

-
Исследование скорректированной системы.
-
Анализ точности системы
-
Ранее при исследовании системы, имеющей желаемую ЛАХ, был выполнен анализ ее точности при отработке гармонического или эквивалентного гармонического воздействий. Дополнительно следует провести следующий анализ.
а)
для входного воздействия вида
 определить максимальное значение
круговой частоты
определить максимальное значение
круговой частоты ,
при котором установившаяся ошибка
,
при котором установившаяся ошибка
 не превысит указанного в задании
значения
не превысит указанного в задании
значения ;
;
 ;
;
 +
+ .
.
 ;
;
 ;
;

 ;
;
 ;
;
 рад/с
рад/с
б)
получить аналитическое выражение для
установившейся ошибки
 при подаче на вход системы воздействия
вида
при подаче на вход системы воздействия
вида ;
;

 ;
;
 ;
;
 +
+
 .
.
-
Анализ динамических свойств системы на эвм
Он включает в себя следующие этапы:
-
получение переходной характеристики и амплитудной частотной характеристики или ЛАХ замкнутой системы;
-
определение фактических значений показателей качества скорректированной системы σ,
 и M и сравнение их с соответствующими
значениями для желаемой системы и с
требованиями задания;
и M и сравнение их с соответствующими
значениями для желаемой системы и с
требованиями задания; -
исследование чувствительности системы к вариациям параметров.
На рисунках представлена структурная схема скорректированной системы и её характеристики:
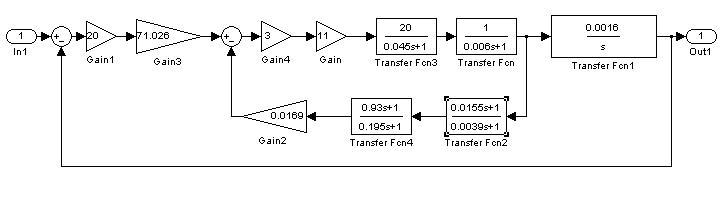
Рис. 6 Структурная схема скорректированной системы

Рис. 7 Переходная характеристика
Из характеристики определим:
σ = 12.4%
tp = 0.269 c.
Увеличим постоянную времени T0 в 2 раза и определим параметры системы.
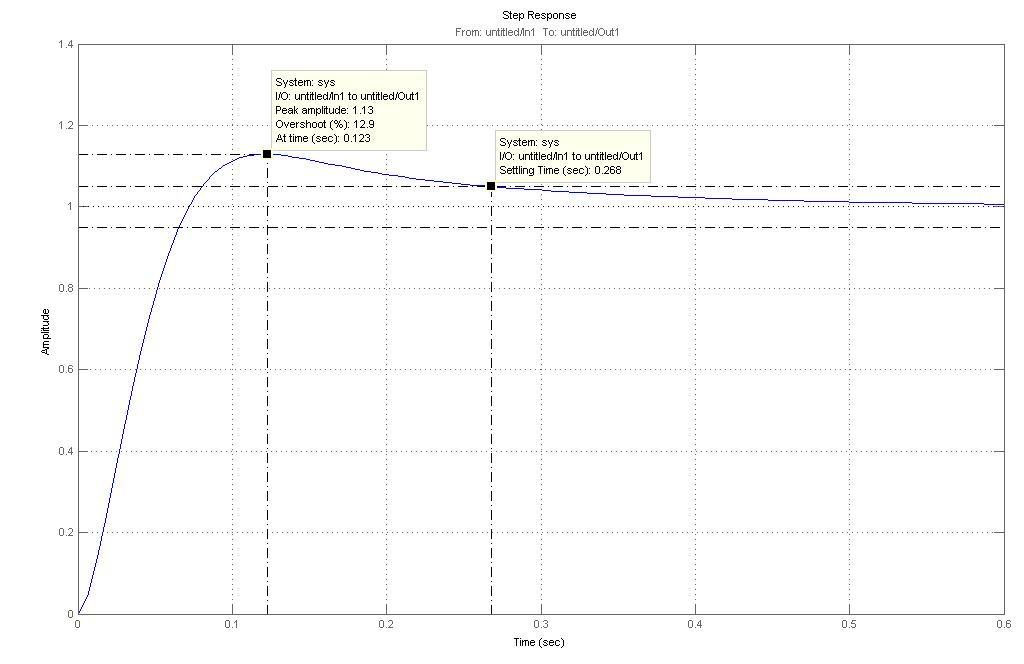
Рис. 8 Переходная характеристика с измененным T0
Из характеристик определим:
σ = 12.9%
tp = 0.268c.
Видно, что , при изменении постоянной времени T0 характеристики системы изменяются незначительно.
-
Выводы по работе.
В результате работы была разработана следящая система. Имея исходную систему и требования к её точности, мы ввели корректировку, в результате которой система стала удовлетворять заданным показателям точности. Так же мы рассчитали электрическую схему системы, построенную на операционных усилителях. После этого мы проанализировали точность и динамические свойства системы.
-
Список литературы
-
Второв В. Б. Методические указания к курсовой работе по дисциплине «Теория автоматического управления». СПб.: ГЭТУ, 1995.
-
Макаров И. М., Менский Б. М. Линейные автоматические системы (элементы теории, методы расчета и справочный материал). М.: Машиностроение, 1982.
-
Второв В. Б. Примеры решения задач по теории автоматического управления (структурные и частотные методы): Учеб. пособие. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2002.
-
Честнат Г., Майер Р. Проектирование и расчет следящих систем и систем регулирования. Ч.1. М.; Л.: Энергоиздат, 1959.
-
Волков Н. И., Миловзоров В. П. Электромашинные устройства автоматики. М.: Высш. школа, 1986.
-
Тахванов Г. И. Операционные блоки автоматических управляющих устройств. М.: Энергоатомиздат, 1989.