программе для чтения. Регистр констант пересчета CR предназначен для хранения констант пересчета и может загружаться в регистр счетчика, если это требуется в текущем режиме работы таймера. Содержимое регистра CR изменяется только при перезагрузке счетчика или при перепрограммировании режима (записи управляющего слова). При перепрограммировании содержимое CR устанавливается в нуль. Регистр состояния канала RS хранит текущее состояние канала и может быть прочитан для выбранного канала командой "обратное чтение".Регистр управляющего слова PSW хранит управляющую информацию канала и задает его режим работы до следующего перепрограммирования. Системный генератор импульсов (СГИ) независимо от типа и производительности компьютера IBM вырабатывает импульсы одной и той же частоты - 1 193180 Гц.
В компьютерах IBM PC/XT/AT/PS2 задействованы все три канала таймера.
Канал 0 используется в системных часах времени суток. Этот канал работает в режиме 3 (описание режимов см. в п.5.2.) и используется как генератор импульсов с частотой примерно 18,2 Гц. Канал 1 используется для регенерации содержимого динамической памяти компьютера, поэтому его лучше не трогать. Выходная линия канала OUT связана с микросхемой прямого доступа к памяти (DMA), и ее импульс заставляет DMA регенерировать память. Канал использует режим 2 таймера. Канал 2 связан с громкоговорителем (динамиком) компьютера и может быть использован для генерации различных звуков или музыки либо как генератор случайных чисел. Канал использует режим 3 таймера.
Каждый канал таймера может работать в одном из шести режимов.
Режим 0 - прерывание терминального счета. После загрузки PSW сигнал OUT устанавливается в 0. Запись константы не влияет на OUT. Счет разрешается сигналом GATE=1 и запрещается GATE=0. При GATE=1 и фронту первого CLK константа счета N загружается из CR в CE, а по второму CLK начинается счет. OUT удерживается в нуле до конца счета, т.е. на время (N+1)*T сек. после чего возвращается в 1. Изменение GATE не влияет на OUT, но при GATE=0 счет приостанавливается, а при GATE=1 возобновляется без перезагрузки CE. Загрузка нового управляющего слова при новой константе возобновляет цикл.
Режим 1 - программируемый ждущий мультивибратор. На выходе OUT формируется сигнал низкого уровня длительностью T=Tclk*N (N - константа пересчета; Tclk - период синхроимпульсов). Счет начинается (OUT устанавливается в 0) по положительному фронту GATE, и OUT становится равен 1 по завершению счета. Данный режим является режимом с перезапуском, т.е. по каждому положительному фронту GATE содержимое CR передается в CE и перезапускает его, даже если предыдущий счет не завершен до конца. Загрузка во время счета новой константы не влияет на длительность текущего импульса до новой перезагрузки.
Режим 2 - импульсный генератор частоты. Канал выполняет функцию программируемого делителя входной частоты Fclk . Сразу после загрузки PSW выход OUT становится равным 1 и при удержании GATE=1 сигнал OUT держится в состоянии 1 в течении времени (N-1)*Tclk, после чего переходит в 0 и удерживается в этом состоянии на время Tclk. По окончании указанного цикла выполняется автозагрузка CE из CR и цикл повторяется. При подаче GATE=0 OUT устанавливается в 1, счет прекращается и возобновляется при GATE=1 с начального значения. При загрузке новой константы в CR во время счета текущий цикл не меняется, изменится длительность следующего цикла.
Режим 3 - генератор меандра. Режим аналогичен режиму 2, но на выходе формируются импульсы длительностью полупериода N/2*Tclk при четном N. При нечетном N положительный импульс (OUT=1) имеет длительность (N+1)/2*Tclk, а отрицательный импульс(OUT =0) имеет длительность (N-1)/2*Tclk. Генератор не работает,если N=3.
Режим 4 - программно формируемый строб. Сигнал OUT устанавливается равным 1 после загрузки PSW и удерживается до конца счета, после чего на выходе OUT устанавливается 0 на период Tclk и возвращается в 1, т.о. цикл работы имеет длительность (N+1)*Tclk сек. По действию сигнала GATE и режиму работы (однократное выполнение функции) он аналогичен режиму 0.
Режим 5 - аппаратно формируемый строб. По выходному сигналу режим аналогичен режиму 4 (OUT=1 после загрузки PSW до конца счета и OUT=0 в течении Tclk после окончания счета), а по действию GATE режиму 1, т.е. запуск счета выполняется по переднему фронту сигнала GATE.
Каждый канал таймера программируется отдельно и независимо от других. При программировании канала необходимо послать ему управляющее слово (старшие 2 разряда управляющего слова указывают номер канала, а остальные 6 разрядов защелкиваются в регистре PSW выбранного канала), после чего загружается регистр констант пересчета CR. Так как 16-ти разрядные регистры констант CR отображаются через 8-ми разрядные порты, то загрузка CR выполняется в соответствии с указаниями управляющего слова. Таймеру соответствуют 4 порта ввода/вывода со следующими адресами: 40h - канал 0; 41h - канал 1; 42h - канал 2; 43h - управляющее слово.
1.25. АРХІТЕКТУРА ТА ОРГАНІЗАЦІЯ ПІДСИСТЕМИ DMA (КПДП) В ПК. КЕРУЮЧА ІНФОРМАЦІЯ ТА ПРОГРАМУВАННЯ.
Прямой доступ к памяти DMA – метод обмена данными периферийного устройства с памятью без участия процессора.
IBM PC XT и XT-совместимые ПЭВМ имеют один 4-канальный контроллер DMA 8237А. Назначение каналов следующее:
0 - обмен память-память; 1 - свободен (может использоваться сетевыми адаптерами); 2 - обмен с контроллером гибких дисков; 3 - обмен с контроллером жестких дисков.
В се
4 канала выполняют побайтовую передачу
данных с 8-разрядными портами обслуживаемых
устройств (максимальный размер блока64
Кбайт). IBM PC AT и AT-подобные ПЭВМ имеют
два контроллера DMA 8237А, работающие в
каскадном режиме (см. рис. 1).
се
4 канала выполняют побайтовую передачу
данных с 8-разрядными портами обслуживаемых
устройств (максимальный размер блока64
Кбайт). IBM PC AT и AT-подобные ПЭВМ имеют
два контроллера DMA 8237А, работающие в
каскадном режиме (см. рис. 1).
Для сохранения преемственности с ХТ-компьютерами каналы 1-й микросхемы номеруются 0-3, а каналы 2-ой микросхемы номеруются как 4-7 и предназначены для обмена данными с 16-разрядными портами обслуживающих устройств (максимальный размер блока 128 Кбайт при обмене 16-разрядными словами только по четной границе адреса).
Назначение каналов следующие:
0 - свободен; 1 - адаптер SDLC; 2 - контроллер накопителей на гибких дисках; 3 - контроллер накопителей на жестких дисках; 4 - каскад с первым контроллером DMA; 5, 6, 7 - свободны.
Так как цепочечные команды микропроцессоров 80286 и выше более быстродействующие, то они используются при обмене данных с жесткими дисками и канал 3 первой микросхемы освободился.
Управление каналами 0 - 3 осуществляется аналогично PC/ХТ. Каналы 4 - 7 предназначены для обмена 16-разрядными словами. В связи с этим возникает ряд отличий в работе с этими каналами:
- бит 0 в данных, заносимых в регистры начального и текущего адреса, всегда подразумевается равным 0, поэтому через эти регистры передаются биты 1 - 16 полного 23-разрядного адреса (а не биты 0 - 15 полного 20-разрядного адреса, как это реализовано на ХТ-подобных ПЭВМ), по этой же причине в страничные регистры каналов 4 - 7 заносятся биты 17 - 23 полного адреса, а не биты 16 - 23, как это надо сделать при работе с каналами 0 - 3;
- поскольку передача осуществляется 16-разрядными словами, в регистры текущего и начального счетчика циклов заносится не число байт, а число слов, уменьшенное на единицу;
- размеры страниц памяти, в пределах которых возможен обмен в течение одной передачи составляют 20000h байтов.
Программное управление контроллером DMA осуществляется через порты ввода-вывода. Доступ к каждому регистру контроллера может быть осуществлен через свои порты ввода-вывода.
Порты 0h-7h для DMA1 (C0h-CEh для DMA2; далее будут указываться порты DMA1) предназначены для записи исходных значений в регистры начального и текущего адреса, начального и текущего счетчика циклов для всех 4-х каналов. Так как порты восьмиразрядные, а регистры, в которые через них заносятся данные, 16-разрядные, то запись производится в два приема. Перед первой командой вывода в требуемый порт необходимо сбросить триггер-защелку, для чего выполняется команда вывода произвольного значения в порт Ch, после чего в требуемый порт выводится младший байт 16-разрядного значения и затем старший байт следующей команды вывода в тот же порт. Запись в порт 8h инициализирует команду DMA.
Запись в порт Bh устанавливает значение в регистре режимов одного из 4-х каналов DMA. Биты 0 и 1 задают номер канала (00 - 0, 01 - 1, 10 - 2, 11 - 3). В биты 2 - 7 заносятся значения, передаваемые соответственно в биты 0 - 6 регистра режимов.
Запись в порт Dh задает программный сброс контроллера (Master Clear). Вывод любого байта в этот порт имеет тот же эффект, что и аппаратный сброс контроллера. При программном сбросе очищаются регистры команд, состояния, запросов и рабочий регистр. Так же сбрасывается триггер-защелка и устанавливается все
биты масок в регистре масок. После программного сброса контроллер переходит в цикл ожидания.
Вывод любого байта в порт Eh очищает регистр масок - сбрасывает биты масок всех 4-х каналов DMA и таким образом разрешает прием запросов на DMA по всем каналам.
Через порт Fh можно задать произвольное значение регистра масок DMA. Для этого необходимо в битах 0 - 3 передаваемого байта установить требуемое значение масок каналов 0 - 3 соответственно и вывести это значение в порт.
Страничные регистры DMA предназначены для задания номера страницы памяти, с которой будет производится обмен. Под номером страницы понимаются старшие 4 бита полного 20-битового адреса ОЗУ, т.е. начальные сегментные адреса страниц будут кратны 10000h (0, 10000h, 20000h, ..., 90000h). Напомним, что архитектура DMA позволяет работать только со страницей памяти размером 64 К, а логика, обеспечивающая переключение страниц устроена так, что страницы имеют жесткие границы. Из-за этой особенности невозможно с помощью DMA осуществить обмен с блоками памяти, пересекающими границу между двумя такими страницами.
1.26. ОРГАНІЗАЦІЯ ПЕРЕРИВАНЬ В ПК, ПРІОРИТЕТИ ПРИ ОБРОБЦІ ПЕРЕРИВАНЬ. РЕЖИМИ РОБОТИ ТА ПРОГРАМУВАННЯ.
Для обработки событий, происходящих асинхронно по отношению к выполнению программы, лучше всего подходит механизм прерываний. Прерывание можно рассматривать как некоторое особое событие в системе, требующее моментальной реакции. Например, хорошо спроектированные системы повышенной надежности используют прерывание по аварии в питающей сети для выполнения процедур записи содержи мого регистров и оперативной памяти на магнитный носитель, с тем чтобы после восстановления питания можно было бы продолжить работу с того же места.
Поскольку прерывания возможны самые разнообразные по самым различным причинам, каждому прерыванию присваивается номер прерывания. С каждым номером прерывания связывается то или иное событие. Система умеет распознать какое прерывание, с каким номером произошло, и запускает соответствующую этому номеру процедуру.
1) Типы прерываний. По источнику и характеру возникновения прерывания можно разделить на группы (рис.1):

Программные прерывания вызывают сами программы, поэтому они не являются асинхронными. Для этого они используют команду INT.
Программные прерывания удобно использовать для организации доступа к отдельным общим для всех программ модулям. Прикладные программы сами могут устанавливать свои обработчики прерываний для их последующего использования другими программами. Для этого встраиваемые обработчики прерываний должны быть резидентными в памяти.
Аппаратные прерывания вызываются физическими устройствами и приходят асинхронно. Эти прерывания информируют систему о событиях, связанных с работой устройств.
Внутренние (логические) прерывания формируются самим процессором, когда он встречается с некоторыми особыми событиями вроде деления на 0. Это прерывания с номерами 0, 1, 3, 4. Внешние аппаратные прерывания вызваны сигналами, внешними по отношению к центральному процессору, и подаются на его входы INT и NMI.
Прерывания по входу INT относятся к аппаратным маскируемым прерываниям, поскольку могут быть разрешены или запрещены флагом IF регистра флагов. Обработку аппаратных маскируемых прерываний выполняют контроллеры прерываний, которые принимают запросы на прерывание от нескольких устройств, назначают им приоритеты, выбирают наиболее приоритетные и прерывают работу процессора по входу INT. Номер вектора прерываний маскируемых прерываний передается в процессор по его восьми младшим разрядам шины данных.
Вход немаскируемого прерывания NMI обычно используется для сообщений о "катастрофических" событий (отключении питания, обнаружении ошибок памяти и т.д.). Номер этого прерывания равен 2. Так как номер немаскируемого прерывания заведомо известен, то он не передается в процессор и обработка этого прерывания начинается быстрее, чем обработка маскируемых прерываний. Запрос на прерывание NMI маскируется установкой в 1 старшего 7-го бита порта 70h. При этом остальные биты (6-й бит всегда равен 0, а биты 5 - 0 задают адрес CMOS памяти /см. раздел 4/) должны остаться без изменения. Приоритет NMI выше всех маскируемых прерываний.
2) Таблица векторов прерываний (реальный режим работы). Для того чтобы связать номер прерывания с адресом программы обработки прерываний (обработчика прерываний), используется таблица векторов прерываний, занимающая первый килобайт оперативной памяти - адреса от 0000:0000h до 0000:03FFh. Таблица состоит из 256 элементов - FAR-адресов обработчиков прерываний. Эти элементы называются векторами прерываний. В первом слове элемента таблицы записано смещение, а во втором - сегмент адреса обработчика прерываний. Инициализация таблицы происходит частично программой POST после тестирования аппаратуры, частично при загрузке DOS. DOS может переключить на себя некоторые прерывания BIOS.
3) Обработка прерываний. Несмотря на многообразие типов прерываний алгоритм обработки прерывания процессором один и тот же. N - номер вектора прерывания → поместить в стек регистр флагов → обнулить флаги IF и TF → поместить в стек значение регистра CS → присвоить адресу вектора прерывания значение N*4 → загрузить второе слово вектора прерываний в регистр CS → поместить в стек значение IP → загрузить первое слово вектора прерываний в указатель команд IP → выполнить действия по обслуживанию данного прерывания → извлечь из стека значение и загрузить в указатель команд IP → извлечь из стека значение и загрузить в регистр сегмента команд CS → извлечь из стека значение и загрузить в регистр флагов → Конец.
4) Изменение таблицы векторов прерываний. Если программе потребуется изменить обработку некоторых прерываний, то для этого необходимо переназначить требуемый вектор прерываний на свой обработчик. Это можно сделать, изменив содержание соответствующего элемента таблицы векторов прерываний.
5) Коррекция системных обработчиков прерываний. Если необходимо добавить какие-либо собственные действия к тем, что выполняет стандартный обработчик прерывания, то можно организовать цепочку прерываний.
Программируемый контроллер прерываний ( Programmable Interrupt Controller, PIC) реализуется на микросхеме 8259А фирмы Intel (отечественный аналог КР580ВН59), и на ее модификациях 8259А-2 и 8259А-8, поддерживает 8 уровней прерываний от восьми различных устройств. Основные функции контроллера:
- фиксация запросов на прерывания от восьми внешних источников;
- программное маскирование поступающих запросов;
- присвоение фиксированных или циклически изменяемых приоритетов входам контроллера, на которые поступают запросы;
- инициализация вызова процедуры обработки поступившего аппаратного прерывания.
1.27. АРХІТЕКТУРА ТА ПРИНЦИП РОБОТИ ПІДСИСТЕМИ КЛАВІАТУРИ. ПРИЗНАЧЕННЯ КОМПОНЕНТ. ТА МОЖЛИВОСТІ ПРОГРАМУВАННЯ.
Клавиатура PC представляет собой унифицированное устройство со стандартным разъемом и последовательным интерфейсом связи с системной платой. В качестве датчиков нажатия клавиш применяют механические контакты, кнопки на основе токопроводящей резины, емкостные датчики и датчике на эффекте Холла. Независимо от типов применяемых датчиков нажатие клавиш, все они объединяются в матрицу. Клавиатура содержит внутренний контроллер осуществляющий сканирование матрицы клавиш, управление индикаторами, внутреннюю диагностику и связь с системной платой последовательным интерфейсом по линиям KB-Data и KB-Clock.
Существует 3 основных типа клавиатур: Клавиатура XT; Клавиатура AT; Расширенная клавиатура.
При нажатии клавиши клавиатура передает идентифицирующий ее скан-код – номер, идентифицирующий ее расположение на клавиатуре.. При удержании клавиши в нажатом положении через некоторое время начинается автоповтор передачи скан-кода нажатия этой клавиши. При отпускании клавиши клавиатура XT передает ее скан-код, увеличенный на 80h, а клавиатура AT передает 2 байта: в первом содержится пре фикс F0, во втором – скан-код.. Прием байта от клавиатуры вызывает аппаратное прерывание IRQ1 (вектор 9h).
Задание параметров автоповтора, выбор таблиц скан-кодов, управление светодиодными индикаторами, а также управление режимом сканирования матрицы клавиш и запуск диагностического теста осуществляется командами, посылаемыми центральным процессором в порт 60h. Перед посылкой команды необходимо убедится в готовности контроллера к их приему – бит 1 порта 64h должен иметь нулевое значение.
Клавиатура имеет поддержку со стороны BIOS: коды, принятые от клавиатуры, по аппаратному прерыванию IRQ1 (вектор 9h) обрабатываются, и результат для дальнейшей обработки может быть извлечен значительно позже. BIOS INT 9h обрабатывает прерывания, вызванные приходом кодов нажатия и отпускания клавиш, анализируя принятый скан-код с учетом состояния флагов и комбинаций клавиш альтерации Shift, Ctrl, Alt, CapsLock, NumLock. Результат обработки (ASCII-символ и скан-код) помещаются в буфер клавиатуры, расположенный в ОЗУ. В случае переполнения буфера очередное слово не записывается и подается звуковой сигнал.
Кроме обычного способа, любой символ можно ввести в буфер с помощью Alt-набора. Для этого его код в десятичной системе набирается на цифровой клавиатуре при нажатой клавише Alt, результат заносится в буфер но отпускании Alt. При таком способе в буфер будет занесен нулевой скан код, что отличает Alt-набор от обычного.
Используемые ячейки BIOS DATA AREA: 0:0417, 0:0418 – флаги клавиатуры; 0:0419 – аккумулятор кода Alt-набора; 0:041A – 2-байтный указатель головы буфера; 0:041С – 2-байтный указатель хвоста буфера;
0:041Е –область кольцевого буфера (16 слов);
Программно-вызываемое прерывание BIOS 16 h представляет интерфейс прикладного уровня для клавиатуры. Его основное назначение – извлечение слов из клавиатурного буфера. Функция задается в регистре AH при вызове: 00h – чтение и выборка слова из буфера; 01h – проверка готовности, чтение без выборки; 02h – чтение состояния флагов; 03h – установка задержки и скорости автоповтора; 05h – запись слова в буфер.
Младший байт считанного слова содержит ASCII-символ, старший – скан-код.
1.28. АРХІТЕКТУРА ВІДЕОСИСТЕМИ ПК. УПРАВЛІННЯ ВІДЕОСИСТЕМОЮ. РЕЖИМИ. СТРУКТУРА ВІДЕОПАМ'ЯТІ.
Видеосистема персональных компьютеров - основное средство отображения информации, обладают широкими возможностями программирования и наиболее привлекательные для программистов. Управление видеосистемой (формирование текстовых и графических изображений ) возможно путем использования широкого спектра графических пакетов и текстовых редакторов, встроенных графических библиотек, которые имеются практически во всех языках программирования, с использованием функций прерываний BIOS (10h прерывание) и путем непосредственного программирования видеоадаптеров на уровне портов и и непосредственного обращения к видеобуферу.
В IBM PC подобных компьютерах видеосистема состоит из следующих основных модулей: дисплей, видеоадаптер (программирование всей видеосистемы заключается в программировании видеоадаптера); видеопамять (видеобуфер) - оперативная память, физически расположена на плате видеоадаптера и предназначена для хранения выводимой информации текста или графического изображения на экран монитора. Видеопамять представляет собой двухвходовую ОЗУ, т.е. с одной стороны она находится в адресном пространстве процессора и допускает чтение/запись данных от процессора, а с другой стороны схемы видеоадаптера считывают из нее информацию в процессе формирования изображения; внутреннее ПЗУ (ROM BIOS) видеоадаптера, которое физически расположено на плате адаптера и содержит программы поддержки расширенных функций 10h прерывания BIOS системной платы.
Во всех видеомониторах персональных компьютеров используется растровый принцип формирования изображения, при которых текст или графическое изображение формируются на экране электронным лучом, который периодически сканирует экран монитора слева направо и сверху вниз с образованием на нем линий развертки, которые последовательно (сверху вниз) заполняют весь экран. В цветных видеомониторах луч состоит из трех лучей, которые с помощью специальных масок формируют три основных цвета: синий (Blue), зеленый (Green) и красный (Red). Изменяя интенсивность каждой составляющей, получают все разнообразие цветовой гаммы. При формировании растра выводимое из видеобуфера изображение занимает не весь растр, а его центральную часть, окруженную горизонтальным (а) и вертикальным (б) окаймлением (бордюром). Для формирования указанного изображения применяются сигналы: горизонтальное гашение (HBI); горизонтальная синхронизация (HSYNC); вертикальное гашение (VBI); вертикальная синхронизация (VSYNC);
В текстовых режимах устанавливается следующее соответствие между памятью видеоконтроллера и изображением на экране: в начале памяти записываются данные о символе, находящемся на первой строке в левом углу, затем данные об остальных символах первой строки, затем данные о символах второй строки начиная слева и т. д. При выводе текста различные видеосистемы работают одинаково. Для экрана отводится 4000 байт, так что на каждую из 2000 позиций экрана (25 строк x 80 символов) приходится 2 байта . Первый байт содержит код ASCII символа. Аппаратура дисплея преобразует номер кода ASCII в связанный с ним символ и посылает его изображение на экран. Второй байт (байт атрибутов) содержит информацию о том, как должен быть выведен данный символ.
В графическом режиме цветовое
значение каждого пикселя хранится как
один или несколько бит в видеобуфере
и считывается (переносится) на экран,
возможно, с дополнительным табличным
преобразованием. Так как каждый пиксель
на экране можно адресовать через
видеобуфер, графический режим часто
называется режимом с адресацией всех
точек (All Points
Addressable - АРА). Если в
видеобуфере пиксель кодируется n битами,
одновременно на экране можно наблюдать
![]() цветов. С помощью специальных схем
n-битный код расширяется до m бит, причем
m>n.
цветов. С помощью специальных схем
n-битный код расширяется до m бит, причем
m>n.
Поскольку все видеосистемы, кроме монохромного дисплея, имеют достаточно памяти для нескольких видеобуферов, одновременно могут быть сконструированы несколько экранов, каждый из которых может быть выведен в нужный момент. Вместо того чтобы передвигать данные в видеопамяти, монитор посылает данные из другой области видеопамяти. Число доступных страниц может меняться в зависимости от видеосистемы и режима дисплея. В режимах 0-3 и 7 имеется 8 страниц. BIOS хранит в своей области данных однобайтовую переменную ACT_PAGE, указывающую, какая из страниц выводится в данный момент. Диапазон значений этой переменной от 0 до 7. Она расположена по адресу 0040:0062h. Дисплейные страницы выбираются за счет изменения точки видеопамяти, начиная с которой монитор принимает данные. Эта точка памяти устанавливается регистрами 0Ch (старший байт) и 0Dh (младший байт), которые называются регистрами стартового адреса. Для программирования регистров стартового адреса необходимо записать номер регистра в адресный регистр блока (послать номер в порт 3D4,после чего записать данные в порт 3D5).
1.29. ЛОГІЧНА ОРГАНІЗАЦІЯ ДИСКОВИХ НАКОПИЧУВАЧІВ ЗОВНІШНЬОЇ ПАМ'ЯТІ. ОСНОВНІ ОБЛАСТІ (BOOT, FAT, ROOT, DATA AREA).
П роцесс
форматирования диска делит общее
количество секторов на четыре части,
образующие непрерывные сегменты. Эти
сегменты (в порядке расположения на
диске) называются: загрузочная запись
(Boot Record),
таблица размещения файлов (FAT
- File Allocation
Table), корневой каталог
(Root) и пространство данных (Data Area).
роцесс
форматирования диска делит общее
количество секторов на четыре части,
образующие непрерывные сегменты. Эти
сегменты (в порядке расположения на
диске) называются: загрузочная запись
(Boot Record),
таблица размещения файлов (FAT
- File Allocation
Table), корневой каталог
(Root) и пространство данных (Data Area).
После BOOT может быть несколько резервных секторов (*RES).
1) Загрузочная запись (BOOT). На дискетах первый сектор (дорожка 0, сторона 0, сектор 1) содержит запись начальной загрузки, которая является небольшой программой, позволяющей компьютеру считывать с дискового накопителя остальные части MS-DOS, а также данные о структуре диска.
2 )
Таблица размещения файлов (FAT).
Операционная система использует
таблицу размещения файлов (FAT) для
отведения дискового пространства
файлам и хранения информации о свободных
секторах. Из соображений безопасности
на всех дисках хранятся по две копии
FAT. Они хранятся последовательно начиная
с первого сектора FAT. Для дискеты первым
сектором FAT будет сектор, следующий за
BOOT сектором обычно RES=0 , т.е. сектор с
координатами: дорожка 0, сторона 0,
сектор 2. Для жесткого диска первый
сектор FAT определяется с помощью таблицы
разделов и таблицы BOOT. Число секторов,
занимаемых FAT, определяется типом и
форматом диска и указывается в таблице
BOOT (FATSize). Таблица размещения файлов
хранит информацию о каждом кластере
файла на диске. Кластер - это группа
смежных секторов. Каждая позиция в
таблице размещения файлов соответствует
определенному номеру кластера на
диске, т.е. n-й элемент таблицы FAT
соответствует n-му кластеру области
данных (см.рис. 9.1). Так как первые два
элемента таблицы FAT (0, 1) хранят служебную
информацию, то область
)
Таблица размещения файлов (FAT).
Операционная система использует
таблицу размещения файлов (FAT) для
отведения дискового пространства
файлам и хранения информации о свободных
секторах. Из соображений безопасности
на всех дисках хранятся по две копии
FAT. Они хранятся последовательно начиная
с первого сектора FAT. Для дискеты первым
сектором FAT будет сектор, следующий за
BOOT сектором обычно RES=0 , т.е. сектор с
координатами: дорожка 0, сторона 0,
сектор 2. Для жесткого диска первый
сектор FAT определяется с помощью таблицы
разделов и таблицы BOOT. Число секторов,
занимаемых FAT, определяется типом и
форматом диска и указывается в таблице
BOOT (FATSize). Таблица размещения файлов
хранит информацию о каждом кластере
файла на диске. Кластер - это группа
смежных секторов. Каждая позиция в
таблице размещения файлов соответствует
определенному номеру кластера на
диске, т.е. n-й элемент таблицы FAT
соответствует n-му кластеру области
данных (см.рис. 9.1). Так как первые два
элемента таблицы FAT (0, 1) хранят служебную
информацию, то область

данных начинается со 2-го кластера. Обычно файл занимает несколько кластеров и запись в каталоге файлов содержит номер стартового кластера, в котором находится начало файла. Для последнего кластера, занятого файлом, FAT содержит значения от FF8h до FFFh. Неиспользуемым (или освобожденным) кластерам соответствует значение 000, а дефектным секторам -FF7h. Наконец, значения от FF0h до FF7h приписываются резервным кластерам.
3) Корневой каталог (ROOT). Каждый диск имеет один корневой каталог. Расположение корневого каталога на диске фиксировано и определяется типом и форматом диска. Адрес каталога можно определить, используя таблицу разделов (только для жестких дисков) и таблицу BOOT. Корневой каталог используется для хранения информации о файлах, включая имя файла, его размер, начальный элемент таблицы размещения, относящийся к данному файлу, дату и время его создания или модификации и атрибуты файла (см. табл. 9.2). Корневой каталог представляет собой таблицу, в которой каждому файлу на диске (включая подкаталоги и метку тома) соответствует одна запись. Эта запись имеет размер 32 байта, следовательно на одном секторе размером 512 байтов помещается 16 записей (элементов) каталога.
 4) Пространство данных (DATA AREA). Пространство
данных используется для хранения
собственно данных и занимает большую
часть диска.
4) Пространство данных (DATA AREA). Пространство
данных используется для хранения
собственно данных и занимает большую
часть диска.
Логическая структура жесткого диска включает в себя все элементы структуры гибкого диска, (описанные в 9.1.1) и имеет то же самое назначение. Однако, помимо этого, жесткий диск содержит в самом первом секторе (цилиндр (дорожка) 0, головка (сторона) 0, сектор 1) программу, называемую главной корневой записью. Последняя часть этого сектора содержит таблицу разделов ─ 4-элементную таблицу с 16-байтовыми элементами. Этой таблицей манипулирует программа FDISK. Каждый раздел на жестком диске имеет логическое имя. Во время загрузки ROM-BIOS загружает главную корневую запись в память и передает ей управление. Эта программа считывает таблицу разделов, чтобы определить раздел, помеченный как активный. Затем в память считывается загрузочная запись (BOOT) активного раздела и выполняется.

1.30. АРХІТЕКТУРА ТА УПРАВЛІННЯ КОНТРОЛЕРОМ НЖМД. СТРУКТУРА КОМАНД.
Контроллер жестких дисков для ХТ-подобных ПЭВМ
Архитектура ХТ-подобных ПЭВМ допускает подключение к одному контроллеру до двух накопителей. Обмен с жесткими дисками производится с использованием третьего канала DMA. Контроллер генерирует аппаратные прерывания 5-го уровня (IRQ5), вектор прерывания 0Dh. Работа с диском осуществляется с использованием отдельного ПЗУ, содержащего процедуры управления диском, что является характерной особенностью ХТ-подобных ПЭВМ. Обычно в качестве сегментного адреса ПЗУ используется C8000h, но возможны и другие значения (CA000h, D0000h или D8000h для дисков ST-251 или ST-225 фирмы Seagate). Имеется 16 адресов портов ввода-вывода, предназначенных для управления контроллером и накопителями (320h-32Fh), однако реально используются только 4 из них, например 320h-323h, или 324h-327h, или 328h-32Bh, или 32Ch-32Fh. Назначение портов (1-й, 2-й, 3-й и 4-й в каждой группе) одно и то же, поэтому далее будут описаны только порты 320h-323h. Назначение портов контроллера жестких дисков приведено в таблице:
┌───-┬─────┬─────────────────────────────────┐
│Порт │ Режим │ Назначение │
├───-┼─────┼─────────────────────────────────┤
│ 320h │ запись │ Передача команд по управлению накопителями │
│ 320h │ чтение │ Чтение параметров состояния после ошибок, │
│ │ │ возникших в процессе выполнения последней │
│ │ │ команды │
│ 321h │ запись │ Сброс контроллера │
│ 321h │ чтение │ Чтение состояния контроллера │
│ 322h │ запись │ Разблокировка (выбор) контроллера │
│ 322h │ чтение │ Чтение типа накопителя │
│ 323h │ запись │ Установка режима работы контроллера │
└───┴─────┴─────────────────────────────────┘
Общий формат команд НЖМД:
Команда контроллера может состоять из 1 - 6 байт. Общий формат команды:
│ \ биты│ │ │ │ │ │ │ │ │
│ \ │ 7 │ 6 │ 5 │ 4 │ 3 │ 2 │ 1 │ 0 │
│байты\ │ │ │ │ │ │ │ │ │
├────┼─────┴─────┴─────┼─────┴─────┴─────┴─────┴─────┤
│ 0 │ Класс команды │ Код операции (КОП) │
├────┼─────┬─────┬─────┼─────────────────────────────┤
│ 1 │ 0 │ 0 │ У │ Номер головки │
├────┼─────┴─────┼─────┴─────────────────────────────┤
│ │ Цилиндр │ │
│ 2 │ (старшие │ Номер сектора │
│ │ биты) │ │
├────┼───────────┴─────────── ────────────────────────┤
│ 3 │ Цилиндр ( младшие биты ) │
├────┼───────────────────────────────────────────────┤
│ 4 │ Фактор чередования или число секторов │
│ │ (зависит от команды) │
├────┼───────────────────────────────────────────────┤
│ 5 │ Управляющий байт │
Здесь: - класс команды и код операции определяют код команды контроллера;
- У - номер устройства (0/1);
- номер сектора - номер начального сектора для обмена;
- фактор чередования (Interleave Factor) задает последовательность чередования секторов на дорожке;
- структура управляющего байта следующая:
0 - 2 период импульсов сигнала "шаг";
3 - 5 не используются;
6: 1 - запретить повторное считывание при ошибке контрольной суммы, 0 - разрешить;
7: 1 - запретить повторный доступ к диску при ошибке, 0 - разрешить.
1.31. АРХІТЕКТУРА ТА УПРАВЛІННЯ COM-ПОРТОМ. ПРИЗНАЧЕННЯ РЕГІСТРІВ.
Последовательный интерфейс для передачи данных использует одну сигнальную линию, по которой информационные биты передаются друг за другом последовательно. Отсюда название интерфейса и порта.
Последовательная передача данных может осуществляться в асинхронном или синхронном режимах. При асинхронной передаче каждому байту предшествует старт-бит, сигнализирующий приемнику о начале посылки, за которым следуют биты данных и, возможно, бит паритета (четности). Завершает посылку стоп-бит, гарантирующий паузу между посылкам. Старт-бит следующего байта посылается в любой момент после стоп-бита, то есть между передачами возможны паузы произвольной длительности. Старт-бит, имеющий всегда строго определенное значение (логический 0), обеспечивает простой механизм синхронизации приемника по сигналу от передатчика. Подразумевается, что приемник и передатчик работают на одной скорости обмена.
 Рис.
2.1. Формат асинхронной передачи
Рис.
2.1. Формат асинхронной передачи
Формат асинхронной посылки позволяет выявлять возможные ошибки передачи.
В бодах принято измерять частоту изменения состояния линии, а при недвоичном способе кодирования (широко применяемом в современных модемах) в канале связи скорости передачи бит (бит/с).
Асинхронный обмен в PC реализуется с помощью СОМ-порта с использованием протокола RS-232C.
Интерфейс RS-232C предназначен для подключения аппаратуры, передающей или принимающей данные (О ОД – оконечное оборудование данных или АПД - аппаратура передачи данных; DTE - Data Terminal Equipment), к оконечной аппаратуре каналов данных (АКД', DCE - Data Communication Equipment). В роли АПД может выступать компьютер, принтер, плоттер и другое периферийное оборудование. В роли АКД обычно выступает модем. Конечной целью подключения является соединение двух устройств АПД.
Стандарт описывает управляющие сигналы интерфейса, пересылку данных, электрический интерфейс и типы разъемов. В стандарте предусмотрены асинхронный и синхронный режимы обмена, но СОМ-порты поддерживают только асинхронный режим.
СОМ-порты чаще всего применяют для подключения манипуляторов (мышь, трекбол). Питание манипуляторов производится от интерфейса. Каждое событие - перемещение мыши или нажатие-отпускание кнопки – кодируется двоичной посылкой по интерфейсу RS-232C.
Также СОМ-порты используются для подключения внешних устройств; связи двух компьютеров, удаленных друг от друга на небольшое расстояние; для подключения электронных ключей (Security Devices), предназначенных для защиты от нелицензированного использования ПО. СОМ-порт используют для беспроводных коммуникаций с применением излучателей и приемников инфракрасного диапазона - IR (Infra Red) Connection.
Контроллер СОМ-порта является полностью программируемым устройством. Можно программно задать следующие параметры обмена: количество битов данных и стоп-битов^ вид четности и скорость обмена.
Микросхема UART 16550A имеет 12 программируемых однобайтных регистров, с помощью которых управляется и контролируется порт коммуникации. Большинство из них занимаются инициализацией порта. Доступ к этим 12 регистрам осуществляется через восемь адресов портов с номерами 3F8h - 3FFh (или 2F8h - 2FFh).
В пяти случаях регистр, к которому организуется доступ через данный порт, зависит от того, как установлен бит 7 в регистре управления линии (т. н. бит DLAB), который является единственным регистром с адресом порта 3FBh. Назначение регистров 16550А и их отображение на адресное пространство портов (смещение относительно базового адреса) представлено в табл. 3.2.
|
Доступ |
Регистр |
R/W |
||
|
Смещ. |
DLAB |
Ими |
Название |
|
|
Oh |
0 |
THR |
Регистр хранения передатчика - Transmit Holding Register |
W |
|
Ob |
0 |
RBg |
Регистр данных приемника - Receiver Buffer Register |
R |
|
Ob |
1 |
DLL |
Делитель скорости обмена (младший) - Divisor Latch LSB |
R/W |
|
Ih |
1 |
DLM |
Делитель скорости обмена (старший) - Divisor Latch MSB |
R/W |
|
Ih |
0 |
IER |
Регистр разрешения прерыв. - Interrupt Enable Register |
R/W |
|
2h |
X |
im |
Регистр идентификации прерывания - Interrupt Identification Register |
R |
|
2h |
X |
FCR |
Регистр управления FIFO (FIFO Control Register) |
W ; |
|
3h |
X |
LCR |
Регистр управлення линия - Line Control Register |
R/W |
|
4h |
X |
MCR |
Регистр управлення модемом - Modem Control Register |
R/W |
|
5h |
X |
LSR |
Регистр статуса линии - Line Status Register |
R/W , |
|
6h |
X |
MSR |
Регистр статуса модема - Modem Status Register |
R/W |
|
7h |
X |
SCR |
Рабочий регистр - Scratch Pad Register |
R/W |
THR (регистр передатчика) - сюда засылается байт для передачи. Данные, записанные в этот регистр, будут пересланы в выходной сдвигающий регистр (когда он будет свободен), из которого поступят на выход при наличии разрешающего сигнала CTS. Бит 0 передается (и принимается) первым. При длине посылки менее 8 бит старшие биты игнорируются.
RBR (регистр приемника) - отсюда считывается принятый байт. Данные, принятые входным сдвигающим регистром, помещаются в регистр RBR. Если к моменту окончания приема очередного символа предыдущий не был считан из регистра RBR, фиксируется ошибка переполнения. При длине посылки менее 8 бит старшие (лишние) биты в регистре имеют нулевое значение.
DLL (регистр младшего байта делителя частоты). Сюда засылается младший байт делителя (см. DLM).
DLM (регистр старшего байта делителя частоты). Делитель определяется по формуле D=115200/V, где V - скорость передачи. Входная частота синхронизации 1,8432 МГц делится на заданный коэффициент, после чего получается 16-кратная частота передачи данных. Например, для скорости 9600 бод делитель равен П5200/9600=12=ОС1г, поэтому нужно вывести OCh в порт 3F8h и 0 в порт 3F9h.
IER (регистр управления прерываниями). Единичное значение бита разрешает прерывание. Назначение бит:
0: прерывание по приему символа (в режиме FIFO - прерывание по тайм-ауту);
1: прерывание по завершению передачи символа;
2: прерывание по обрыву линии или ошибке в линии;
3: прерывание по изменению состояния модема (любой из линий CTS, DSR,RInDCD);
4-7:должны быть 0.
IIR (регистр идентификации прерываний и признака режима FIFO). Когда происходит прерывание, здесь содержится причина, вызвавшая его. Для упрощения программного анализа UART выстраивает внутренние запросы прерывания по 4-уровневой приоритетной системе. Порядок приоритетов (по убыванию) следующий: состояние линии, прием символа, освобождение регистра передатчика и состояние модема. При возникновении условии прерывания UART указывает па источник с высшим приоритетом до тех пор, пока он не будет сброшен соответствующей операцией. Только после этого будет выставлен запрос с указанием следующего источника.
1.32. АРХІТЕКТУРА ТА УПРАВЛІННЯ LPT – ПОРТОМ В РЕЖИМАХ ECP EPP.
Параллельные интерфейсы характеризуются тем, что в них для передачи бит в слове используются отдельные сигнальные линии, и биты передаются одновременно. Параллельные интерфейсы используют логические уровни ТТЛ (транзисторно-транзисторной логики), что ограничивает длину кабеля из-за невысокой помехозащищенности ТТЛ-интерфейса. Параллельные интерфейсы используют для подключения принтеров. Передача данных может быть как однонаправленной (Centronics), так и двунаправленной (Bitronics). Иногда параллельный интерфейс используют для связи между двумя компьютерами - получается сеть (LapLink).
LPT-порт (Line PrinTer - построчный принтер) - порт параллельного интерфейса. Хотя сейчас через этот порт подключаются не только построчные принтеры, название "LPT" осталось.
Адаптер параллельного интерфейса представляет собой набор регистров, расположенных в пространстве ввода/вывода. Регистры порта адресуются относительно базового адреса порта, стандартными значениями которого являются 3BCh, 378h и 278h. Порт может использовать линию запроса аппаратного прерывания, обычно IRQ7 или IRQ5. Порт имеет внешнюю 8-битную шину данных, 5-битную шину сигналов состояния и 4-битную шину управляющих сигналов.
BIOS поддерживает до четырех (иногда до трех) LPT-портов (LPT1-LPT4) своим сервисом - прерыванием INT 17h, обеспечивающим через них связь с принтером.. Этим сервисом BIOS осуществляет вывод символа (по опросу готовности, не используя аппаратных прерываний), инициализацию интерфейса и принтера, а также опрос состояния принтера.
Стандартный порт имеет три 8-битных регистра, расположенных по соседним адресам в пространстве ввода/вывода, начиная с базового адреса порта (BASE). - Data Register (DR)- регистр данных., Status Register (SR) - регистр состояния; регистр управления (CR).
Стандарт на параллельный интерфейс IEEE 1284, принятый в 1994 году, определяет порты SPP, ЕРР и ЕСР. Стандарт определяет 5 режимов обмена данными, метод согласования режима, физический и электрический интерфейсы.
Режим ЕРР (Enhanced Parallel Port) (EPP Mode) - двунаправленный обмен данными. Управляющие сигналы интерфейса генерируются аппаратно во время цикла обращения к порту. Эффективен при работе с устройствами внешней памяти и адаптерами локальных сетей.
Режим ЕСР (Extended Capability Port) (ECP Mode) - двунаправленный обмен данными с возможностью аппаратного сжатия данных по методу RLE (Run Length Encoding) и использования FIFO-буферов и DMA. Управляющие сигналы интерфейса генерируются аппаратно. Эффективен для принтеров и сканеров.
В компьютерах с LPT-портом на системной плате режим - SPP, ЕРР, ЕСР или их комбинация - задается в BIOS Setup. Протокол ЕРР (Enhanced Parallel Port - улучшенный параллельный порт) был разработан компаниями Intel, Xircom и Zenith Data Systems задолго до принятия IEEE 1284. Он предназначен для повышения производительности обмена по параллельному порту.
Протокол ЕРР обеспечивает четыре типа циклов обмена:
- запись данных;
- чтение данных;
- запись адреса;
- чтение адреса.
Важной чертой ЕРР является то, что обращение процесора к ПУ осуществляется в реальном времени - нет буферизации.
Протокол ЕСР (Extended Capability Port - порт с расширенными возможностями) был предложен Hewlett Packard и Microsoft для связи с ПУ типа принтеров или сканеров. Как и ЕРР, данный протокол обеспечивает высокопроизводительный двунаправленный обмен данными хоста с ПУ.
Протокол ЕСР в обоих направлениях обеспечивает два типа циклов:
- циклы записи и чтения данных;
- командные циклы записи и чтения.
Протокол ЕСР обеспечивает
- компрессию данных хост-адаптером по методу RLE;
- буферизацию FIFO для прямого и обратного каналов;
- применение DMA и программного ввода/вывода.
Программный интерфейс и регистры ЕСР для адаптеров IEEE 1284 определяет спецификация Microsoft.
1.33. АРХІТЕКТУРА SCSI ШИНИ.
Системный интерфейс малых компьютеров SCSI (Small Computer System Interface) был стандартизован ANSI в 1986 году. Интерфейс предназначен для соединения устройств различных классов - памяти прямого (жесткие диски) и последовательного (стриммеры) доступа, CD-ROM, оптических дисков однократной и многократной записи, устройств автоматической смены носителей информации, принтеров, сканеров, коммуникационных устройств и процессоров.
В базовом стандарте можно было к одной шине подключить до 8-ми устройств, включая контроллер. 8-ми разрядная шина данных, мах. скорoсть передачи – до 1,5 Мб/с в асинхронном режиме и до 5 Мб/с в синхронном режиме. Может использоваться контроль четности для обнаружения ошибок.
Устройством SCSI - SCSI Device - называется как хост-адаптер, связывающий шину SCSI с какой-либо внутренней шиной компьютера, так и контроллер целевого устройства - target controller, с помощью которого оно подключается к шине SCSI. К одному контроллеру может подключаться несколько ПУ, по отношению к которым контроллер может быть как внутренним, так и внешним. Шина SCSI взаимодействует не с самими устройствами (наприм, с жестким диском), а со встроенными в них контроллерами.
Хост-адаптер является важнейшим узлом интерфейса, определяющим производительность системы SCSI.
По физической реализации интерфейс является 8-битной параллельной шиной с тактовой частотой 5 МГц. Скорость передачи данных достигает 5 Мбайт/с. Впоследствии появилась спецификация - SCSI-2, расширяющая возможности шины. Тактовая частота шины Fast (быстрый) SCSI-2достигает 10 МГц, a Ultra SCSI-2 - 20 МГц. Разрядность данных может быть увеличена до 16 бит – эта версия называется Wide (широкий) SCSI-2, а 8-битную версию стали называть Narrow (узкий), 16-битная шина допускает 16 устройств.
SCSI-3 - дальнейшее развитие стандарта, направленное на увеличение количества подключаемых устройств, расширение системы команд и поддержку Plug and Play. Устройства SCSI-3 в большинстве случаев показывают более высокую производительность.
Для параллельных шин скорость передачи данных определяется частотой передач, измеряемой в миллионах передач в секунду - МТ/с (Mega Transfer/sec), и разрядностью. Комбинации частоты и разрядности обеспечивают широкий диапазон пропускной способности, достигающей 80 Мбайт/с для версии Ultrа2 Wide SCSI. SCSI Fast означает частоту передач 10 МТ/с. Название SCSI Fast-20 указывает на частоту передач 20 МТ/с. Этот режим, более известный как SCSI Ultra, определен для параллельного интерфейса в SCSI-3. SCST Fast-40 указывает на частоту передач 40 МТ/с. Этот режим, определенный в SCSI-3 и называемый Ultra2 SCSI, в настоящее время является самым быстрым для параллельной шины.
В настоящее время наибольшее распространение имеют устройства SCSI-2, которые сохраняют совместимость с исходной версией, теперь называемой SCSI-1. Однако смешивать устройства SCSI-1 и SCSI-2 неэффективно, да и не всегда возможно.
Физически SCSI представляет собой шину, состоящую из 25 сигнальных цепей. Для защиты от помех каждая сигнальная цепь имеет свой отдельный обратный провод. На применяемых двухрядных разъемах контакты сигнальных и обратных цепей располагаются друг против друга. Это позволяет применять в качестве кабелей как витые пары проводов, так и плоские шлейфы, где сигнальные и обратные провода чередуются.
1.34. АРХІТЕКТУРА USB ШИНИ.
USB (Universal Serial Bus — универсальная последовательная шина) является промышленным стандартом расширения архитектуры PC.
Возможности USB определяется следующими тех. хар-ками:
* Дешевое решение, поддерживающее скорость передачи до 12 Мбит/с.
*мах длина кабеля для высокой скорости обмена – 5м
* низкая скорость обмена – 1,5 Мбит/с.
*мах длина кабеля для низкой скорости обмена – 3м
*мах кол-во подключенных устройств – 127
*Возможно подключение устройств с различными скоростями обмена
*напряжение питания для переферийных устройств – 5В
Особенно удобен этот интерфейс для подключения часто подключаемых\отключаемых приборов, таких как цифровые фотокамеры и др. Возможность использования только двух скоростей обмена данными ограничивает применяемость шины. USB поддерживает динамическое подключение и отключение устройств и конструкция разъемов рассчитана на многократное сочленение\расчленение. Питание непосредственно от USB возможно только для устройств с малым потреблением, таких как клавиатуры, мыши, джойстики и т.п.
USB обеспечивает одновременный обмен данными между хост-компьютером и множеством периферийных устройств (ПУ). Распределение пропускной способности шины между ПУ планируется хостом и реализуется им с помощью посылки маркеров. Шина позволяет подключать, конфигурировать, использовать и отключать устройства во время работы хоста и самих устройств.
Устройства (Device) USB могут являться хабами, функциями или их комбинацией. Хаб (Hub) обеспечивает дополнительные точки подключения устройств к шине. Работой всей системы USB управляет хост-контроллер (Host Controller), являющийся программноаппаратной подсистемой хост-компьютера.
Функции представляют собой устройства, способные передавать или принимать данные или управляющую информацию по шине.
Хаб - ключевой элемент системы РпР в архитектуре USB. Хаб является кабельным концентратором. Точки подключения называются портами хаба. Каждый хаб преобразует одну точку подключения в их множество. Архитектура допускает соединение нескольких хабов.
Стандарт USB определяет электрические и механические спецификации шины.
Информационные сигналы и питающее напряжение 5 В передаются по четырехпроводному кабелю (GND – цепь «корпуса» для питания переферийных устройств, VBus- +5В также для цепей питания. Шина D+ предназначена для передачи данных по шине, а шина D- для приема данных).
Шина имеет два режима передачи. Полная скорость передачи сигналов USB составляет 12 Мбит/с, низкая - 1,5 Мбит/с. Для полной скорости используется экранированная витая пара с длиной сегмента до 5 м, для низкой - невитой неэкранированный кабель до 3 м. Одна и та же система может одновременно использовать оба режима.
Низкая скорость предназначена для работы с небольшим количеством ПУ, не требующих высокой скорости (клавиатуры , мыши, джойстики, матричные принтеры, дигитайзеры, цифровые фотокамеры, модемы). В режиме высокой скорости – колонки, модемы, офисные АТС, лазерные и струйные принтеры.
Архитектура USВ предусматривает внутреннюю буферизацию всех устройств, причем чем большей полосы пропускания требует устройство, тем больше должен быть его буфер.
2.1 МЕТОДИ ВІДОКРЕМЛЕННЯ КАНАЛІВ У БАГАТОКАНАЛЬНИХ СИСТЕМАХ ПЕРЕДАЧІ ДАНИХ.

Временное разделение – для каждого подканала отделяется временной промежуток для передачи инф. И такое отделение происходит периодично. Применяется в системах голосовой связи с передачей инф. путем фазовой (импульсно – фазовой) модуляции, а сами импульсы передаются с амплитудной модуляцией на высоких частотах. Система сдвигается пока не будет совпадения. Недостатки: Чтобы выделить один канал необходимо использовать всю аппаратуру для выделения.

Ч астотное
разделение – для каждого подканала
отделяется частотный диапазон для
передачи инф. Недостатки: Неэффективное
использование полосы пропускания.
Ширина полосы пропускания влияет на
скорость. Чем шире, тем большая тактовая
частота может быть использована.
астотное
разделение – для каждого подканала
отделяется частотный диапазон для
передачи инф. Недостатки: Неэффективное
использование полосы пропускания.
Ширина полосы пропускания влияет на
скорость. Чем шире, тем большая тактовая
частота может быть использована.
2.2 ПЕРЕТВОРЕННЯ, КОДУВАННЯ, МОДУЛЯЦІЯ. ПРИЗНАЧЕННЯ ЦИХ ПРОЦЕСІВ ПРИ ПЕРЕДАВАННІ ДАНИХ. ТЕОРЕМА КОТЄЛЬНІКОВА (НАЙКВІСТА).
Системы связи определяют по способам преобразования сообщения в сигнал и наоборот. Процесс преобразования может состоять из:
- первичное преобразование
- кодирования
- модуляций.
Преобразование – преобразование неэлектрических величин в первичный електр. сигнал (микрофон, датчики, последствия нажатия клавиш).
Кодирование – это преобразование сообщения в определенные комбинации дискретных символов, которые наз. кодовыми комбинациями, словами. Кодирование присуще только дискретным системам связи.
Коды – системы соответствий между сообщениями и комбинациями дискретных символов.
Мощность (объем) кода – кол-во кодовых комбинаций. - (N)
Значительность кода – кол-во элементов в кодовой комбинации – (n) N=mn
Основание кода – кол-во разных элементов кода. – (m)
Модуляция – смена значения параметра сигнала-носителя в соответствии с функцией, которая отображает передачу сообщения.
Схема процесса модуляции (рис.1):
Носитель Модулированный носитель

Рис. 1
Теорема Котельникова (Найквиста) утверждает:
Сигнал, заданный функцией от времени
с ограниченным по ширине спектром
вполне является определенным своими
мгновенными значениями, которые
размещены через интервалы времени
![]() ,
где F – ширина спектра
функции.
,
где F – ширина спектра
функции.
Эти значения называют определенными ординатами или отсчетами. Условие, что некоторая функция одновременно ограничена во времени и по спектру, никогда не выполняется. Поэтому выводы этой теоремы применяют, когда спектр вне диапазона F быстро затухает. Теорема является основой для многоканальных систем с временным распределением каналов.
Спектр – это совокупность гармоничных составляющих, которые в сумме дают сигнал.
2.3 МОДУЛЯЦІЯ. РІЗНОВИДИ МОДУЛЯЦІЇ. ШВИДКІСТЬ МАНІПУЛЯЦІЇ.
Модуляция – процесс преобразования непрерывного сигнала в дискретный по времени.
Модуляция – изменение значения параметра носителя сигнала в соответствии с функцией, которая отображает переданное сообщение.
Манипуляция – разновидность модуляции (амплитуда сигнала изменяется дискретно и кол-во дискретных уровней конечно).
Для передачи непрерывных сигналов используют модуляцию, для дискретных – манипуляцию.
Скорость манипуляции или скорость телеграфирования – это кол-во элементарных посылок на протяжении 1сек. Она измеряется в бодах (1бод=1посылка/1сек).
Разновидности манипуляций:
1. Носитель – постоянный ток. Уровни «0»- 0В, «1»- 10В
Смена знака постоянного тока. Уровни «0» - -10В, «1» - +10В
2. Носитель – гармоничные колебания
- Амплитудная манипуляция (модуляция) - АМ
- Частотная манипуляция (модуляция) – ЧМ
- Фазовая манипуляция (модуляция) - ФМ
3. Носитель – прямоугольные импульсы
- амплитудно-импульсная (АИМ) – амплитуда импульса пропорциональна амплитуде входного сигнала (рис.1).
- широтно-имипульсная (ШИМ) – широта импульса пропорциональна амплитуде входного сигнала (рис.2).
- фазо-импульсная (ФИМ) – фаза импульса пропорциональна амплитуде входного сигнала (рис.3).



2.4 КІЛЬКІСТЬ ІНФОРМАЦІЇ. ЕНТРОПІЯ. НАДМІРНІСТЬ.
Численная мера количества информации должна соответствовать след. условиям:
1. Кол-во информации в сообщении пропорционально длине сообщения.
2. Кол-во информации равно нулю, если в системе возможно только 1 сообщение.
Т.к. система событий конечная и полная, то сумма вероятностей начала событий – есть единица. Поэтому для удобства за единицу информации берут такое кол-во, которое исключает неопределенность относительно появления одной из двух возможных вероятных независимых событий. Такая единица кол-ва информации наз. «двоичной единицей информации» или бит.
Таким обр. мера кол-ва инф., которая есть в сообщении: I=logpi где pi – вероятность появления сообщения.
Энтропия – среднее кол-во инф. на 1сообщение. Энтропия показывает степень разнообразия возможных состояний системы.
Избыточность сообщения (R) – мера возможного сокращения сообщения
R=1-
Одной из информационных характеристик источника дискретных сообщений является избыточность, которая определяет, какая доля максимально-возможной энтропии не используется источником
Избыточность приводит к увеличению времени передачи сообщений, уменьшению скорости передачи информации, излишней загрузки канала, вместе с тем, избыточность необходима для обеспечения достоверности передаваемых данных, т. е. надежности СПД, повышения помехоустойчивости. При этом, применяя специальные коды, использующие избыточность в передаваемых сообщениях, можно обнаружить и исправить ошибки.
2.5 КЛАСИФІКАЦІЯ ЗАВАД. ВЛАСТИВОСТІ ФЛУКТУАЦІЙНИХ ЗАВАД.
ПОРІВНЯННЯ МЕТОДІВ МАНІПУЛЯЦІЇ ЗА ЗАВАДОСТІЙКІСТЮ.
1. По действиям помехи делятся на :
- аддитивные
- мультипликативные
Аддитивные – электические возмущения, которые суммируются с полезным сигналом.
Мультипликативные помехи – нерегулярное смешивание коэффициента передачи канала связи, которое меняет амплитуду и спектр сигналов.
Эти разновидности помех могут действовать одновременно.
2. По временной структуре помехи делятся на:
- непрерывные
- импульсные
Флуктуационные помехи – помехи непрерывного типа – последовательность кратковременных вспышек колебаний.
Как случайный сигнал флуктуационная помеха имеет равномерный частотный спектр и нормальный закон распределения.
Импульсные помехи – последовательность случайно расположенных во времени импульсов, которые не перекрываются.
Совокупные в спектре помехи – помехи, энергия которых совокупна в полосе частот, соизмеримой по ширине с полосой частот сигнала или уже ее.
Взаимодействие сигнала и помехи в нелинейных цепочках приводят к появлению комбинационных помех.
Сравнение методов манипуляций следует проводить при условиях реальных ограничений. Известно, что нарастая мощность сигнала, теоретически можно достичь отношения мощности сигнала к мощности помех. Считается, что вектор полезного сигнала для разных видов манипуляций будет одинаковый по длине, а сравнение можно провести по модулю вектора.
Амплитудная манипуляция Частотная манипуляция
п



 оложение
«1» положение «1»
оложение
«1» положение «1»

положение «0» положение «0»
Фазовая манипуляция
положение «1»




положение «0»
При частотной манипуляции векторы расположены под углом 900, т.к каждый из них явл. сигналом одной частоты, который не имеет в своем составе другой частоты, поэтому проекция одного вектора на другой должна быть нулевой. Это бывает при угле 900 .
При фазовой манипуляции сигналы с противоположной фазой при сложении дают ноль.
Из сравнения следует, что наименьшая помехоустойчивость в амплитудной манипуляции. Наилучшая помехоустойчивость в фазовой манипуляции.
2.6 АМПЛІТУДНА МАНІПУЛЯЦІЯ. МОДУЛЯТОР ТА ДЕТЕКТОР. СПЕКТР СИГНАЛУ ТА ПОТРІБНА СМУГА ПЕРЕПУСКАННЯ КАНАЛУ.
Модуляція – це змінювання параметру носія сигналу у відповідності до функції, що відображає передане повідомлення.
Якщо змінюваний параметр при модулюванні змінюється дискретно, то модуляція має назву маніпуляція.
Амплітудна маніпуляція (АМ) – носій сигналу – гармонічні коливання.
Список значень амплітуд дискретен (скінченний). Амплітуда приймає певне значення з фіксованого значення амплітуд.
Спектр – це сукупність гармонічних складових, які у суммі дають сигнал.
Модулятор
 До
посилення
До
посилення
потужності та в лінію зв’язку


 t
t



![]()
З метою визначення потрібної смуги пропускання скористаємось випробувальним сигналом
 Амплітудний детектор τ
Амплітудний детектор τ![]() 20
20
![]()
Періодичний радіоімпульс з частотою носія fn:
B=![]() B =2Fm
Fm=
B =2Fm
Fm=![]()
Вивченню підлягає амплітудний спектр радіоімпульсів та можливість його обмеження.

fn-5Fm fn-5Fm fn fn+3Fm fn+5Fm
Детектор – це прилад, який реагує на зміну деяких характеристик прийнятого сигналу.
Смуга перепускання каналу – набір частот, на яких передача інформації проходить з мінімальними втратами.
Якщо смуга пропускання пропустить лише
коливання з частотою fn
, то кількість нулів та одиниць
неможна буде визначити, бо зникне
модуляція. Пропускання верхньої та
нижньої перших гармонік забезпечує
можливість розрізняти одиниці та нулі,
тому потрібна смуга
![]() .
.
2.7 ЧАСТОТНА МАНІПУЛЯЦІЯ. МОДУЛЯТОР, ДЕТЕКТОР.
СПЕКТР СИГНАЛУ ТА ПОТРІБНА СМУГА ПЕРЕПУСКАННЯ КАНАЛУ.
Модуляція – це змінювання параметру носія сигналу у відповідності до функції, що відображає передане повідомлення.
Якщо змінюваний параметр при модулюванні змінюється дискретно, то модуляція має назву маніпуляція.
Частотна маніпуляція - це спосіб кодування сигналу, при якому хар-ка кодування інформації є частота сигналу.
Структурна схема маніпулятора:

f1 – “1” f2 - “0”
fp=f1-f2 - рознесення частот
fd=fp/2 - девіація частоти (відхилення)
fd/fпер - індекс частотної маніпуляції
fпер - частота сигналу, що буде переданий
fd<<fнес
З метою визначення потрібної смуги пропускання скористаємось випробувальним сигналом.


U1
 1-U1>U0
1-U1>U0
0-U1<U0
U2
Компаратор
Така частотна модуляція протистоїть мультиплікативним завадам.
Спектр сигналу– це сукупність гармонічних складових, які у суммі дають сигнал.
Детектор – це прилад, який реагує на зміну деяких характеристик прийнятого сигналу.
Смуга перепускання каналу – набір частот, на яких передача інформації проходить з мінімальними втратами.
Потрібна смуга пропускання:
s
![]()
![]() ам=1,5В
ам=1,5В
“1” “0”
![]() чм=3В
чм=3В
f
f1 f2
При частотній маніпуляції частота
коливань передатчика маніпулюється
відносно середнього значення fнес
. Ефективна смуга сигналу
![]() чм
залежить від способу реалізації
частотної маніпуляції. Існує два способи
маніпуляції:
чм
залежить від способу реалізації
частотної маніпуляції. Існує два способи
маніпуляції:
1 Спосіб з розривом фази
Uc(t) Цей спосіб припускає наявність двох задающих
 генераторів, які генерують коливання
з частотами ώ0 та ώ1 і
генераторів, які генерують коливання
з частотами ώ0 та ώ1 і
комутуємих у відповідності з видом передаваємих посилок.
Так як фази колевань задающих генераторів незалежні, у
t моменти переключення з’являються різкі скачки фази (рис.6),
які призводять до небажаного розширення ефективної шини
спектру сигналу. Тому цей метод частотної модуляції
використовується дуже рідко.
Рис.6
2 Спосіб без розриву фази припускає наявність одного задающого генератора. Частотна маніпуляція відбувається зміною параметрів (зазвичай ємкості) його коливального контуру (рис.7).
Uc(t) завдяки плавному переходу від посилки «1» до активної паузи «0»
«1» «0» «1»
с пектр
сигналу виявляється значно вузькішим,
ніж при ЧМ з розривом фази.
пектр
сигналу виявляється значно вузькішим,
ніж при ЧМ з розривом фази.
t
Рис.7
-
ФАЗОВА МАНІПУЛЯЦІЯ. СПЕКТР СИГНАЛУ ТА ПОТРІБНА СМУГА ПЕРЕПУСКАННЯ КАНАЛУ. ВІДНОСНА ФАЗОВА МАНІПУЛЯЦІЯ ТА ДЕТЕКТУВАННЯ.
Модуляція – це змінювання параметру носія сигналу у відповідності до функції, що відображає передане повідомлення. Якщо змінюваний параметр при модулюванні змінюється дискретно, то модуляція має назву маніпуляція.
Фазова маніпуляція - це спосіб кодування сигналу, при якому хар-ка кодування інформації є зміна фази сигналу на протилежну.
Спектр сигналу– це сукупність гармонічних складових, які у суммі дають сигнал.
Смуга перепускання каналу – набір частот, на яких передача інформації проходить з мінімальними втратами. Структурна схема маніпулятора (рис. 1):


![]() φ=00
φ=1800
φ=00
φ=1800
Рис. 1
Ф азова
модуляція у чистому вигляді майже
не використовується, тому існує відносна
фазова модуляція – для виявлення
інформації, яка знаходиться у кожній
посилці, ця посилка порівнюється з
однією із наступних її посилок (зазвичай,
з попередньою). Це досягається при
передачі посилки «0» фаза коливання,
що несе, посилці, яка передавалася,
залишається такою ж, як і у попередньої
посилці. А при передачі посилки «1» її
фаза змінюється на 1800. При фазовій
маніпуляції фаза несущого коливання
змінюється при зміні знаку посилці
(«0» або «1»).
азова
модуляція у чистому вигляді майже
не використовується, тому існує відносна
фазова модуляція – для виявлення
інформації, яка знаходиться у кожній
посилці, ця посилка порівнюється з
однією із наступних її посилок (зазвичай,
з попередньою). Це досягається при
передачі посилки «0» фаза коливання,
що несе, посилці, яка передавалася,
залишається такою ж, як і у попередньої
посилці. А при передачі посилки «1» її
фаза змінюється на 1800. При фазовій
маніпуляції фаза несущого коливання
змінюється при зміні знаку посилці
(«0» або «1»).
Для визначення інформації, що міститься у першій посилці повідомлення, перед ній повинна бути послана у лінію додаткова посилка з проізвольною фазою коливань несущої частоти.
Є два способи прийому та декодування сигналів при ВФМ: спосіб порівняння фаз (ВФМ1) та спосіб порівняння полярностей (ВФМ2).
Спосіб порівняння фаз (ВФМ1): при цьому способі за допомогою елементу пам’яті співпадають у часі n-я та (n-1)-я недетектировані посилки. Їх фази порівнюються у фазовому детекторі. Полярність напруги на виході детектора визначається співвідношенням фаз посилок, що порівнюються – рис. 2.
Недоліками ВФМ1 є: порівняльно важке виготування елементів затримки на несущій частоті коливань та дещо меньша, ніж при ВФМ2, завадостійкість.
 n-я
недетектирована вихід
n-я
недетектирована вихід
посилка
(n-1)-я недетектирована
посилка
Спосіб порівняння полярностей (ВФМ2):це спосіб, що порівнює полярності n-й та (n-1)-й детектированих посилок, що відображають співвідношення фаз коливань цих посилок.
2.9. РІЗНОВИДИ ФАЗОВОЇ МАНІПУЛЯЦІЇ: ДВФМ, ТВФМ, КАМ.
Фазова маніпуляція - це спосіб кодування сигналу, при якому хар-ка кодування інформації є зміна фази сигналу на протилежну.
ДВФМ – двухразовая относительная фазовая манипуляция, которая использует 2 канала для передачи данных. ТВФМ – трёхразовая относительная фазовая манипуляция. ДВФМ и ТВФМ используются при условии, когда необходимо передать несколько битов за такт. Для передачи 1-го бита за такт необходимо организовать 2 уровня фазы (фаза и противофаза), для передачи 2-х бит за такт – 4 уровня фазы, а для 3-х бит за такт – 8 уровней, т.е. используется следующая зависимость:
1 бит/такт -> 21=2
2 бит/такт -> 22=4
3 бит/такт -> 23=8
Таким образом, рассматривается только 4 варианта фазы. Приёмник имеет генератор, который генерирует все варианты фазы. Так же можно рассматривать все варианты ТВФМ. Но, как и у всех методов, здесь есть свои недостатки (чем меньше расстояние между векторами, тем меньше постоянство) и преимущества (увеличение быстродействия в 3 раза в ТВФМ, и соответственно в 2 раза в ДВФМ).
ТВФМ очень похожа на корреляционный метод. При полном совпадении векторов коэффициент корреляции К= 1, при полной противоположности К= -1, а при перпендикулярном расположении относительно друг друга К= 0.
КАМ – квадратурно-амплитудная манипуляция. При помощи ДВФМ можно за 1 такт передать 2 бита:

КАМ рекомендована протоколом .V32. С помощью КАМ можно передавать 4 бита за такт. “+”
-
Увеличение скорости передачи информации
-
Уменьшение количества проводов (2 провода)
“-”
-
Радиус действия этого способа – 10-15 метров.
2.10. КЛАСИФІКАЦІЯ СИСТЕМ ПЕРЕДАВАННЯ ДАНИХ ЩОДО БОРОТЬБИ З ПОМИЛКАМИ.
Классификация систем передачи данных касательно борьбы с ошибками:
-
Системы с обратной связью:
-
Системы с информационной обратной связью.
-
Данные передаются получателю, потом получатель отсылает данные обратно; на отправном пункте проверяют отправленный и полученный сигналы. Если они совпадают, то посылается кодовая комбинация подтверждения. Если не совпадают – сообщение повторяется.
Недостаток системы – времени для передачи данных необходимо в 2 раза больше.
-
Системы с определяющей обратной связью.
Пользуются кодами, что определяет ошибки. Передаётся сообщение и код для определения ошибки получателю. Если обнаружена ошибка по коду, получатель посылает запрос на передачу ещё одного сообщения.
-
Системы без обратной связи:
-
Ничего не делаем (телеграфия).
-
Используем коды, которые исправляют ошибки.
-
Используем систему с многоразовым повторением информации (чем больше избыточность, тем больше времени на передачу, но выше вероятность правильной передачи информации).
2.11. КЛАСИФІКАЦІЯ ПОХИБКОСТІЙКИХ КОДІВ. ВИРАЗИ ДЛЯ РОЗРАХУНКУ ВІРОЄМНОСТІ НЕВИЯВЛЕНОЇ ПОМИЛКИ ДЛЯ КОДІВ ІЗ СТАЛОЮ ВАГОЮ ТА ДЛЯ КОДІВ З КОНТРОЛЕМ ЗА ПАРИТЕТОМ
Помехоустойчивость- способность системы осуществлять прием информации в условиях наличия помех в линии связи и искажений во внутри аппаратных трактах. Помехоустойчивость обеспечивает надежность и достоверность передаваемой информации (данных). Мы будем в основном рассматривать двоичные коды. Двоичные (коды) данные передаются между вычислительными терминалами, летательными аппаратами, спутниками и т. д.
Передача данных в вычислительных системах чувствительна к малой доле ошибке, т. к. одиночная ошибка может существенно нарушить процесс вычислений.
Наличие помех ставит дополнительные требования к методам кодирования. Для защиты информации от помех необходимо вводить в том или ином виде избыточность: повышение мощности сигнала; повторение сообщений; увеличение длинны кодовой комбинации и т. д.
Одним из наиболее эффективных методов повышения достоверности и надежности передачи данных является помехоустойчивое кодирование, позволяющее за счет внесения дополнительной избыточности (увеличение минимального кодового расстояния) в кодовых комбинациях передаваемых сообщений обеспечить возможность обнаружения и исправления одиночных, кратных и групповых ошибок.
Минимальное кодовое расстояние характеризует помехоустойчивость и избыточность сообщений. В зависимости от величины минимального кодового расстояния существуют коды, обнаруживающие и исправляющие ошибки.
Кодовое расстояние - d определяется как количество единиц в результате суммирования по модулю два двух кодовых комбинаций. Минимальное кодовое расстояние d0 - минимальное из кодовых расстояний всех возможных кодовых комбинаций.
Для обнаружения r ошибок минимальное кодовое расстояние равно:
d0 r+1. (12.1)
Для обнаружения r ошибок и исправления s ошибок минимальное кодовое расстояние равно:
d0 r+s+1. (12.2)
Только для исправления ошибок минимальное кодовое расстояние равно:
d0 2s+1. (12.3)
Помехоустойчивыми или корректирующими кодами называются коды, позволяющие обнаружить и устранить ошибки при передаче информации из-за воздействия помех.
Наиболее распространенным является класс кодов с коррекцией одиночных и обнаружением двойных ошибок (КО-ОД). Самым известных среди этих кодов является код Хэмминга, имеющий простой и удобный для технической реализации алгоритм обнаружения и исправления одиночной ошибки.
Линейным называется код, в котором проверочные символы представляют собой линейные комбинации информационных. Групповым называется код, который образует алгебраическую группу по отношению операции сложения по модулю два.
Свойство линейного кода: сумма (разность) кодовых векторов линей-ного кода дает вектор, принадлежащий этому коду. Свойство группового кода: минимальное кодовое расстояние между кодовыми векторами равно минимальному весу ненулевых векторов. Вес кодового вектора равен числу единиц в кодовой комбинации.
Код Хэмминга относится к классу линейных кодов и представляет собой систематический код – код, в котором информационные и контрольные биты расположены на строго определенных местах в кодовой комбинации.
Код Хэмминга, как и любой (n, k)- код, содержит к информационных и m = n-k избыточных (проверочных) бит.
Избыточная часть кода строится т. о. чтобы можно было при декодировании не только установить наличие ошибки но, и указать номер позиции в которой произошла ошибка , а значит и исправить ее, инвертировав значение соответствующего бита.
Циклическим кодом называется код, в котором кодовая комбинация, полученная путем циклического сдвига разрешенной кодовой комбинации, является также разрешенной кодовой комбинацией. Такой код называется также полиномиальным или кодом с циклическими, избыточными проверками (ЦИП). Циклический сдвиг осуществляется справа налево, при этом крайний левый символ переносится в конец комбинации. Циклический код является: линейным, блочным, корректирующим, равномерным, систематическим. В циклических кодах кодовые комбинации представляются в виде многочленов, что позволяет свести действия над кодовыми комбинациями к действиям над многочленами (используя аппарат полиномиальной алгебры).
2.12. ПЕРВИЧНЫЕ КОДЫ И СПОСОБЫ РАСШИРЕНИЯ КОДИРОВОЧНОЙ ТАБЛИЦЫ. ESC-ПОСЛЕДОВАТЕЛЬНОСТИ ПРИНТЕРОВ.
Коды в технике передавания информации – это системы соответствий между сообщениями и комбинациями дискретных символов, при помощи которых сообщения могут быть переданы и приняты.
Элементы кода – элементарные символы, из которых формируются кодовые комбинации.
Основа кода – количество (m) разных элементов кода.
Мощность кода, объём кода – количество (N) различных кодовых комбинаций.
Значимость кода – количество элементов в кодовой комбинации кода.
Равномерные коды – коды, у которых кодовые комбинации имеют одинаковое количество элементов (значимость).
Неравномерные коды – коды, в которых значимость различна.
При последовательном расположении кодовых комбинаций возникает проблема разделения кодовых комбинаций. В равномерных кодах используется подсчёт количества элементов. В не приведенном коде короткая кодовая комбинация не может быть началом длинной комбинации.
Примеры первичных кодов:
|
Название |
m |
n |
N=mn |
Примечание |
|
1. МТК-2 |
2 |
5 |
32 |
Трирегистровый |
|
2. IBM |
2 |
6 |
64 |
|
|
3. ASCII (связь) |
2 |
7 |
108 |
Двурегистровые кодовые комбинации |
|
(компьют.) |
2 |
8 |
256 |
Двурегистровые кодовые комбинации |
|
4. EBCDJC |
2 |
8 |
256 |
Двурегистровые кодовые комбинации |
ASCII – American Standart Code for Information Interchange
EBCDJC – Extended Binary Coded Decimal Interchange Code
Способы расширения кодировочной таблицы первичных кодов.
-
Регистровый. В МТК-2 выделены 3 кодовые комбинации, которые меняют регистры. Регистры РУС, ЛАТ, ЦИФР. На каждом регистре доступны 32-4=28 (3 регистра + 1 пропуск) кодовых комбинаций, т.е. всего 28*3=84. Все кодовые комбинации после регистровой рассматриваются как кодовые комбинации символов из кодировочной таблицы этого регистра. И так до появления новой регистровой кодовой комбинации.
-
Полная замена кодировочной таблицы.Среди кодовых комбинаций ASCII (или КОИ-7) была предусмотрена кодовая комбинация DLE(10h) – AP1, которая предлагалась для изменения значений некоторого количества последующих кодовых комбинаций.
-
Замена значения одной кодовой комбинации. Среди кодовых комбинаций ASCII (КОИ-7) была предусмотрена кодовая комбинация ESC(1Bh) – AP2, которая изменяла значение одной кодовой комбинации, ушедшей после ESC.
Таблица ESC-последовательностей, при помощи которых управляют шрифтами, интервалами, режимами и др. в принтерах EPSON (Япония) признана стандартом для матричных 9-игольных принтеров. Таблицы ESC-последовательностей лазерных принтеров объёмные, а некоторые из них имеют названия PCL-4, PCL-5. PCL – Page Control Language – язык управления (печатью) страниц.
2.13. ПРИЧИНЫ ИСПОЛЬЗОВАНИЯ МОДУЛЯЦИИ ПРИ ПЕРЕДАЧЕ ДАННЫХ. РАЗНОВИДНОСТИ МОДУЛЯЦИИ И НЕОБХОДИМЫЕ ПОЛОСЫ ПРОПУСКАНИЯ ЛИНИЙ СВЯЗИ.
Модуляція – це змінювання параметру носія сигналу у відповідності до функції, що відображає передане повідомлення. Якщо змінюваний параметр при модулюванні змінюється дискретно, то модуляція має назву маніпуляція.
При частотной манипуляции частота колебаний передатчика манипулируется относительно среднего значения fнес. Символам «1» и «0» соответствуют двоичные сигналы:
![]()
Разность частот Fp
= f0-f1,
где
![]() называется разносом
частот, а величина
называется разносом
частот, а величина
![]() —
девиацией частоты.
—
девиацией частоты.
Отношение девиации к основной частоте манипуляции т = Fd/Fm называется индексом частотной манипуляции. Обычно Fd<<fнес.
Эффективная полоса сигнала ∆Fчм зависит от способа осуществления частотной манипуляции. Существует два способа манипуляции:
-
Способ с разрывом фазы предполагает наличие двух задающих генераторов, генерирующих колебания с частотами
 и
коммутируемых в соответствии с видом
передаваемых посылок. Так как фазы
колебаний задающих генераторов
независимы, в моменты переключения
возникают резкие скачки фазы,
приводящие к
нежелательному расширению эффективной
ширины спектра сигнала. Вследствие
этого, а также из-за сложности реализации
(необходимость иметь два задающих
генератора) и других недостатков способ
частотной манипуляции с разрывом
фазы применяется редко.
и
коммутируемых в соответствии с видом
передаваемых посылок. Так как фазы
колебаний задающих генераторов
независимы, в моменты переключения
возникают резкие скачки фазы,
приводящие к
нежелательному расширению эффективной
ширины спектра сигнала. Вследствие
этого, а также из-за сложности реализации
(необходимость иметь два задающих
генератора) и других недостатков способ
частотной манипуляции с разрывом
фазы применяется редко. -
Способ без разрыва фазы предусматривает наличие одного задающего генератора. Частотная манипуляция осуществляется изменением параметров (обычно емкости) его колебательного контура, благодаря плавному переходу от посылки «1» к активной паузе «0» спектр сигнала оказывается значительно более узким, чем при ЧМ с разрывом фазы. Хотя и в этом случае спектр сигнала теоретически бесконечен, основная энергия сосредоточена в сравнительно узкой полосе, ширина которой определяется частотой манипуляции Fm и индексом частотной манипуляции т. В системах передачи данных, использующих узкополосные тракты (например, стандартный телефонный канал), с целью повышения пропускной способности значения т выбирают малыми. Удовлетворительная с точки зрения помехоустойчивости эффективная полоса при узкополосной ЧМ может быть в первом приближении определена из выражения
![]()
В радиолиниях, использующих метод ЧМ, величина девиации выбирается обычно (с учетом требований помехоустойчивости и стабильности параметров передатчика и приемника) в несколько раз большей, чем при узкополосной ЧМ.
-
2.14. ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ СИГНАЛОВ И ПОМЕХ. ИДЕАЛЬНЫЙ ПРИЁМНИК КОТЕЛЬНИКОВА и ДРУГИЕ ВАРИАНТЫ ПОСТРОЕНИЯ ПРИЁМНИКОВ ДВОИЧНЫХ СИГНАЛОВ.
Любую реализацию сигнала можно подать как 2FT отсчётов, где F – ширина спектра, T – продолжительность (теорема Котельникова). Отсчёты можно считать компонентами многомерного вектора. Это взаимооднозначное отображение порождает множесто полезных аналогов и составляет основу раздела математики – функционального анализа.
|
Многомерное геометрическое пространство |
Пространство электрических сигналов с шириной спектра F и продолжительностью T |
|
Вектор
|
Сигнал
|
|
Длина вектора
|
P – мощность, Uэф – эффективное значение. Длина вектора пропорциональна эффективному значению сигнала. |
|
Умножение вектора на скаляр |
Умножение вектора на скаляр |
|
Сложение векторов
|
Сложение сигналов
|
|
Скалярное произведение двух векторов
|
Ковариация сигналов
|
|
Косинус угла между векторами
|
Коэффициент корреляции сигналов
|
|
|
|





Идеальный приёмник Котельникова – это идея постройки приёмника двоичных сигналов при наличии помех, которая базируется на геометрической интерпретации сигналов и помех. Пусть имеется двухмерное пространство ( для упрощения пояснений)

Если конец суммарного вектора находится над плоскостью разделения – сигнал интерпретируется как «1», если в плоскости или под ней – интерпретируем как «0».
Таким образом, геометрическая интерпретация сигналов и помех является плодотворной для создания алгоритмов постройки и действия приёмников двоичных сигналов в аппаратуре передачи данных.
Существует 2 метода распознавания двоичных сигналов:
-
Распознавание нулей и единиц по признаку расстояния от эталонных точек
-
Распознавание нулей и единиц корреляционным методом
2.15. СИНХРОНИЗАЦИЯ В АППАРАТУРЕ ПЕРЕДАЧИ ДАННЫХ И В УСТРОЙСТВАХ СЧИТЫВАНИЯ МАГНИТНЫХ ЗАПИСЕЙ, СПОСОБЫ КОДИРОВАНИЯ, КОТОРЫЕ ПОВЫШАЮТ НАДЁЖНОСТЬ СИНХРОНИЗАЦИИ БИТОВ.
-
Параллельный метод
В параллельном методе информация передаётся одновременно по n проводов, также выделяют дополнительный провод для синхронизации. Этот метод не широко распространён, потому что он необходим только для быстрой передачи информации на большие расстояния. Для параллельного метода передачи информации используются оптоволоконные кабели.
Преимущества параллельного метода:
-
Уменьшение уровня помех, а соответственно и количества ошибок
-
Высокая скорость
-
Действие на большие расстояния
IBM использует для реализации параллельного метода оптоволоконные линии связи (144 провода и 72 провода). Этот метод используется IBM для передачи информации в хранилища данных.
-
Последовательный метод
Он бывает 3 типов:
-
Битовая синхронизация (отвечает за передачу отдельных бит).
-
Байтовая синхронизация (отвечает за способ разделения байтов на биты).
-
Синхронизация сообщений (нумерация сообщения мешает пропаже сообщений).
Битовая и байтовая синхронизации реализованы на аппаратном уровне, а синхронизация сообщений – на символьном (кодовом) уровне. Битовая и байтовая синхронизации делятся на 2 типа:
-
Последовательная асинхронная – не означает, что в методе нет синхронизации. В этом методе есть только один асинхронный параметр – момент начала сообщения.
-
Последовательная синхронная.
Основная разница между последовательными синхронным и асинхронным методами в том, что первый передаёт информацию большими блоками (несколько сот бит), а второй передаёт информацию короткими блоками.
2.16. МОДЕМЫ КАК ПЕРИФЕРИЙНЫЕ УСТРОЙСТВА. СИСТЕМА КОМАНД ХЕЙЗА. МОДЕМЫ СЕРИИ MNP. ОСОБЕННОСТИ МОДЕМОВ КЛАССОВ MNP-5,7,10. КОМАНДЫ МОДЕМА.
Система команд Хейза. Стандарт для набора команд встроенного модема был разработан фирмой Hayes Microcomputer Prodacts (Хейза). Набор команд модема Хейза, который называется также АТ-набором команд (поскольку буквы AT инициируют работу модема), позволяет с подключенного компьютера выполнять многие функции.
А: Ответить на поступающий вызов
С: Включить и выключить сигнал несущей частоты
D: Набрать номер телефона
Е: Отобразить на экране символы, пересылаемые на модем
F: Переключить модем с полудуплексного в дуплексный режим работы
Н: Снять или повесить телефонную трубку
I: Запросить код идентификации или контрольную сумму
О: Подключить модем к линии
X: Использовать базовый или расширенный набор кодов результата
Z: Привести модем в исходное состояние
С помощью команд этого набора можно просматривать и изменять содержимое внутренних регистров модема. Эти регистры позволяют задавать параметры операций, например, число звонков (индукторного вызова) и др.
Протоколы серии MNP. MNP (Microcom Networking Protocol) — это серия протоколов организации связи между компьютерами, созданные фирмой Microcom. Разработано несколько спецификаций коррекции ошибок и сжатия данных. Каждая следующая спецификация стандарта, как правило, наследует возможности предшествующей (совместимость снизу вверх).
Протоколы MNP 5, V.42bis Оба протокола обеспечивают сжатие передаваемых данных; коэффициент 2 (для MNP 5) и 4 (для V.42bis). Но в зависимости от типа передаваемых данных с протоколом MNP 5 может произойти замедление передачи. Спецификация MNP 5 подразумевает два метода сжатия данных. Согласно первому методу часто встречающиеся в посылках данные укорачиваются с 8 бит до 4 бит, а встречающиеся редко — удлиняются. Второй метод состоит в том, что повторяющиеся 3 раза подряд (и более) байты данных кодируются двумя посылками: первая содержит повторяющийся байт данных, а вторая — число его повторений.
Протокол MNP 7 В спецификации MNP 7 в отличие от MNP5 используется более совершенная процедура сжатия данных, которая обеспечивает коэффициент сжатия информации до 4.
Протокол MNP 10 Спецификация MNP 10 опирается на предыдущие спецификации и демонстрирует свою мощь, прежде всего, на линиях связи с высоким уровнем помех. Таковыми являются межконтинентальные линии и радиосети. В соответствии с этой спецификацией в момент установления связи (Negotiated) на передатчике и приемнике устанавливается самая низкая скорость обмена данными, которая повышается во время сеанса связи, если характеристики линии допускают это. В режиме Robust Auto Reliable Mode повышается число попыток установлений соединения на линиях, в которых возникают помехи, в то время как в режиме Dynamic Speed Upshift адаптируется скорость передачи данных к уровню помех на линии. Согласно процедуре Aggresive Packet Adaptive Assembly в случае установления уверенной связи последовательно увеличивается величина пакета данных, начиная с наименьшего объема (8 бит) и до 256 бит в зависимости от качества линии. Модемы с динамической настройкой уровня передачи (Dynamic Transmit Level Adjustment) специально для радиосетей могут адаптировать передачу информации, используя оценку уровня ошибок.
2.17. МЕТОДЫ МАГНИТНОГО ЗАПИСЫВАНИЯ ИНФОРМАЦИИ И ИХ ПРИМЕНЕНИЕ.
-
RZ – (return to zero) метод возвращения в 0
-
NRZ – без возвращения в 0
-
PM
-
FM
-
MFM
-
RLL
-
ARLL
Расшифровка:
-
Метод записи на предварительно размагниченный носитель. Плохая плотность.
-
Без возвращения в 0. Это метод многодорожкового записывания информации, где одна дорожка используется как одна.
-
Фазовый способ записи.
-
Частотный способ записи.
-
Модифицированный частотный способ. DOS-стандарт с удвоенной плотностью.
-
На жёстких дисках.
-
Стандарт (зафиксированная скорость вращения дискет и частота).
-
Этот метод обеспечивает низкую амплитуду считывания. Имеет меньшую плотность. Он является самосинхронизирующимся (из сигнала можно выделить синхроимпульс). Групповая ошибка не возникает. Способ годен для систем записывания с одной и несколькими дорожками.
-
Нет импульса синхронизации. Подходит для носителей информации с несколькими дорожками, где одна из дорожек содержит импульс синхронизации. Существует возможность возникновения групповой ошибки только по причине того, что пропал 1 импульс.
-
На каждую “1” осуществляется изменение напряжения.
6. RLL ведет происхождение от метода, используемого при цифровой записи на магнитную ленту. Принцип RLL, следующий: каждый байт поступающих данных разделяется на два полубайта, а затем полубайты кодируются специальным 5-разрядным кодом, отличающимся тем, что каждое число в нем содержит по меньшей мере одну перемену направления потока. При считывании каждые. две 5-разрядные кодовые группы переводятся обратно в двоичные полубайты, объединяются и передаются в виде полного байта.
Особенность, требующаяся от 5-разрядного кода, следующая: в любом его числе не должно быть больше двух рядом стоящих 0. Мало того, и, в любой используемой комбинации 5-разрядных кодов должно быть не больше двух стоящих рядом 0. Из 32 кодовых комбинаций, возможных при 5-разрядном коде, этим условиям отвечают 16. Они и приняты для кодирования по методу RLL (см. табл. 2.1).
При RLL скорость передачи данных возрастает с 250 до 380 Кбит/сек, а число перемен направления потока на единицу длины до 3330 перемен/см. При скорости передачи 380 кбит/с длительность битового элемента снижается до 2,6 мкс. Кроме того, требуется всего одно временное окно вместо двух, поскольку не нужно разделять перемены потока, соответствующие данным и синхронизации, и любая перемена направления потока всегда будет происходить в середине битового элемента.
2.18. ЧАСТОТНЫЙ И МОДИФИЦИРОВАННЫЙ ЧАСТОТНЫЙ МЕТОДЫ ЗАПИСИ ИНФОРМАЦИИ. ФОРМАТ СЕКТОРА НА ГИБКОМ ДИСКЕ. СПОСОБЫ ПОЗИЦИОНИРОВАНИЯ ГОЛОВОК В ДИСКОВЫХ УСТРОЙСТВАХ МАГНИТНОГО ЗАПИСЫВАНИЯ ИНФОРМАЦИИ.
1. Частотная модуляция.
Кодирование по методу частотной модуляции FM можно было бы назвать кодированием с единичной плотностью. При этом, методе в начале битового элемента записывается бит Синхронизации, а в промежутках между последними — биты данных. Битовый элемент определяется как минимальный интервал времени между битами данных, получаемый при постоянной скорости вращения диска 300 об/мин. В случае гибкого диска диаметром 133 мм каждый битовый элемент при FM имеет длительность 8 мкс; бит данных записывается в середине битового элемента, через 4 мкс после бита синхронизации.
Д-импульс
данных, С-синхроимпульс
При FM гарантируется по меньшей мере одна перемена направления потока, т.е. в данном случае один бит данных каждые 8 мкс. Такой интервал времени соответствует максимальной продольной плотности (по магнитному потоку) 2330 перемен на 1 см и скорости передачи данных 125 Кбит/сек.
То обстоятельство, что при FM длительность битового элемента, определяемая частотой следования синхроимпульсов, постоянна, упрощает кодирование и декодирование по этому методу. Импульсная синхронизация и образование окна длительностью 4 мкс через 2 мкс после синхроимпульса позволяют легко обнаружить наличие или отсутствие перемены в направлении потока. Благодаря этому схемы кодирования-декодирования могут быть очень простыми. Фактически при записи с единичной плотностью схемы выделения данных (так называют схемы, используемые для кодирования и декодирования данных, хранимых на магнитном диске) в большинстве случаев сводятся к одной простой схеме, вырабатывающей временные стробы, правильно расположенные относительно битов синхронизации.
Но наличие этих битов синхронизации как раз и составляет главный недостаток метода FM: код в принципе малоэффективен, поскольку половина наличной рабочей поверхности диска отводится под биты, необходимые для синхронизации. Если записываются все 1, то частота перемен направления магнитного потока оказывается вдвое выше фактической частоты поступления данных, потому что в каждом битовом элементе записываются и бит синхронизации, и бит данных. Если пользоваться FM-кодированием, то даже при удвоенной плотности дорожек и записи на обеих сторонах диска максимальная информационная емкость диска будет всего 500 Кбайт. Чтобы повысить ее, не прибегая к увеличению плотности дорожек, необходимо повысить продольную плотность за счет более продуманного кодирования, обладающего большей эффективностью, чем FM.
2. Модифицированная частотная модуляция.
Метод MFM позволяет вдвое увеличить продольную плотность записи благодаря тому, что на тех местах, где при FM размешаются биты синхронизации, теперь находятся биты данных. При этом методе длительность битового элемента сокращается вдвое — до 4 мкс. Биты синхронизации все-таки приходится использовать, но при MFM они записываются лишь в том случае, если в предшествующем и текущем битовых элементах не были записаны биты данных. При записи данных бит синхронизации размещается в начале битового элемента, а бит данных — в его середине, в точности так же, как при РМ. И все же MFM позволяет удвоить как информационную емкость диска, так и скорость передачи данных, так как при ней в одном и том же битовом элементе никогда не размещаются и бит синхронизации, и бит данных, и на один битовый элемент приходится только одна перемена направления потока.

Формат сектора на гибком диске.
|
Идентификатор сектора |
Зазор идентификатора |
Блок данных |
|||
|
Маркер идентификатора |
Идентификатор адреса |
Маркер данных |
Поле данных |
Код циклического контроля |
|
2.20. КОМП’ЮТЕРНІ МЕРЕЖІ. КЛАСИФІКАЦІЯ МЕРЕЖ. ЗАГАЛЬНІ ХАРАКТЕРИСТИКИ ГЛОБАЛЬНИХ, ЛОКАЛЬНИХ, КОРПОРАТИВНИХ МЕРЕЖ (ВІДДІЛІВ, КАМПУСІВ, ПІДПРИЄМСТВ). ВІРТУАЛЬНІ ПРИВАТНІ МЕРЕЖІ (VPN – VIRTUAL PRIVATE NETWORK).
Компьютерные (вычислительные) сети с одной стороны сети представляют собой частный случай распределенных вычислительных систем, в которых группа компьютеров согласованно выполняет набор взаимосвязанных задач, обмениваясь данными в автоматическом режиме. С другой стороны компьютерные сети можно рассматривать как средство коммуникации или передачи информации на расстоянии, для чего в них применяются методы кодирования и мультиплексирования данных, получивших развитие в различных телекоммуникационных системах. Компьютерные сети представляют собой систему массового обслуживания.
Существует множество различных классификаций КС, рассмотрим некоторые из них:
-
По виду сигнала:
-
непрерывный (гармоники);
-
дискретный (импульсы или уровни);
-
цифровой (коды).
По непрерывности передачи:
-
асинхронные (неизвестно время начала и конца передачи);
-
синхронные (если передача началась – то идет с определенной частотой);
-
стартстопные (есть команды START и STOP).
По методу коммутации передачи:
-
коммутация каналов (напр. при использ. телеф. линий);
-
коммутация сообщений (использ. факсов и т. д.);
-
коммутация пакетов.
По способу уплотнения каналов:
-
временная модуляция;
-
статическая модуляция;
-
комбинированные способы.
По способу организации обратного ответа:
-
симплексный (широковещательное);
-
полудуплексный (DUPLEX);
-
дуплексный (FULL DUPLEX).
По наличию выделенной линии:
-
с наличием;
-
без наличия.
По способу доступа к среде:
-
случайный (возможны коллизии);
-
управляемый.
По виду передающей среды:
-
несимметричный кабель (электрокабель);
-
симметричный кабель (витая пара);
-
оптоволокно.
По организации ответа:
-
без подтверждения;
-
с подтверждением получения.
По топологии:
-
шина;
-
кольцо;
-
звезда;
-
ветвь;
-
дерево (дихотомическое и др. деревья);
-
полносвязная (все узлы соединены непосредственно между собой);
-
неполносвязная (для передачи используются промежуточные узлы);
-
смешанная.
По степени удаления и по скорости:
-
маленькая скорость – большое удаление;
-
большая скорость – малое удаление.
Наиболее часто используемая классификация сетей – это классификация по территориальной распределенности узлов:
- глобальные (WAN или территориально распределенные) сети покрывают большие территории (целые страны или даже континенты). WAN возникли на основе уже существующих телефонных линий. WAN представляет собой совокупность компьютеров (часто называемых хост-компьютерами) предназначенных для выполнения программ пользователей. Хост-компьютеры соединяются между собой через коммуникационные подсети, задача которых заключается в передачи сообщений от одного хост-компьютера к другому.
- локальные (LAN) сети – это объединение компьютеров, сосредоточенные на небольшой территории, обычно в радиусе не более 1-2 км. В общем случае локальная сеть представляет собой коммуникационную систему, принадлежащую одному предприятию. Локальные сети имеют по сравнению с глобальными значительно большую скорость передачи (даже адаптеры первого поколения обеспечивали скорость до 10Мбит/c).
- корпоративные сети – это сети масштаба корпорации, объединяющие большое число компьютеров на всех территориях отдельного предприятия. Они могут быть сложно связанны и покрывать город, регион или даже континент. Для соединения компьютеров в них применяют самые разнообразные каналы (телефонные, радиоканалы, спутниковые каналы). Непременным атрибутом таких сетей является высокая степень неоднородности. Корпоративные сети включают в себя сети масштаба предприятия, кампуса, отдела.
- виртуальная частная сеть (VPN) – сети создаваемые крупными предприятиями, состоящие из рассредоточенных отделений и филиалов, а также имеющих сотрудников, которые работают дома. VPN создает иллюзию, что все отделения и филиалы предприятия соединены частной сетью, полностью принадлежащей и полностью управляемой предприятием, когда на самом деле в ряде участков сети используются общедоступные каналы.
2.21. ЗАГАЛЬНІ ВИМОГИ ДО КОМП’ЮТЕРНИХ МЕРЕЖ: ПРОДУКТИВНІСТЬ (productivity), НАДІЙНІСТЬ (reliability), ПОШИРЮВАНІСТЬ (extensibility), БЕЗПЕЧНІСТЬ (security), СТІЙКІСТЬ ДО ВІДМОВ (fault tolerance), ПРОЗОРІСТЬ (transparency), КЕРОВАНІСТЬ (controllebility), СУМІЩУВАНІСТЬ (compatibility), ГОТОВНІСТЬ (availability), ЯКІСТЬ ОБСЛУГОВУВАННЯ(Qyality of Service - QoS).
Главным требованием, предъявляемым к сетям, является выполнение сетью того набора услуг, для оказания которых она предназначена. Все остальные требования - связанны с качеством выполнения основной задачи.
* Производительность. Есть несколько основных характеристик производительности сети:
- время реакции является интегральной характеристикой производительности сети с точки зрения пользователя. Время реакции–общее время между возникновением запроса и получением ответа. Время реакции в свою очередь состоит из времени подготовки запроса, время передачи запроса, время обработки запроса и время передачи ответа. Знание составляющих времени реакции позволяет определить узкие места в сети.
- скорость передачи данных отражает объем данных преданных через сеть в единицу времени. Выделяют среднюю, мгновенную скорость и максимальную скорость.
- задержка передачи определяется как задержка между моментом поступление входных данных на какое-либо сетевое устройство и моментом появления их на выходе этого устройства.
* Надежность. Характеризуется: - сохранность данных и защита их от искажений (обычно обеспечивается созданием копий), -вероятность доставки пакета (вероятность доставки пакета без искажений)
* Расширяемость означает возможность сравнительно легкого добавления отдельных элементов сети, наращивание длинны сегментов и замены существующей аппаратуры более мощной.
* Безопасность (способность системы защитит данные от несанкционированного доступа. Обеспечить безопасность в распределенной системе гораздо сложнее чем централизованной, что связанно с множеством точек доступа и слабой защищенностью линий передачи )
* Отказоустойчивость (способность скрывать от пользователя отказ отдельных ее компонентов. Например, если копии базы данных хранятся на нескольких серверах, то пользователь может не заметить отказа одного из них и продолжит работать со второй копией. В отказоустойчивой системе отказ одного элемента приходит к снижению качества ее работы, а не к полному останову).
* Прозрачность сети достигается в том случае, когда сеть представляется пользователю не как множество отдельных компьютеров, соединенных сложной системой кабелей, а как единая традиционная вычислительная машина с системой разделения времени. Прозрачность может быть на уровне пользователя на уровне программиста. Сеть должна скрывать все особенности операционной системы и коммуникационных протоколов и унифицировать интерфейс доступа.
* Управляемость подразумевает возможность централизованно контролировать состояние основных элементов сети, выявить и устранить проблемы, возникающие при работе сети, выполнять анализ производительности и планировать развитие сети.
* Совместимость означает что сеть способна включать в себя самое разнообразное аппаратное и программное обеспечение. Сеть состоящая из разнотипных элементов называют однородной или гетерогенной.* Коэффициент готовности или готовность означает долю времени в течении которого система может быть использована (повышается путем введения избыточности в структуру системы);
* Качество обслуживания определяет количественные оценки вероятности того, что сеть будет передавать определенный поток данных между двумя определенными узлами в соответствии с потребностями приложений или пользователя. Например при передаче голосового трафика под качеством обслуживания понимают, то что пакеты доставляются с задержкой не более Nмс. Чаще всего параметры, фигурирующие в разнообразных критериях качества сводятся к: скорости передачи данных; задержки передачи пакетов; уровень потерь и искажений пакетов.
2.22. CТАНДАРТ БАГАТОРІВНЕВОГО КЕРУВАННЯ МЕРЕЖЕЮ (МОДЕЛЬ ВЗАІМОДІЇ ВІДКРИТИХ СИСТЕМ – OPEN SYSTEM INTERCONNECTION, OSI). ПОНЯТТЯ ПРОТОКОЛУ, ІНТЕРФЕЙСУ, СТЕКУ ПРОТОКОЛІВ.
Как правило сеть стоит из разнородного оборудований и поэтому проблема совместимости стоит наиболее остро. Проблема взаимодействия между устройствами в сети очень сложная и для ее решения используется декомпозиция. Декомпозиция заключается в разбиении задачи на модули и четкого определения функций каждого модуля и порядка их взаимодействия. При декомпозиции часто используют многоуровневый подход. Он заключается в том, что все множество модулей, решающих частные задачи, разбивают на группы и упорядочивают и группы по уровням. В соответствии с принципом иерархии для каждого промежуточного уровня можно четко указать вышележащий и нижележащий уровень. Группа модулей, составляющих каждый уровень должна быть сформирована так, чтобы все модули этой группы для выполнения своих задач обращались с запросами только к модулям соседнего нижележащего уровня. С другой стороны результаты работы модулей могут быть переданы только модулям соседнего вышележащего уровня.
В результате достигается относительная независимость уровней и возможность их автономной разработки модификации и управления. Опираясь на принцип декомпозиции и иерархического упорядочивания международная организация по стандартизации ISO предложила семиуровневою модель OSI.
Прикладной уровень -> Представительный уровень -> Сеансовый уровень -> Транспортный уровень -> Сетевой уровень -> Канальный уровень -> Физический уровень
Многоуровневое представление средств сетевого взаимодействия имеет свою специфику, связанную с тем, что необходимо обеспечить согласованную работу двух “иерархий” работающих на различных компьютерах. У двух сторон взаимодействия должны соответствовать уровни и форма сигналов, размеры и структура сообщений и т. д.
Формализованные правила определяющие последовательность и формат сообщений, которыми обмениваются сетевые компоненты, лежащие на одном уровне, но на различных узлах – называются протоколом.
Модули, реализующие протоколы соседних уровней и находящихся на одном узле, также взаимодействуют друг с другом с помощью стандартизованных форматов сообщений
в соответствии с четко определенными правилами называемыми интерфейсом. Интерфейс фактически представляет собой набор сервисов предоставляемых данным уровнем соседнему уровню.
Иерархически организованный набор протоколов, достаточный для организации взаимодействия протоколов в сети, называют стеком протоколов.
Протоколы нижнего уровня организовывают как правило аппаратно, а протоколы верхнего уровня как правило программно.
2.23. ПЕРЕДАВАННЯ ДАНИХ НА ФІЗИЧНОМУ РІВНІ. АНАЛОГОВА ТА ДИСКРЕТНА МОДУЛЯЦІЯ. ПОТЕНЦІАЛЬНІ КОДИ: БЕЗ ПОВЕРНЕННЯ ДО НУЛЯ (NRZ), БІПОЛЯРНИЙ КОД З АЛЬТЕРНАТИВНОЮ ІНВЕРСІЄЮ (АМІ), КОД З ІНВЕРСІЄЮ ПРИ ОДИНИЦІ (NRZI), КОД 2B1Q (ДВА БІТА ПЕРЕДАЮТЬСЯ ЧОТИРМА РІВНЯМИ ПОТЕНЦІАЛІВ). ІМПУЛЬСНІ КОДИ: БІПОЛЯРНИЙ ІМПУЛЬСНИЙ, МАНЧЕСТЕРСЬКИЙ. ПОРІВНЯННЯ ЇХ ХАРАКТЕРИСТИК.
Физический уровень в семиуровневой модели OSI имеет дело с передачей битов по физическим каналам связи. К этому уровню имеют отношение характеристики физических сред передачи данных, а также характеристики передаваемых электрических сигналов. Кроме того здесь стандартизуются разъемы и назначения каждого контакта.
При передачи данных на физическом уровне применяют два основных типа физического кодирования – на основе синусоидального несущего сигнала (аналоговая модуляция) и на основе последовательности прямоугольных импульсов (дискретная модуляция).
Аналоговая модуляция применяется для передачи дискретных данных по каналам с узкой полосой частот, типичным представителем которых являются каналы тональной частоты телефонных сетей.
Существует несколько типов аналоговой модуляции: амплитудная, частотная и фазовая модуляция. Часто используют комбинированные методы модуляции.
Дискретные способы модуляции основаны на дискретизации непрерывных процессов, как по амплитуде так и по времени. Дискретная модуляция основана на теореме Найквиста-Котельникова: аналоговая функция может быть достаточно точно восстановлена из ее дискретных значений, если частота дискретизации была в два или более раза больше частоты самой высокой гармоники спектра исходной функции.
При цифровом кодировании дискретной информации применяют потенциальные (используется уровень сигнала) и импульсные коды (для представления данных используют либо импульсы определенной полярности либо перепады потенциала).
NRZ: При передачи последовательности единиц уровень сигнала не возвращается к нулю в течении такта (в отличии от других способов кодирования). Важным недостатком этого кода является отсутствие самосинхронизации и наличие низкочастотной составляющей частота, которая на больших последовательностях нулей или единиц стремится к нулю. Преимущество – достаточно низкая частота основной гармоники.
А МІ:
в этом методе используется три уровня
потенциала: +1, 0, -1. Ноль кодируется
нулевым уровнем, а единица либо
положительным либо отрицательным
потенциалом (каждая новая единица
противоположна по потенциалу предыдущей).
Этот код частично ликвидирует проблему
отсутствия самосинхронизации и проблему
низкочастотной составляющей.
МІ:
в этом методе используется три уровня
потенциала: +1, 0, -1. Ноль кодируется
нулевым уровнем, а единица либо
положительным либо отрицательным
потенциалом (каждая новая единица
противоположна по потенциалу предыдущей).
Этот код частично ликвидирует проблему
отсутствия самосинхронизации и проблему
низкочастотной составляющей.
NRZI: Этот код очень похож на AMI – только использует два уровня сигнала. При передаче единицы – потенциал инвертируется, а при передаче нуля – остается прежним. Используется там, где нежелательно наличие третьего уровня сигнала (например в оптоволоконных линиях – где есть два состояния свет и тьма). Этот код обладает теми же недостатками что и AMI.
2B1Q: Это код с четырмя уровнями сигнала. За один такт передается 2 бита: 00 - -2,5В; 01 - -0,833 В; 11 - +0,833 В; 10 - +2,5В. Т. е. Этот код обеспечивает в два раза большую скорость по сравнению с предыдущими кодами. Для передачи мощность передатчика должна быть выше, чтобы на приемной стороне возможно было различить 4 уровня сигнала.
Біполярний імпульсний – импульсный код в котором единица представлена импульсом одной полярности, а ноль – другой. Каждый импульс делится на половину такта. Преимущество – самосинхронизирующийся. Недостаток – слишком широкий спектр.
Манчестерський: Имульсный код, который использует перепад потенциала, который происходит в середине каждого такта. Еденица кодируется перепадом от низкого уровня к высокому, а ноль – наоборот. В начале каждого такта может произойти служебный перепад синала, если требуется закодировать последовательность нулей или едениц. Преимущества – самосинхронизирующийся, имеет довольно узкую полосу пропускания, нет постоянной составляющей.
2.24. ПРОТОКОЛИ КАНАЛЬНОГО РІВНЯ: АСИНХРОННІ, СИНХРОННІ (СИМВОЛЬНО-ОРІЄНТОВАНІ, БІТ-ОРІЄНТОВАНІ). ПРОТОКОЛИ З ВСТАНОВЛЕННЯМ З’ЄДНАННЯ ТА БЕЗ ВСТАНОВЛЕННЯ.
Канальный уровень обеспечивает передачу пакетов данных, поступающих от протоколов верхних уровней, узлу назначения, адрес которого также указывает протокол верхнего уровня. Протоколы канального уровня оформляют переданные им пакеты в кадры собственного формата, помещая указанный адрес назначения в одно из полей такого кадра, а также сопровождая кадр контрольной суммой. Протокол канального уровня обычно работает в пределах одной сети, которая, как правило, входит в более крупную составную сеть, объединяемую протоколами сетевого уровня. Адреса, с которыми работает протокол канального уровня, используются для доставки кадров только в пределах этой сети, а для перемещения пакетов из сети в сеть применяются уже адреса следующего, сетевого уровня.
Наиболее существенными характеристиками метода передачи, а значит, и протокола, работающего на канальном уровне, являются следующие:
-
асинхронный/синхронный;
-
символьно-ориентированный/бит-ориентированный;
-
с предварительным установлением соединения/дейтаграммный;
-
с обнаружением искаженных данных/без обнаружения;
-
с обнаружением потерянных данных/без обнаружения;
-
с восстановлением искаженных и потерянных данных/без восстановления;
-
с поддержкой динамической компрессии данных/без поддержки.
Асинхронные протоколы
Асинхронные протоколы предоставляют наиболее старый способ связи. Эти протоколы оперируют не с кадрами, а с отдельными символами, которые представлены байтами со старт-стоповыми символами.
Единицей передаваемых данных в асинхронных протоколах является не кадр данных, а отдельный символ, который чаще всего представлен одним байтом Некоторые символы имеют управляюший характер, например символ <CR> предписывает телетайпу или дисплею выполнить возврат каретки на начало строки. В этих протоколах существуют управляющие последовательности, обычно начинающиеся с символа < ЕSC>.
О писанный
режим работы называется асинхронным,
или
старт-стопным.
В
асинхронном режиме каждый байт данных
сопровождается специальными сигналами
«старт» и «стоп» (рис. 5.9, а).
писанный
режим работы называется асинхронным,
или
старт-стопным.
В
асинхронном режиме каждый байт данных
сопровождается специальными сигналами
«старт» и «стоп» (рис. 5.9, а).
Рис. 5.9. Асинхронная (а) и синхронная (б) передачи на уровне байтов